También podría gustarte
- Aplicacion de Los Convertidores CCDocumento3 páginasAplicacion de Los Convertidores CCMiguelAún no hay calificaciones
- Sistema Controlado de PotenciaDocumento18 páginasSistema Controlado de PotenciaEddie SatoAún no hay calificaciones
- Aplicación de Los Convertidores CCDocumento3 páginasAplicación de Los Convertidores CCJulio César De Dios40% (5)
- Qué Es Electrónica de PotenciaDocumento46 páginasQué Es Electrónica de PotenciaGladys Falconi AlejandroAún no hay calificaciones
- Introduccion A La Electronica de PotenciaDocumento54 páginasIntroduccion A La Electronica de Potenciajose luisAún no hay calificaciones
- Dispositivos de Control de PotenciaDocumento65 páginasDispositivos de Control de PotenciaMarco MaugardAún no hay calificaciones
- INTRODUCCION Electronica PotenciaDocumento6 páginasINTRODUCCION Electronica PotenciaErnesto RazettoAún no hay calificaciones
- Introduccion ConvertidoresDocumento22 páginasIntroduccion ConvertidoresMaria Jose CabreraAún no hay calificaciones
- Introducción a la electrónica de potenciaDocumento57 páginasIntroducción a la electrónica de potenciaangel100% (1)
- Flujograma de Conversores Estaticos de EnergiaDocumento4 páginasFlujograma de Conversores Estaticos de EnergiaDarwin LemaAún no hay calificaciones
- Conversores de EnergíaDocumento53 páginasConversores de EnergíaPatrick Fs DeadLove100% (1)
- Rectificadores RegenerativosDocumento4 páginasRectificadores Regenerativosxavier2ramos-1Aún no hay calificaciones
- Unidad 1 Introducción A La Electrónica de PotenciaDocumento17 páginasUnidad 1 Introducción A La Electrónica de PotenciaLeinner Said Redondo MenesesAún no hay calificaciones
- Electronica de Potencia II - Convertidores de VoltajeDocumento4 páginasElectronica de Potencia II - Convertidores de VoltajeLuis GoenagaAún no hay calificaciones
- Convertidores de Energia ElectricaDocumento21 páginasConvertidores de Energia ElectricaRubén MelgozaAún no hay calificaciones
- Diseño Del Convertidor Inversor CDDocumento25 páginasDiseño Del Convertidor Inversor CDDavid SanchezAún no hay calificaciones
- ConvertidoresEnergiaDocumento7 páginasConvertidoresEnergiaDavid IlvisAún no hay calificaciones
- Convertidores Estaticos de EnergiaDocumento16 páginasConvertidores Estaticos de EnergiaFreddy Patricio100% (1)
- Electronica de PotenciaDocumento97 páginasElectronica de PotenciaMaximo Matias Nuñez PonceAún no hay calificaciones
- Electronica de PotenciaDocumento97 páginasElectronica de PotenciaVictor Pedro Uturunco CondoriAún no hay calificaciones
- Parte ADocumento9 páginasParte Ajose alfredo martinezAún no hay calificaciones
- Articulo Ep Valentina DiazDocumento6 páginasArticulo Ep Valentina DiazMartinAún no hay calificaciones
- Control AC/DC con PFC y balance de potenciasDocumento5 páginasControl AC/DC con PFC y balance de potenciasEfren JamiAún no hay calificaciones
- INVERSORES Ríos Vasquez José PabloDocumento6 páginasINVERSORES Ríos Vasquez José PabloEzZ ScaReCroWAún no hay calificaciones
- Electronica de Potencia Trabajo Final Electrónica de PotenciaDocumento3 páginasElectronica de Potencia Trabajo Final Electrónica de PotenciaSHIRLEY GAREYAún no hay calificaciones
- Electronica IDocumento12 páginasElectronica Iantonyventura672Aún no hay calificaciones
- Conversores Monofasicos TrifasicosDocumento6 páginasConversores Monofasicos TrifasicosMAYCOL EMJEYAún no hay calificaciones
- Pwmegyenir en EsDocumento15 páginasPwmegyenir en EsRobin EduardAún no hay calificaciones
- Conversores Monofásicos y Trifásicos ACDocumento8 páginasConversores Monofásicos y Trifásicos ACMANUEL BOLIVAR TAPIA QUIGUANGOAún no hay calificaciones
- Electronica - Potencia - Actividad Nro 2 EnsayoDocumento2 páginasElectronica - Potencia - Actividad Nro 2 EnsayoJoaquin CalderaAún no hay calificaciones
