También podría gustarte
- Estadística inferencial aplicadaDe EverandEstadística inferencial aplicadaCalificación: 5 de 5 estrellas5/5 (1)
- Mapa Conceptual Capitulo 21Documento2 páginasMapa Conceptual Capitulo 21ChristianRuizAldaveAún no hay calificaciones
- ESTADO DEL ARTE en Series de TiempoDocumento38 páginasESTADO DEL ARTE en Series de TiempoNatalia Gabriela Parra VásquezAún no hay calificaciones
- Presentación Outliers y FaltantesDocumento27 páginasPresentación Outliers y FaltantesDIANA MILENAAún no hay calificaciones
- Enamorate BienDocumento179 páginasEnamorate BienIsa Rojas50% (2)
- Juan Esteban Mera VillegasDocumento1 páginaJuan Esteban Mera Villegasbairon mera100% (1)
- Ecuación de Estado de Gases Ideales Con Cobra4Documento8 páginasEcuación de Estado de Gases Ideales Con Cobra4Elizabeth ChAún no hay calificaciones
- La Cadena de Valor en Un RestauranteDocumento9 páginasLa Cadena de Valor en Un RestauranteRoSs F SwiftAún no hay calificaciones
- PPT Unidad 01 Tema 04 2020 03 Matemática Financiera (2264) - DDocumento33 páginasPPT Unidad 01 Tema 04 2020 03 Matemática Financiera (2264) - DCristian Avalos SanchezAún no hay calificaciones
- Análisis de Series de Tiempo Univariadas: Mg. Heber Baldeón PaucarDocumento30 páginasAnálisis de Series de Tiempo Univariadas: Mg. Heber Baldeón PaucarAdrian Pedraza AquijeAún no hay calificaciones
- Series de TiempoDocumento50 páginasSeries de TiempoBrigida Tania Puma Velasquez0% (1)
- 4.econometría Financiera-Series de Tiempo DDocumento16 páginas4.econometría Financiera-Series de Tiempo DJose ZuñigaAún no hay calificaciones
- Clases13 14 Serie Tiempo1Documento43 páginasClases13 14 Serie Tiempo1Matías SilvaAún no hay calificaciones
- Resumen 3 Modelación EstadísticaDocumento4 páginasResumen 3 Modelación Estadísticabarbara.olaveacostaAún no hay calificaciones
- Modelos de PronósticosDocumento53 páginasModelos de PronósticosAlexis José GonzálezAún no hay calificaciones
- Principios de Econometria 10 1213023429535571 9Documento92 páginasPrincipios de Econometria 10 1213023429535571 9rodrigo_leonzAún no hay calificaciones
- Principios de Econometria 10 1213023429535571 9Documento92 páginasPrincipios de Econometria 10 1213023429535571 9irwingrsAún no hay calificaciones
- Clase04 Econometria2Documento100 páginasClase04 Econometria2Fiorella Alejandro Galvan100% (1)
- TEMA 11 - Introducción A La Econometría Financiera. Modelos ARCHDocumento34 páginasTEMA 11 - Introducción A La Econometría Financiera. Modelos ARCHROLLY VASQUEZAún no hay calificaciones
- Análisis en El Dominio Del Tiempo Procesos EstocasticosDocumento65 páginasAnálisis en El Dominio Del Tiempo Procesos EstocasticosJorge Luis Llanos TiznadoAún no hay calificaciones
- Box Jenkins y WintersDocumento6 páginasBox Jenkins y WintersergrAún no hay calificaciones
- Taller de Series de TiempoDocumento131 páginasTaller de Series de TiempoWendy SequeirosAún no hay calificaciones
- Series de TiempoDocumento35 páginasSeries de TiempoAlexis Escobar RodríguezAún no hay calificaciones
- Stata Int Sesion 1 PresentacionDocumento47 páginasStata Int Sesion 1 PresentacionPablo Hernán JucaAún no hay calificaciones
- 13-14 PPT MCPFDocumento31 páginas13-14 PPT MCPFMiguel MirandaAún no hay calificaciones
- TEMA 6 - Metodología Box-JenkinsDocumento28 páginasTEMA 6 - Metodología Box-JenkinsFabiola QPAún no hay calificaciones
- TEMA 6 - Metodología Box-JenkinsDocumento28 páginasTEMA 6 - Metodología Box-JenkinsRicardo RojasAún no hay calificaciones
- Diplo AA Capitulo 4d Predictive Analytics I Series de Tiempo 1Documento27 páginasDiplo AA Capitulo 4d Predictive Analytics I Series de Tiempo 1anpcAún no hay calificaciones
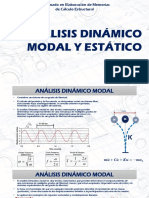
- Analisis Dinamico Modal y EstaticoDocumento15 páginasAnalisis Dinamico Modal y EstaticoRicardo SanchezAún no hay calificaciones
