También podría gustarte
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Informe Cerchas Compuestas y ComplejasDocumento16 páginasInforme Cerchas Compuestas y ComplejasThalía M Zelada67% (3)
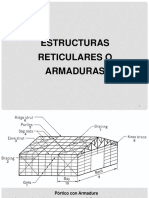
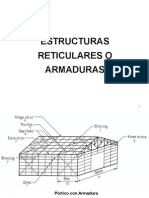
- Estructuras Reticulares o ArmadurasDocumento51 páginasEstructuras Reticulares o ArmadurasJ Rivera Alfaro100% (2)
- Armaduras, Bastidores y MaquinasDocumento40 páginasArmaduras, Bastidores y MaquinasJefry Paredes79% (14)
- File 1821935772Documento25 páginasFile 1821935772LeonardoSilva100% (1)
- 3 Sistemas de Ecuaciones LinealesDocumento45 páginas3 Sistemas de Ecuaciones LinealesCESAR ALEJANDRO INZUNSA DIAZAún no hay calificaciones
- Cerchas NRGDocumento27 páginasCerchas NRGRicardo Aguilar100% (1)
- Condensacion de La Matriz de Rigidez 2Documento35 páginasCondensacion de La Matriz de Rigidez 2Alejandra Briones MartinezAún no hay calificaciones
- Estructuras Reticulares o ArmadurasDocumento51 páginasEstructuras Reticulares o ArmadurasJosé Alexis FaIse Salas SoteloAún no hay calificaciones
- Material Semana 1 - Reticulados de MaderaDocumento13 páginasMaterial Semana 1 - Reticulados de Maderagaston ozzuna100% (4)
- Condensacion de La Matriz de RigidezDocumento11 páginasCondensacion de La Matriz de RigidezKarlita Denisse CampoverdeAún no hay calificaciones
- Reticulados 2012Documento18 páginasReticulados 2012SahaquielAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Material Semana 1 - Calculo de ReticuladosDocumento19 páginasMaterial Semana 1 - Calculo de Reticuladosgaston ozzuna100% (1)
- ArmadurasDocumento20 páginasArmadurasVanny HR100% (2)
- Armaduras y Metodo de Nodos y de SeccionesDocumento5 páginasArmaduras y Metodo de Nodos y de SeccionesCesar Flores100% (1)
- Ecuaciones Diferenciales (Ricardo Faro) PDFDocumento833 páginasEcuaciones Diferenciales (Ricardo Faro) PDFJhon Bejar100% (1)
- Unidad 08Documento25 páginasUnidad 08SERGIO7-SAún no hay calificaciones
- Unidad 7 - Reticulados Planos y EspacialesDocumento25 páginasUnidad 7 - Reticulados Planos y EspacialesJosé FloresAún no hay calificaciones
- Estructuras ReticularDocumento49 páginasEstructuras Reticularmarher26Aún no hay calificaciones
- ArmadurasDocumento17 páginasArmadurasivan hernandezAún no hay calificaciones
- Estructuras Reticulares-ArmadurasDocumento38 páginasEstructuras Reticulares-ArmadurasANGIE NICOLLS RAMIREZ IDRUGOAún no hay calificaciones
- Reticulados PlanosDocumento7 páginasReticulados PlanosrubinchissAún no hay calificaciones
- TeoriaEstructuras TEMAIV-1 CelosiasPlanasDocumento20 páginasTeoriaEstructuras TEMAIV-1 CelosiasPlanasManu GimenezAún no hay calificaciones
- Unidad 5.4a - Cálculos Cerchas (Subrayada)Documento19 páginasUnidad 5.4a - Cálculos Cerchas (Subrayada)Miguel Angel Alvarado RodriguezAún no hay calificaciones
- APUNTES 06 ReticuladosDocumento8 páginasAPUNTES 06 ReticuladosGonzalo BattistiAún no hay calificaciones
- Reticulados 2016Documento28 páginasReticulados 20161erodeelectro2022Aún no hay calificaciones
- Armaduras Isostaticas Articuladas JuanDocumento15 páginasArmaduras Isostaticas Articuladas JuanKelly LopezAún no hay calificaciones
- Estatica-RETICULADOSDocumento36 páginasEstatica-RETICULADOSMilenko BarreraAún no hay calificaciones
- Reticula DosDocumento19 páginasReticula DosSak Inga ParionaAún no hay calificaciones
- Aplicación de Los Vectores A LaingenieriaDocumento23 páginasAplicación de Los Vectores A LaingenieriaGary Chavez VasquezAún no hay calificaciones
- Elementos Estructurales en Armaduras PlanasDocumento8 páginasElementos Estructurales en Armaduras PlanasJosseph GuerreroAún no hay calificaciones
- 2º Informe R2Documento30 páginas2º Informe R2anthony_24_1994Aún no hay calificaciones