- UTN Santafe Electronica2 PDFDocumento611 páginasUTN Santafe Electronica2 PDFJuan MaAún no hay calificaciones
- Ieee Examen Pregunta 1Documento8 páginasIeee Examen Pregunta 1Pablo TonatoAún no hay calificaciones
- Introducción a la electrónica de potenciaDocumento13 páginasIntroducción a la electrónica de potenciaJOSE MARIA COCA PEREIRAAún no hay calificaciones
- Convertidores de potencia AC/AC y AC/DC: tipos, control y aplicacionesDocumento15 páginasConvertidores de potencia AC/AC y AC/DC: tipos, control y aplicacionesKEVIN HIDALGO VARGASAún no hay calificaciones
- Trabajo Investigativo de Convertidores DC-DC y Ac-AcDocumento9 páginasTrabajo Investigativo de Convertidores DC-DC y Ac-AcJesus OrtizAún no hay calificaciones
- Practica 4Documento7 páginasPractica 4Marjuri ChacónAún no hay calificaciones
- InversorDocumento7 páginasInversorDanny delaCruzAún no hay calificaciones
- Fundamentals of Power Electronics EspañolDocumento54 páginasFundamentals of Power Electronics EspañolIsrael AucayAún no hay calificaciones
- Convertidores de Energia ElectricaDocumento11 páginasConvertidores de Energia ElectricaOctavio Lugo BAún no hay calificaciones
- Convertidores Ac - AcDocumento40 páginasConvertidores Ac - AcBrayan CuetoAún no hay calificaciones
- Distribución de Energía Eléctrica: Sistemas Fotovoltaicos InversoresDocumento40 páginasDistribución de Energía Eléctrica: Sistemas Fotovoltaicos InversoresMariano RiveroAún no hay calificaciones
- Convertidores estáticos: tipos y funcionamientoDocumento17 páginasConvertidores estáticos: tipos y funcionamientoDiana Carolina VillacisAún no hay calificaciones
- Texto - Control Electrónico - 2020 - U2 PDFDocumento19 páginasTexto - Control Electrónico - 2020 - U2 PDFJose GarciaAún no hay calificaciones
- Electronica IIDocumento611 páginasElectronica IIhmvhmv100% (1)
- Curso de InversoresDocumento19 páginasCurso de InversoresMartin AriasAún no hay calificaciones
- Controles - 5Documento18 páginasControles - 5Juan GámezAún no hay calificaciones
- Informe AC-DCDocumento10 páginasInforme AC-DCGustavo SuntaAún no hay calificaciones
- Leccion 1 Introduccion (JAIME)Documento48 páginasLeccion 1 Introduccion (JAIME)Jaime CoronelAún no hay calificaciones
- C1 Convertidores Estaticos EnergiaDocumento16 páginasC1 Convertidores Estaticos EnergiaEdgar MartinezAún no hay calificaciones
- Convertidores de EnergiaDocumento12 páginasConvertidores de EnergiaMario SamudioAún no hay calificaciones
- Fundamentos de Electronic A de PotenciaDocumento29 páginasFundamentos de Electronic A de Potenciafreddy_vargas_9Aún no hay calificaciones
- Introduccion A La Electronica de Potencia DIAPOSitivasDocumento21 páginasIntroduccion A La Electronica de Potencia DIAPOSitivasJOSE MARIA COCA PEREIRAAún no hay calificaciones
- Análisis de los parámetros de los conversores estáticos de energíaDocumento15 páginasAnálisis de los parámetros de los conversores estáticos de energíaangel caisaAún no hay calificaciones
- Convertidor CD CükDocumento4 páginasConvertidor CD CükDaniel HernandezAún no hay calificaciones
- Apuntes Unidad 1Documento23 páginasApuntes Unidad 1TOño PerezAún no hay calificaciones
- 1electronica de PotenciaDocumento29 páginas1electronica de PotenciaÁngel Steven Real GarcésAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Compensación de potencia reactiva en sistemas de distribuciónDe EverandCompensación de potencia reactiva en sistemas de distribuciónCalificación: 5 de 5 estrellas5/5 (1)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- El Imperialismo, Fase Superior Del Capitalismo de Lenin PDFDocumento89 páginasEl Imperialismo, Fase Superior Del Capitalismo de Lenin PDFJorge CastellanosAún no hay calificaciones
- Papel de Los Paises Centrales y de Los Paises Perifericos en El Proceso de Produccion y Distribucion de BienesDocumento6 páginasPapel de Los Paises Centrales y de Los Paises Perifericos en El Proceso de Produccion y Distribucion de BienesJuan Carlos Leca80% (5)
