También podría gustarte
- Informe Cerchas Compuestas y ComplejasDocumento16 páginasInforme Cerchas Compuestas y ComplejasThalía M Zelada67% (3)
- Condensacion de La Matriz de Rigidez 2Documento35 páginasCondensacion de La Matriz de Rigidez 2Alejandra Briones MartinezAún no hay calificaciones
- Mapa Conceptual Tarea 1Documento1 páginaMapa Conceptual Tarea 1andres100% (1)
- Introducción a la Elasticidad y Resistencia de MaterialesDocumento239 páginasIntroducción a la Elasticidad y Resistencia de MaterialesAlexander Yedra100% (1)
- Decimales, Fracciones y RedondeosDocumento22 páginasDecimales, Fracciones y RedondeosGabo FloresAún no hay calificaciones
- Cálculo de Estructuras - Upc - Juan Miguel Canet PDFDocumento255 páginasCálculo de Estructuras - Upc - Juan Miguel Canet PDFDavid Lequenne Gracia Lequenne75% (4)
- Material Semana 1 - Reticulados de MaderaDocumento13 páginasMaterial Semana 1 - Reticulados de Maderagaston ozzuna100% (4)
- Condensacion de La Matriz de RigidezDocumento11 páginasCondensacion de La Matriz de RigidezKarlita Denisse CampoverdeAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Reticulados 2012Documento18 páginasReticulados 2012SahaquielAún no hay calificaciones
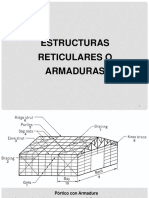
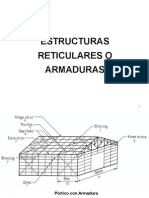
- Estructuras Reticulares o ArmadurasDocumento51 páginasEstructuras Reticulares o ArmadurasJ Rivera Alfaro100% (2)
- Estructuras Reticulares o ArmadurasDocumento51 páginasEstructuras Reticulares o ArmadurasJosé Alexis FaIse Salas SoteloAún no hay calificaciones
- ArmadurasDocumento20 páginasArmadurasVanny HR100% (2)
- Material Semana 1 - Calculo de ReticuladosDocumento19 páginasMaterial Semana 1 - Calculo de Reticuladosgaston ozzuna100% (1)
- File 1821935772Documento25 páginasFile 1821935772LeonardoSilva100% (1)
- Análisis de armaduras planasDocumento5 páginasAnálisis de armaduras planasCesar Flores100% (1)
- Determinación de esfuerzos internos en reticulados isostáticos mediante el método de los nudosDocumento25 páginasDeterminación de esfuerzos internos en reticulados isostáticos mediante el método de los nudosSERGIO7-SAún no hay calificaciones
- ISOSTATICADocumento25 páginasISOSTATICAERIAún no hay calificaciones
- ArmadurasDocumento17 páginasArmadurasivan hernandezAún no hay calificaciones
- Estructuras ReticularDocumento49 páginasEstructuras Reticularmarher26Aún no hay calificaciones
- Reticulados PlanosDocumento7 páginasReticulados PlanosrubinchissAún no hay calificaciones
- Estructuras Reticulares-ArmadurasDocumento38 páginasEstructuras Reticulares-ArmadurasANGIE NICOLLS RAMIREZ IDRUGOAún no hay calificaciones
- Estatica-RETICULADOSDocumento36 páginasEstatica-RETICULADOSMilenko BarreraAún no hay calificaciones
- TeoriaEstructuras TEMAIV-1 CelosiasPlanasDocumento20 páginasTeoriaEstructuras TEMAIV-1 CelosiasPlanasManu GimenezAún no hay calificaciones
- APUNTES 06 ReticuladosDocumento8 páginasAPUNTES 06 ReticuladosGonzalo BattistiAún no hay calificaciones
- Armaduras Isostaticas Articuladas JuanDocumento15 páginasArmaduras Isostaticas Articuladas JuanKelly LopezAún no hay calificaciones
- Unidad 5.4a - Cálculos Cerchas(Subrayada)Documento19 páginasUnidad 5.4a - Cálculos Cerchas(Subrayada)Miguel Angel Alvarado RodriguezAún no hay calificaciones
- Reticulados 2016Documento28 páginasReticulados 20161erodeelectro2022Aún no hay calificaciones
- Reticula DosDocumento19 páginasReticula DosSak Inga ParionaAún no hay calificaciones
- Unidad IV - Cadenas CinematicasDocumento9 páginasUnidad IV - Cadenas CinematicasAlejandro Daniel Insaurralde100% (1)
- Reticula Do 1Documento5 páginasReticula Do 1Carlos ParedesAún no hay calificaciones
- Elementos Estructurales en Armaduras PlanasDocumento8 páginasElementos Estructurales en Armaduras PlanasJosseph GuerreroAún no hay calificaciones
