También podría gustarte
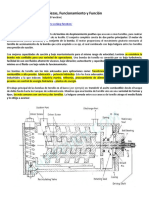
- Bombas de Tornillo - Sus Piezas - Funcionamiento y FunciónDocumento7 páginasBombas de Tornillo - Sus Piezas - Funcionamiento y FunciónRicardo ViloriaAún no hay calificaciones
- Sistemas Mecánicos LDocumento10 páginasSistemas Mecánicos LJuan Francisco Bautista MartinezAún no hay calificaciones
- SEM 14 - Estrategías de MantenimientoDocumento65 páginasSEM 14 - Estrategías de MantenimientoFabiola EstradaAún no hay calificaciones
- Valvuls Bop SebromencaDocumento30 páginasValvuls Bop SebromencaFranciaAún no hay calificaciones
- Guia 1 - Periodo 3 2021 QUINTO GRADODocumento3 páginasGuia 1 - Periodo 3 2021 QUINTO GRADOScarbonell PlayAún no hay calificaciones
- Conceptos Generales de Los Sistemas MecánicosDocumento16 páginasConceptos Generales de Los Sistemas MecánicosJT Hidalgo Rz80% (25)
- Evaluacion Final Matematicas 5o PrimariaDocumento7 páginasEvaluacion Final Matematicas 5o PrimariaRamirez Diaz Karla Leticia 17FUA0003DAún no hay calificaciones
- Introduccion-al-Mantenimiento UTCH PDFDocumento86 páginasIntroduccion-al-Mantenimiento UTCH PDFIngeniero BolMo100% (2)
- Manual de Selección, Uso y Mantenimiento de CompresoresDocumento298 páginasManual de Selección, Uso y Mantenimiento de CompresoresEDINSON85% (26)
- Termoplasticosporextrusion 200 PagsDocumento137 páginasTermoplasticosporextrusion 200 PagsFlavia SobreroAún no hay calificaciones
- Lista de Precios Industrial Legrand 2022-02Documento108 páginasLista de Precios Industrial Legrand 2022-02Camilo HernandezAún no hay calificaciones
- Circuitos de DisparoDocumento3 páginasCircuitos de DisparoJuan CastroAún no hay calificaciones
- Micromaster 440 SiemensDocumento316 páginasMicromaster 440 SiemensGustavo BalderramaAún no hay calificaciones
- Proceso Pelicula SopladaDocumento23 páginasProceso Pelicula SopladaFer AgAún no hay calificaciones
- Ficha Inversores EconotecniaDocumento6 páginasFicha Inversores EconotecniaFJGV7Aún no hay calificaciones
- Como Instalar Virtual FloppyDocumento4 páginasComo Instalar Virtual FloppyJosie Kelly Belen0% (1)
- Powerflex 70Documento206 páginasPowerflex 70Daniel Lazo PallautaAún no hay calificaciones
- Buenas prácticas en lubricación para gestión de activosDocumento23 páginasBuenas prácticas en lubricación para gestión de activosCristian A'cAún no hay calificaciones
- ControlLogix - Historial de Revisión de Paquetes de Firmware de RedundanciaDocumento30 páginasControlLogix - Historial de Revisión de Paquetes de Firmware de RedundanciaPaul Ramos CarcaustoAún no hay calificaciones
- Vectores y Superficies. Funciones VectorialesDocumento32 páginasVectores y Superficies. Funciones VectorialesPeter Vallejo67% (3)
- Ti-3000jx User Manual SpanishDocumento7 páginasTi-3000jx User Manual SpanishLeonardoMartinAún no hay calificaciones
- SoftExpert Mantenimiento: Maximice el ciclo de vida de sus activos con menos deDocumento2 páginasSoftExpert Mantenimiento: Maximice el ciclo de vida de sus activos con menos deCLARIBETH NAYDU RODRIGUEZ PENAAún no hay calificaciones
- A - Semiconductores PDFDocumento23 páginasA - Semiconductores PDFHector InbacuanAún no hay calificaciones