- RESUMENDocumento8 páginasRESUMENsebastian caperaAún no hay calificaciones
- Estructuras Reticulares PDFDocumento30 páginasEstructuras Reticulares PDFSean Torres100% (1)
- ARMADURASDocumento30 páginasARMADURASAnthony Paredes DelgadilloAún no hay calificaciones
- ArmadurasDocumento19 páginasArmadurasAlex Junior Rodriguez BarranzuelaAún no hay calificaciones
- Unidad IV - Cadenas CinematicasDocumento9 páginasUnidad IV - Cadenas CinematicasAlejandro Daniel Insaurralde100% (1)
- Armaduras Planas: Estática Aplicada Sistemas de Fuerzas CoplanaresDocumento32 páginasArmaduras Planas: Estática Aplicada Sistemas de Fuerzas CoplanaresMagda RodriguezAún no hay calificaciones
- Trabajo Practico N°6: Nombre: Ferrero Iván. Curso: 6°1° ConstruccionesDocumento15 páginasTrabajo Practico N°6: Nombre: Ferrero Iván. Curso: 6°1° ConstruccionesIvan FerreroAún no hay calificaciones
- Trabajo de CerchasDocumento7 páginasTrabajo de CerchasjoseAún no hay calificaciones
- Armaduras 3Documento19 páginasArmaduras 3Jhordan GoetendiaAún no hay calificaciones
- Reticula Do 1Documento5 páginasReticula Do 1Carlos ParedesAún no hay calificaciones
- Nudos Articulados-Cerchas (UPC)Documento38 páginasNudos Articulados-Cerchas (UPC)Daph PaAún no hay calificaciones
- Capitulo 4.-Estructuras ArticuladasDocumento22 páginasCapitulo 4.-Estructuras ArticuladasJosè Luis Cortés TorresAún no hay calificaciones
- Veridico Teorema CastiglianoDocumento26 páginasVeridico Teorema CastiglianoSánchez MaemAún no hay calificaciones
- EstructurasDocumento4 páginasEstructurasGary RamosAún no hay calificaciones
- Material Semana 1 - Reticulados de MaderaDocumento12 páginasMaterial Semana 1 - Reticulados de MaderaDavid HeraldoAún no hay calificaciones
- Propiedades de Las CerchasDocumento5 páginasPropiedades de Las CerchasKefryBetancourtAún no hay calificaciones
- Redaccion Mono ReticuladosDocumento10 páginasRedaccion Mono ReticuladosEnrique ChungaAún no hay calificaciones
- 3.1.-Armaduras PlanasDocumento6 páginas3.1.-Armaduras PlanasCesar LopezAún no hay calificaciones
- CELOSIA NDocumento2 páginasCELOSIA NCielo Yaneth CabelloAún no hay calificaciones
- Estatica 10a Ed. - Hibbeler by LeaA - 260Documento16 páginasEstatica 10a Ed. - Hibbeler by LeaA - 260Carlos Troncoso SanhuezaAún no hay calificaciones
- Practica I-Estructuras CristalinasDocumento18 páginasPractica I-Estructuras Cristalinasmario alexisAún no hay calificaciones
- Mecánica de Materiales - Portico - MarcosDocumento7 páginasMecánica de Materiales - Portico - MarcosRoger Ignacio Alamilla PechAún no hay calificaciones
- Tensor trifocal: Explorando la profundidad, el movimiento y la estructura en visión por computadoraDe EverandTensor trifocal: Explorando la profundidad, el movimiento y la estructura en visión por computadoraAún no hay calificaciones
- Bipolos Pasivos ANALISISDocumento4 páginasBipolos Pasivos ANALISISERIAún no hay calificaciones
- 9.2. - Métodos de Medida de La Resistencia de Tierra. - IEI05. - Montaje de Las Puestas A TierraDocumento2 páginas9.2. - Métodos de Medida de La Resistencia de Tierra. - IEI05. - Montaje de Las Puestas A TierraERIAún no hay calificaciones
- Formulario Mec 317 Primer ParcialDocumento1 páginaFormulario Mec 317 Primer ParcialERIAún no hay calificaciones
- Blog de Experimentación - Medicion de La Frecuencia de Resonancia de Un Circuito Bobina - CondensadorDocumento8 páginasBlog de Experimentación - Medicion de La Frecuencia de Resonancia de Un Circuito Bobina - CondensadorERIAún no hay calificaciones
- Medidores de Campo Magnético o Gaussímetros Digitales - Dagatron - EsDocumento1 páginaMedidores de Campo Magnético o Gaussímetros Digitales - Dagatron - EsERIAún no hay calificaciones
- Ejercicios ResueltosDocumento2 páginasEjercicios ResueltosERIAún no hay calificaciones