- Estructuras Reticulares PDFDocumento30 páginasEstructuras Reticulares PDFSean Torres100% (1)
- Estructuras Reticuladas 2015 ArielDocumento18 páginasEstructuras Reticuladas 2015 ArielAnita SuarezAún no hay calificaciones
- Armaduras 3Documento19 páginasArmaduras 3Jhordan GoetendiaAún no hay calificaciones
- Material Semana 1 - Reticulados de MaderaDocumento12 páginasMaterial Semana 1 - Reticulados de MaderaDavid HeraldoAún no hay calificaciones
- ArmadurasDocumento6 páginasArmadurasJoas GonzalezAún no hay calificaciones
- 2º Informe R2Documento30 páginas2º Informe R2anthony_24_1994Aún no hay calificaciones
- ARMADURASDocumento30 páginasARMADURASAnthony Paredes DelgadilloAún no hay calificaciones
- Estructuras cristalinas, parámetros reticulares y diagramas de difracciónDocumento18 páginasEstructuras cristalinas, parámetros reticulares y diagramas de difracciónmario alexisAún no hay calificaciones
- Veridico Teorema CastiglianoDocumento26 páginasVeridico Teorema CastiglianoSánchez MaemAún no hay calificaciones
- Capitulo 4.-Estructuras ArticuladasDocumento22 páginasCapitulo 4.-Estructuras ArticuladasJosè Luis Cortés TorresAún no hay calificaciones
- 3-Incognitas Estaticas Revision 2016 PDFDocumento23 páginas3-Incognitas Estaticas Revision 2016 PDFMaxi CarpAún no hay calificaciones
- 3-Incognitas Estaticas Revision 2016 PDFDocumento23 páginas3-Incognitas Estaticas Revision 2016 PDFMaxi CarpAún no hay calificaciones
- ArmadurasDocumento19 páginasArmadurasAlex Junior Rodriguez BarranzuelaAún no hay calificaciones
- Trabajo de CerchasDocumento7 páginasTrabajo de CerchasjoseAún no hay calificaciones
- Análisis y optimización de estructuras reticuladasDocumento10 páginasAnálisis y optimización de estructuras reticuladasEnrique ChungaAún no hay calificaciones
- Aplicación de Los Vectores A LaingenieriaDocumento23 páginasAplicación de Los Vectores A LaingenieriaGary Chavez VasquezAún no hay calificaciones
- Sistemas reticulados: tipos, condición de rigidez y determinación de esfuerzosDocumento23 páginasSistemas reticulados: tipos, condición de rigidez y determinación de esfuerzosLeonardo LunascoAún no hay calificaciones
- Armaduras Planas: Estática Aplicada Sistemas de Fuerzas CoplanaresDocumento32 páginasArmaduras Planas: Estática Aplicada Sistemas de Fuerzas CoplanaresMagda RodriguezAún no hay calificaciones
- Capitulo 15Documento40 páginasCapitulo 15Ricardo OrtizAún no hay calificaciones
- 3.1.-Armaduras PlanasDocumento6 páginas3.1.-Armaduras PlanasCesar LopezAún no hay calificaciones
- EstructurasDocumento4 páginasEstructurasGary RamosAún no hay calificaciones
- Estatica-RETICULADOSDocumento36 páginasEstatica-RETICULADOSAnonymous oUTATXiAún no hay calificaciones
- 5-a-CUERPOS VINCULADOS REVISION 2015Documento26 páginas5-a-CUERPOS VINCULADOS REVISION 2015LeandroAún no hay calificaciones
- Análisis de armaduras planasDocumento20 páginasAnálisis de armaduras planasFisher SotomayorAún no hay calificaciones
- Trabajo Practico N°6: Nombre: Ferrero Iván. Curso: 6°1° ConstruccionesDocumento15 páginasTrabajo Practico N°6: Nombre: Ferrero Iván. Curso: 6°1° ConstruccionesIvan FerreroAún no hay calificaciones
- Practicos 2022-TPNº4Documento13 páginasPracticos 2022-TPNº4Ruben VarelaAún no hay calificaciones
- Análisis cinemático de sistemas estructuralesDocumento25 páginasAnálisis cinemático de sistemas estructuralesLuis Del CastilloAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- Notas de Clase - Catedra TDC - 09 - Teoria de La RelatividadDocumento23 páginasNotas de Clase - Catedra TDC - 09 - Teoria de La RelatividadJosé FloresAún no hay calificaciones
- Edificio Champlain Tower South: Análisis del colapso progresivoDocumento48 páginasEdificio Champlain Tower South: Análisis del colapso progresivoJosé FloresAún no hay calificaciones