- Aplicacion de RCMDocumento4 páginasAplicacion de RCMKaren AguinagaAún no hay calificaciones
- PP Control Optimo 2Documento374 páginasPP Control Optimo 2jroyal692974Aún no hay calificaciones
- Lubricacion Extrusoras PDFDocumento117 páginasLubricacion Extrusoras PDFjroyal69Aún no hay calificaciones
- RS LinxDocumento7 páginasRS LinxJorgeaaaAún no hay calificaciones
- ML Volumen 1 N 5 PDFDocumento32 páginasML Volumen 1 N 5 PDFJuan Carlos Orrego BarreraAún no hay calificaciones
- Bolsac Bolpac Mexican Capprevio A EdMDocumento19 páginasBolsac Bolpac Mexican Capprevio A EdMMauricio Cuper DianderasAún no hay calificaciones
- Foro Reciclaje de Los Residuos Plastico y La Proteccion Del Medio AmbienteDocumento80 páginasForo Reciclaje de Los Residuos Plastico y La Proteccion Del Medio AmbienteMINEXPONAún no hay calificaciones
- Introducción a la ingeniería de mantenimiento: conceptos básicos, activos, gestión del mantenimiento y normasDocumento50 páginasIntroducción a la ingeniería de mantenimiento: conceptos básicos, activos, gestión del mantenimiento y normasKevin FloresAún no hay calificaciones
- Kit Completo Servo Chino PDFDocumento1 páginaKit Completo Servo Chino PDFalguifarroAún no hay calificaciones
- Diplomado en Gestion de MantenimientoDocumento7 páginasDiplomado en Gestion de MantenimientomackyyoAún no hay calificaciones
- 1 Arrancar A Prueba de Fallos en Windows 8Documento2 páginas1 Arrancar A Prueba de Fallos en Windows 8adrianosorioAún no hay calificaciones
- Clase 4 RodamientosDocumento48 páginasClase 4 RodamientosLaura Patricia JineteAún no hay calificaciones
- RESOLUCIONES 3495 Y 537 ANEXO TÉCNICO 2 LISTA TABULAR TRAZABILIDADDocumento1846 páginasRESOLUCIONES 3495 Y 537 ANEXO TÉCNICO 2 LISTA TABULAR TRAZABILIDADCarito Duenas OrozcoAún no hay calificaciones
- Software RsLinx ClassicDocumento13 páginasSoftware RsLinx ClassicDayner SarricoleaAún no hay calificaciones
- Mantenimiento Preventivo Correctivo y PredictivoDocumento14 páginasMantenimiento Preventivo Correctivo y PredictivoadanjodoAún no hay calificaciones
- Tesis 10 PDFDocumento77 páginasTesis 10 PDFkemetvictAún no hay calificaciones
- FMS 200Documento26 páginasFMS 200manugphondaAún no hay calificaciones
- TPM (Mantenimiento Productivo Total)Documento7 páginasTPM (Mantenimiento Productivo Total)Lizz DíazAún no hay calificaciones
- 07 - Remote Manager PDFDocumento6 páginas07 - Remote Manager PDFEva SuárezAún no hay calificaciones
- Fundamentos de ISO 20000Documento14 páginasFundamentos de ISO 20000alejandroherrera22Aún no hay calificaciones
- Evaluación Técnica de Alternativas para El Reciclaje y Reutilización de Los Empaques Laminados de Polipropileno y Polipropileno Metalizado.Documento280 páginasEvaluación Técnica de Alternativas para El Reciclaje y Reutilización de Los Empaques Laminados de Polipropileno y Polipropileno Metalizado.Andres Velez100% (1)
- Propuesta plan mantenimiento RCM línea pilotoDocumento61 páginasPropuesta plan mantenimiento RCM línea pilotoJesdalAún no hay calificaciones
- Protocolo RS 485Documento4 páginasProtocolo RS 485Donaldo Donado DAún no hay calificaciones