- SOLUCION - MATHCAD 5 UmsaDocumento5 páginasSOLUCION - MATHCAD 5 UmsaERIAún no hay calificaciones
- Guía de Laboratorio Medidas Electricas I-2019 PDFDocumento10 páginasGuía de Laboratorio Medidas Electricas I-2019 PDFERIAún no hay calificaciones
- Practica 2Documento4 páginasPractica 2ERIAún no hay calificaciones
- Practica Resis 2Documento4 páginasPractica Resis 2ERIAún no hay calificaciones
- 1er Examen Parcial de Calculo Diferencial 2023Documento4 páginas1er Examen Parcial de Calculo Diferencial 2023Pablo Recinos de BritoAún no hay calificaciones
- Red Magisterial Planeacion MateDocumento10 páginasRed Magisterial Planeacion MateKeren Areli Ariel NatanaelAún no hay calificaciones
- Ecuacionesdiferencialesgpo2 (Exactas) 1 PDFDocumento2 páginasEcuacionesdiferencialesgpo2 (Exactas) 1 PDFAnonymous 2nFLgFpyAún no hay calificaciones
- Problemas de Dinamica de Sistemas MecanicosDocumento8 páginasProblemas de Dinamica de Sistemas MecanicosSarita UrreaAún no hay calificaciones
- MatricesDocumento25 páginasMatricesAmIn20122Aún no hay calificaciones
- Calculadora Grafica HP 50gDocumento8 páginasCalculadora Grafica HP 50gHumam Abou Dehen100% (1)
- Guía Ecuaciones Diferenciales Verano 2020 PDFDocumento93 páginasGuía Ecuaciones Diferenciales Verano 2020 PDFZeus CancimanceAún no hay calificaciones
- Ecuaciones Diferenciales Practico 6Documento5 páginasEcuaciones Diferenciales Practico 6Alejandro LunaAún no hay calificaciones
- Unidad II Carga AxialDocumento4 páginasUnidad II Carga AxialMoises Nolasco GarciaAún no hay calificaciones
- Método de Elementos FinitosDocumento39 páginasMétodo de Elementos FinitosRicardo PanimbosaAún no hay calificaciones
- Mate FinalDocumento20 páginasMate FinalMaJo MoralesAún no hay calificaciones
- Explicacion de Series de FourierDocumento87 páginasExplicacion de Series de FourierDavid HillAún no hay calificaciones
- Ecuacion de Cauchy EulerDocumento3 páginasEcuacion de Cauchy EulerDaniela Villada ArboledaAún no hay calificaciones
- Teoria de Vareacion de Parametro: IntroducciónDocumento5 páginasTeoria de Vareacion de Parametro: IntroducciónJolsen G-cAún no hay calificaciones
- Guia Informe TecnicoDocumento12 páginasGuia Informe TecnicoGonzaloAún no hay calificaciones
- Plan Mensual de Desarrollo Curricular UesDocumento28 páginasPlan Mensual de Desarrollo Curricular UesDaniel Rodriguez SerrudoAún no hay calificaciones
- Trabajo de AntisismicaDocumento13 páginasTrabajo de AntisismicanoraAún no hay calificaciones
- Acv RM 2018 2Documento9 páginasAcv RM 2018 2Chiharu Yamete KudasaiAún no hay calificaciones
- Simulacro PreCalculoTADocumento8 páginasSimulacro PreCalculoTAandrey pradoAún no hay calificaciones
- Experimento de ChladniDocumento6 páginasExperimento de ChladniMartn Correa0% (1)
- LABORATORIO No. 9 COEFICIENTES DE DESCARGA (CD), VELOCIDAD (CV) Y CONTRACCIÓN (CC), EN UN ORIFICIO DE PARED DELGADA PDFDocumento17 páginasLABORATORIO No. 9 COEFICIENTES DE DESCARGA (CD), VELOCIDAD (CV) Y CONTRACCIÓN (CC), EN UN ORIFICIO DE PARED DELGADA PDFronalAún no hay calificaciones
- Trabajo - Ecuaciones Inexactas 1Documento18 páginasTrabajo - Ecuaciones Inexactas 1elviscivilAún no hay calificaciones
- Syllabus Matematicas IDocumento5 páginasSyllabus Matematicas ICesar A Hernandez HAún no hay calificaciones
- Capítulo #6 JACDocumento32 páginasCapítulo #6 JACAnderson TovarAún no hay calificaciones
- C OmpuertasDocumento3 páginasC OmpuertasByron Vladimir ArévaloAún no hay calificaciones
- Open Channel FlowDocumento12 páginasOpen Channel FlowOscar RamónAún no hay calificaciones
- 1 Segundo ParcialDocumento4 páginas1 Segundo ParcialCristy GaonaAún no hay calificaciones
- 6° Grado - Experiencia de Aprendizaje N°05Documento30 páginas6° Grado - Experiencia de Aprendizaje N°05Edith Vasquez JanampaAún no hay calificaciones