- Resistencia y Fractura HormigonDocumento14 páginasResistencia y Fractura HormigonJosé FloresAún no hay calificaciones
- Ingeniería Civil: Resistencia de MaterialesDocumento236 páginasIngeniería Civil: Resistencia de MaterialesJosé Flores100% (1)
- Solución Parcial Análisis Matemático 1Documento3 páginasSolución Parcial Análisis Matemático 1José FloresAún no hay calificaciones
- Acueductos: Métodos de Estimación de La Población FuturaDocumento15 páginasAcueductos: Métodos de Estimación de La Población FuturaLorena Prieto UrreaAún no hay calificaciones
- Cuestionario de GradoDocumento3 páginasCuestionario de GradoKeerly LlanoAún no hay calificaciones
- Cómo sumar y restar fracciones con diferentes denominadoresDocumento13 páginasCómo sumar y restar fracciones con diferentes denominadoresMERY OBANDO33% (3)
- Calculo Diferencial ProfundizacionDocumento15 páginasCalculo Diferencial ProfundizacionGiovanito MoralesAún no hay calificaciones
- RM Cáceres Nombramiento Capitulo 1 PDFDocumento12 páginasRM Cáceres Nombramiento Capitulo 1 PDFprofewilfredo26Aún no hay calificaciones
- Planificación de Matemáticas 5° GradoDocumento1 páginaPlanificación de Matemáticas 5° GradoJohn F. RodzAún no hay calificaciones
- Operaciones de Multiplicacion y Division de Un Polinomio II 2do.Documento3 páginasOperaciones de Multiplicacion y Division de Un Polinomio II 2do.Juantobias SanchezAún no hay calificaciones
- Practico 2Documento3 páginasPractico 2Roberto RamirezAún no hay calificaciones
- Matematicas Raz MateDocumento8 páginasMatematicas Raz MateRaul MartinezAún no hay calificaciones
- Teorías Del Origen de La Vida y Del UniversoDocumento8 páginasTeorías Del Origen de La Vida y Del UniversoBernabela Cuello GomezAún no hay calificaciones
- Ejemplo de Trigonometría BásicaDocumento34 páginasEjemplo de Trigonometría BásicaNoe DmAún no hay calificaciones
- Boletín Paes 2015 MatematicaDocumento27 páginasBoletín Paes 2015 MatematicaMario RuizAún no hay calificaciones
- EspaciosVectorialesDocumento14 páginasEspaciosVectorialesJose VeronaAún no hay calificaciones
- Unit 9 - Exercises and Word Problems (Functions)Documento9 páginasUnit 9 - Exercises and Word Problems (Functions)bemdasAún no hay calificaciones
- Práctica Dirigida 9Documento2 páginasPráctica Dirigida 9ZAVY STHEFANY CHAPONAN RAMIREZAún no hay calificaciones
- Curvas de carreteraDocumento4 páginasCurvas de carreteraClisman MontañoAún no hay calificaciones
- 200611A - 954 - Tarea - 1 - Armando ToroDocumento13 páginas200611A - 954 - Tarea - 1 - Armando Torojuan carlos aguilar diazAún no hay calificaciones
- Nuevo paradigma epistemológico de la ciencia en las ciencias socialesDocumento15 páginasNuevo paradigma epistemológico de la ciencia en las ciencias socialesMirian CastilloAún no hay calificaciones
- Guia Gabinete 2 - Algoritmos y ProgramacionDocumento4 páginasGuia Gabinete 2 - Algoritmos y Programacionpirata333Aún no hay calificaciones
- Símbolos matemáticosDocumento8 páginasSímbolos matemáticosArmando MaquinAún no hay calificaciones
- 3 SumadoresDocumento25 páginas3 SumadoresoveAún no hay calificaciones
- Generación de Números Aleatorios para SimulaciónDocumento34 páginasGeneración de Números Aleatorios para SimulaciónCarlos Francisco TrujilloAún no hay calificaciones
- BIOESTADISTICA (Modificado)Documento3 páginasBIOESTADISTICA (Modificado)isaac pinedaAún no hay calificaciones
- Deber - 3.2 Fundamentos MatemáticosDocumento3 páginasDeber - 3.2 Fundamentos MatemáticosBryan JimenezAún no hay calificaciones
- Cuestionario Previo 7 Diseño Digital FI UNAMDocumento3 páginasCuestionario Previo 7 Diseño Digital FI UNAMPandaAún no hay calificaciones
- 3.2 Definicion de Limite de Una FuncionDocumento7 páginas3.2 Definicion de Limite de Una FuncionChavez nabor David pabloAún no hay calificaciones