- Plan Mantenimiento PREVENTIVO 111Documento27 páginasPlan Mantenimiento PREVENTIVO 111Franklin Vinicio ShagñayAún no hay calificaciones
- Jerarquización probabilística de activosDocumento10 páginasJerarquización probabilística de activosHernando Gonzalez ArdilaAún no hay calificaciones
- Desarrollo de Empaque 2015Documento151 páginasDesarrollo de Empaque 2015samuelpacahualaAún no hay calificaciones
- Links Windows 7, 8.1 y 10 x86 x64Documento2 páginasLinks Windows 7, 8.1 y 10 x86 x64JoseAdrianQuintero100% (1)
- GM 2Documento78 páginasGM 2EDITORAún no hay calificaciones
- Cyclo 6000-Sumitomo-Motorreductores ACDocumento3 páginasCyclo 6000-Sumitomo-Motorreductores ACPako XrossAún no hay calificaciones
- FT-Ficha Técnica PDFDocumento1 páginaFT-Ficha Técnica PDFJuancho PanAún no hay calificaciones
- Analisis Del ProductoDocumento7 páginasAnalisis Del ProductoNatalia Andrea GONZALEZ ZULETAAún no hay calificaciones
- El Analisis Causa Raiz Estrategia de Con PDFDocumento12 páginasEl Analisis Causa Raiz Estrategia de Con PDFFelipe SandovalAún no hay calificaciones
- Introducción Teoria de MantenimientosDocumento30 páginasIntroducción Teoria de MantenimientoslisbeitAún no hay calificaciones
- Requisitos para el mantenimiento de equiposDocumento22 páginasRequisitos para el mantenimiento de equiposMaría CamilaAún no hay calificaciones
- Manual Maquina de Soldar Miller PDFDocumento72 páginasManual Maquina de Soldar Miller PDFIiys Mtto IndustrialAún no hay calificaciones
- Polietileno - Trab. MaterialesDocumento26 páginasPolietileno - Trab. MaterialesRoimer Smit Rafael FernandezAún no hay calificaciones
- TwinCAT 3Documento5 páginasTwinCAT 3jrivas31119Aún no hay calificaciones
- RC 301 Web 2011Documento1 páginaRC 301 Web 2011Jimmy Salazar TapiaAún no hay calificaciones
- MantenimientoDocumento214 páginasMantenimientoDarwin Farinango100% (1)
- Tarea #01Documento15 páginasTarea #01Arquimedes Juarez SaavedraAún no hay calificaciones
- Elaboracion Del Proyecto TécnicoDocumento7 páginasElaboracion Del Proyecto TécnicoBenito CarmeloAún no hay calificaciones
- Transmisión de Potencia.Documento16 páginasTransmisión de Potencia.Jesus Alejandro Velandia MarquinaAún no hay calificaciones
- Caracterización de Materiales Alternativos para Frenos de FricciónDocumento6 páginasCaracterización de Materiales Alternativos para Frenos de FricciónJohan MayaAún no hay calificaciones
- Cata 0688 (E SG 040 01)Documento6 páginasCata 0688 (E SG 040 01)Lucas LamasAún no hay calificaciones
- Control y Prevencion de Riesgos en FundicionesDocumento68 páginasControl y Prevencion de Riesgos en FundicionesguillermoAún no hay calificaciones
- Catalogo de Electrodos ESAB COMARCODocumento12 páginasCatalogo de Electrodos ESAB COMARCOmark1908Aún no hay calificaciones
- Lab 7. Informe de Laboratorio Mecánica de FluidosDocumento9 páginasLab 7. Informe de Laboratorio Mecánica de FluidosNicolás AndradeAún no hay calificaciones
- Levantamiento topográfico por radiación en la Universidad Nacional de CajamarcaDocumento11 páginasLevantamiento topográfico por radiación en la Universidad Nacional de CajamarcaDanicsa Maza Idrogo50% (2)