- Electrónica potencia controlDocumento5 páginasElectrónica potencia controlabel antonioAún no hay calificaciones
- 10 Instrumentacion ElectronicaDocumento12 páginas10 Instrumentacion Electronicaabel antonioAún no hay calificaciones
- Guia 2Documento8 páginasGuia 2abel antonioAún no hay calificaciones
- Desempeño EstudiantilDocumento8 páginasDesempeño Estudiantilabel antonioAún no hay calificaciones
- Taller de Inducción Servicio ComunitarioDocumento1 páginaTaller de Inducción Servicio Comunitarioabel antonioAún no hay calificaciones
- Modelo Propuesta de Electrificación de Redes en MediaDocumento79 páginasModelo Propuesta de Electrificación de Redes en Mediaabel antonioAún no hay calificaciones
- Orientaciones para Elaborar Trabajo IntegradoDocumento4 páginasOrientaciones para Elaborar Trabajo Integradoabel antonioAún no hay calificaciones
- Instrumentación ElectrónicaDocumento2 páginasInstrumentación Electrónicaabel antonioAún no hay calificaciones
- GlosarioDocumento5 páginasGlosarioabel antonioAún no hay calificaciones
- Leyes de la Termodinámica: conservación de la energía y aumento de la entropíaDocumento4 páginasLeyes de la Termodinámica: conservación de la energía y aumento de la entropíaabel antonioAún no hay calificaciones
- 10% Electronica de Potencia 2do CorteDocumento11 páginas10% Electronica de Potencia 2do Corteabel antonioAún no hay calificaciones
- 20% Electronica de PotenciaDocumento7 páginas20% Electronica de Potenciaabel antonioAún no hay calificaciones
- Amplificador operacional: Estructura, ventajas, desventajas y aplicacionesDocumento20 páginasAmplificador operacional: Estructura, ventajas, desventajas y aplicacionesabel antonioAún no hay calificaciones
- Electronica de Potencia 2do CorteDocumento11 páginasElectronica de Potencia 2do Corteabel antonioAún no hay calificaciones
- Electronica 3 - Proyecto 1Documento16 páginasElectronica 3 - Proyecto 1abel antonioAún no hay calificaciones
- Tarea MicroondasDocumento57 páginasTarea Microondasabel antonioAún no hay calificaciones
- Guia ProteusDocumento98 páginasGuia ProteusJuan LopezAún no hay calificaciones
- Unitario - Blog Del Covid-19Documento4 páginasUnitario - Blog Del Covid-19abel antonioAún no hay calificaciones
- Informe de SimulacionesDocumento13 páginasInforme de Simulacionesabel antonioAún no hay calificaciones
- Principios básicos de instrumentación electrónicaDocumento19 páginasPrincipios básicos de instrumentación electrónicaabel antonioAún no hay calificaciones
- Trabajo Servicio ComunitarioDocumento1 páginaTrabajo Servicio Comunitarioabel antonioAún no hay calificaciones
- Manual Servicio ComunitarioDocumento68 páginasManual Servicio ComunitarioorianyAún no hay calificaciones
- Practica de Laboratorio Virtual Con InformeDocumento1 páginaPractica de Laboratorio Virtual Con Informeabel antonioAún no hay calificaciones
- Servicio Comunitario Planteamiento Del ProblemaDocumento5 páginasServicio Comunitario Planteamiento Del Problemaabel antonioAún no hay calificaciones
- Micro OndasDocumento9 páginasMicro Ondasabel antonioAún no hay calificaciones
- Revista Fibra OpticaDocumento10 páginasRevista Fibra Opticaabel antonioAún no hay calificaciones
- Sistemas de Control e Instrumentos de Medición - Segunda ParteDocumento12 páginasSistemas de Control e Instrumentos de Medición - Segunda Parteabel antonioAún no hay calificaciones
- Instituto Tecnológico de TlalnepantlaDocumento27 páginasInstituto Tecnológico de TlalnepantlaElizabeth AlonsoAún no hay calificaciones
- Laboratorio 4 Ci - González Diana - 2344Documento12 páginasLaboratorio 4 Ci - González Diana - 2344Ronnie RodríguezAún no hay calificaciones
- Indicadores 2Documento3 páginasIndicadores 2CrishAún no hay calificaciones
- Ilovepdf MergedDocumento26 páginasIlovepdf MergedCulqui Coronado Roman0% (1)
- Anteproyecto de InvestigacionDocumento29 páginasAnteproyecto de InvestigacionLIZER LEBIS GARZON ALZATEAún no hay calificaciones
- Modulo B Desp Posit ReciprocanteDocumento49 páginasModulo B Desp Posit Reciprocantealan rodrigo reyes priorAún no hay calificaciones
- OPE-PRO-004 Trabajos en CalienteDocumento7 páginasOPE-PRO-004 Trabajos en CalienteCONSTRUCTEC RYDAún no hay calificaciones
- Caso Jugos PC2 OPEDocumento4 páginasCaso Jugos PC2 OPEJarif John Fernandez GutierrezAún no hay calificaciones
- 100 MT Plotter - Skycut V24Documento8 páginas100 MT Plotter - Skycut V24Kevin VidalonAún no hay calificaciones
- Análisis Térmico Torre SolarDocumento17 páginasAnálisis Térmico Torre SolarAlex LlumigusinAún no hay calificaciones
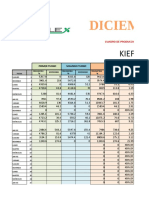
- Diciembre - Produccion Mensual ExtrusionDocumento9 páginasDiciembre - Produccion Mensual ExtrusionRoberto De Mesa PAún no hay calificaciones
- Despeje fórmulasDocumento19 páginasDespeje fórmulasFreddy GuamaniAún no hay calificaciones
- MACUSANIDocumento2 páginasMACUSANIWilfredo Ccolqque TtitoAún no hay calificaciones
- Indicadores para Medir El AvanceDocumento2 páginasIndicadores para Medir El Avancejoan alexisAún no hay calificaciones
- Evaluación del impacto al entorno humano por eventos de incendio en el Terminal de Abastecimiento EtenDocumento31 páginasEvaluación del impacto al entorno humano por eventos de incendio en el Terminal de Abastecimiento EtenwilyAún no hay calificaciones
- SeccionadorDocumento3 páginasSeccionadornanyrieraAún no hay calificaciones
- Laboratorio Fase 3 Luz Física ModernaDocumento29 páginasLaboratorio Fase 3 Luz Física ModernaKuro MoAún no hay calificaciones
- Tema 4 de TermodinamicaDocumento12 páginasTema 4 de TermodinamicaDanyo TorresAún no hay calificaciones
- Electronica Automotriz 01Documento5 páginasElectronica Automotriz 01Sandro Marvín Salazar QuintanillaAún no hay calificaciones
- Ejercicios P1Documento4 páginasEjercicios P1Ricardo AlmonteAún no hay calificaciones
- MI20200001 Resolucion y Orden FactoresDocumento16 páginasMI20200001 Resolucion y Orden FactoresLJL,LLC100% (1)
- Actividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Ciencias Basicas - Fundamentos de Quimica - (Grupo b01)Documento5 páginasActividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Ciencias Basicas - Fundamentos de Quimica - (Grupo b01)YAMILE ALMARIOAún no hay calificaciones
- PROGRAMA PILOTO Y CALIDAD DE SECADO DE MADERA Apuleia Leiocarpa (Vogel) J.F. Macbr. EN HORNO CONVENCIONAL ELÉCTRICO, MADRE DE DIOS-PERÚDocumento9 páginasPROGRAMA PILOTO Y CALIDAD DE SECADO DE MADERA Apuleia Leiocarpa (Vogel) J.F. Macbr. EN HORNO CONVENCIONAL ELÉCTRICO, MADRE DE DIOS-PERÚEDUARDO CESAR AMANCIOAún no hay calificaciones
- N-Xmart-Baterias - Ups 191119Documento35 páginasN-Xmart-Baterias - Ups 191119Javier Mosquera CarrilloAún no hay calificaciones
- Guía de Buenas Prácticas y Recomendaciones Sobre Uso Racional de La Energía en La Administración PúblicaDocumento43 páginasGuía de Buenas Prácticas y Recomendaciones Sobre Uso Racional de La Energía en La Administración PúblicaClaudia MunarrizAún no hay calificaciones
- Tarea 1 El Atomo y Sus Partículas SubatómicasDocumento11 páginasTarea 1 El Atomo y Sus Partículas SubatómicasEdgar LopezAún no hay calificaciones
- Adnova - THN - R410a Iom 1506 SDocumento23 páginasAdnova - THN - R410a Iom 1506 Ssantiago cuadradoAún no hay calificaciones
- 2018 Yb125 2XP4Documento54 páginas2018 Yb125 2XP4Andy VelaAún no hay calificaciones
- Turismo Sostenible: Implantación de Energías Renovables y Eficiencia EnergéticaDocumento22 páginasTurismo Sostenible: Implantación de Energías Renovables y Eficiencia EnergéticaRubersy Ramos GarcíaAún no hay calificaciones
- Presupuesto - Trabajo FinalDocumento4 páginasPresupuesto - Trabajo FinalLpz WltrAún no hay calificaciones