- Practica No. 4 SaponificacionDocumento8 páginasPractica No. 4 SaponificacionRocíoVerásteguiParedesAún no hay calificaciones
- LABORATORIO 06 LEYES DE KIRCHHOFF KatmkarenDocumento41 páginasLABORATORIO 06 LEYES DE KIRCHHOFF KatmkarenWilfredo Torres PacherresAún no hay calificaciones
- 1 Cuestionario Cambios Físicos GeneralDocumento4 páginas1 Cuestionario Cambios Físicos GeneralMIRIAM DEYSI BAUTISTA LOPEZAún no hay calificaciones
- Automatización en El Sector AutomotrizDocumento3 páginasAutomatización en El Sector AutomotrizMumulAún no hay calificaciones
- TALLER Grupal 06 CostosDocumento7 páginasTALLER Grupal 06 CostosJair0% (1)
- Ejercicios 1,2y3Documento11 páginasEjercicios 1,2y3Lorena ZamudioAún no hay calificaciones
- Experiment OsDocumento69 páginasExperiment OsLeonardo AlfaroAún no hay calificaciones
- El trasvase de oxígeno entre Hb y Mb gracias al hierro (FeDocumento6 páginasEl trasvase de oxígeno entre Hb y Mb gracias al hierro (FeCelia MartinezAún no hay calificaciones
- Tarea 9Documento2 páginasTarea 9Adilson EstebaAún no hay calificaciones
- Algoritmo para Cambiar La Clave de Activación de WindowsDocumento2 páginasAlgoritmo para Cambiar La Clave de Activación de WindowsMONICAAún no hay calificaciones
- Tarea 3 - (Y09213)Documento3 páginasTarea 3 - (Y09213)Lucas ValdezAún no hay calificaciones
- Moldes de marroquinería: Cómo calcular curvas y medidas con precisiónDocumento5 páginasMoldes de marroquinería: Cómo calcular curvas y medidas con precisiónGoalter PeñaAún no hay calificaciones
- Coordenadas PolaresDocumento6 páginasCoordenadas PolaresRuben BenitezAún no hay calificaciones
- Clases Trigonometria SanIgnacioDocumento9 páginasClases Trigonometria SanIgnacioALEX ATILIO PUENTE JARAAún no hay calificaciones
- El Ruido SoldaduraDocumento11 páginasEl Ruido SoldaduraGabriel SanchezAún no hay calificaciones
- Mantenimiento de Cámaras de Refrigeración y Congelación.Documento23 páginasMantenimiento de Cámaras de Refrigeración y Congelación.LuisAlbertoMartínezAún no hay calificaciones
- S1 - Taller de TeoríaDocumento3 páginasS1 - Taller de TeoríaMayte SalazarAún no hay calificaciones
- Estadística U: Sección 1Documento6 páginasEstadística U: Sección 1Andrés ElizaldeAún no hay calificaciones
- Examen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Documento32 páginasExamen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Gabriela Angélica Casas MattaAún no hay calificaciones
- Trabajo Laura AcevedoDocumento20 páginasTrabajo Laura AcevedoLAURA ISABELLA ACEVEDO QUINTEROAún no hay calificaciones
- Tarea de Estadistica para La Gestion Semana 4Documento8 páginasTarea de Estadistica para La Gestion Semana 4Olga Faundez Sanchez100% (1)
- Parámetros de ControlDocumento9 páginasParámetros de ControlSSAMCORAún no hay calificaciones
- 1 Problemas de Física. Tomo 3 (27a. Ed.) - (PG 14 - 58) Optica PDFDocumento45 páginas1 Problemas de Física. Tomo 3 (27a. Ed.) - (PG 14 - 58) Optica PDFYadira Fuentes50% (4)
- Resolución de problemas mediante representaciones lineales y enunciados con inversión de datosDocumento10 páginasResolución de problemas mediante representaciones lineales y enunciados con inversión de datosidanys basantaAún no hay calificaciones