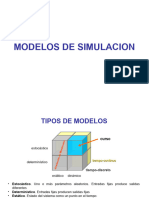
- Modelos de SimulacionDocumento29 páginasModelos de SimulacionPITER HUARILLOCLLAAún no hay calificaciones
- Introduccion A Los Modelos de PronosticosDocumento121 páginasIntroduccion A Los Modelos de PronosticosNancy Gonzalez100% (1)
- Suavizacion ExponencialDocumento121 páginasSuavizacion ExponencialLopez AlexisAún no hay calificaciones
- Foro de AprendizajeDocumento1 páginaForo de AprendizajeDavid CeliAún no hay calificaciones
- Modelo ArimaDocumento57 páginasModelo ArimaandreaAún no hay calificaciones
- Unidad 03Documento96 páginasUnidad 03Sebastian Pedraza RamirezAún no hay calificaciones
- Material Complementario - Estado Del Arte en Series de Tiempo (Pronosticos)Documento38 páginasMaterial Complementario - Estado Del Arte en Series de Tiempo (Pronosticos)Diego SalazarAún no hay calificaciones
- Minitab 17 Ava Sesion 7 ManualDocumento20 páginasMinitab 17 Ava Sesion 7 ManualmexalurgiaAún no hay calificaciones
- Analisis Macro - Tema 3.Documento14 páginasAnalisis Macro - Tema 3.Silvia Sanchez BuenoAún no hay calificaciones
- Clase 1 - Presentación de Curso y Resumen DerivadasDocumento11 páginasClase 1 - Presentación de Curso y Resumen DerivadasNICOLAS ESTEBAN LAGOS ARRIAGADAAún no hay calificaciones
- Tecnicas de Proyeccion de MercadoDocumento35 páginasTecnicas de Proyeccion de MercadoLUIS FERNANDO PAUL CENCIA DE LA CRUZAún no hay calificaciones
- Modelado y SimulaciónDocumento33 páginasModelado y SimulaciónSara Luz Villero ContrerasAún no hay calificaciones
- 01 IntroDocumento28 páginas01 IntroAlvaro Celis FernándezAún no hay calificaciones
- 4 - Métodos Autoproyectivos Estocásticos de PredicciónDocumento30 páginas4 - Métodos Autoproyectivos Estocásticos de PredicciónJUAN LUCIO ORTEGA TRIVEÑOAún no hay calificaciones
- TEMA 11 - Introducción A La Econometría Financiera. Modelos ARCH PDFDocumento34 páginasTEMA 11 - Introducción A La Econometría Financiera. Modelos ARCH PDFJoel AlarcónAún no hay calificaciones
- Econometría de Series de TiempoDocumento8 páginasEconometría de Series de TiempoMARCO NICOLAS MORENO MACHUCAAún no hay calificaciones
- 6 SIMULACIÓN - Simulación de Eventos Discretos - Francisco Muñoz PradoDocumento25 páginas6 SIMULACIÓN - Simulación de Eventos Discretos - Francisco Muñoz PradoTatiana MontoyaAún no hay calificaciones
- Presentacion MBA UAGRM-EstadísticaDocumento20 páginasPresentacion MBA UAGRM-EstadísticaCecilia Bejarano martinezAún no hay calificaciones
- Series TemporalesDocumento56 páginasSeries TemporalesIan Farah SalasAún no hay calificaciones
- 19 OAM Metodos-Estadísticos-De-Control-De-CalidadDocumento61 páginas19 OAM Metodos-Estadísticos-De-Control-De-CalidadSantiago JorgeAún no hay calificaciones
- Practicas Simulacion Msse ArenaDocumento55 páginasPracticas Simulacion Msse ArenaMarco AntonioAún no hay calificaciones
- HISTOGRAMADocumento20 páginasHISTOGRAMADayanneAún no hay calificaciones
- U 01 Modelado y Simulación de SistemasDocumento18 páginasU 01 Modelado y Simulación de SistemasMariafernanda Coronado FernándezAún no hay calificaciones
- Modelos de Pronósticos e Inventarios PresentaciónDocumento34 páginasModelos de Pronósticos e Inventarios PresentaciónDavid Osiris Fernandez Avalos100% (1)
- Conceptos Básicos de La Econometría FinancieraDocumento50 páginasConceptos Básicos de La Econometría FinancieraPaola Andrea Velasquez O100% (3)
- 01 IntroDocumento30 páginas01 IntroCarolina BecerraAún no hay calificaciones
- USIL LP S2 - Demanda IndependienteDocumento76 páginasUSIL LP S2 - Demanda IndependienteValerie HerreraAún no hay calificaciones
- Supuestos de MCO - S4 - MulticolinealidadDocumento9 páginasSupuestos de MCO - S4 - MulticolinealidadZeyda Valentina Navarro GonzalezAún no hay calificaciones
- Series de Tiempo - UnmsmDocumento114 páginasSeries de Tiempo - UnmsmAnderson Peralta PalaciosAún no hay calificaciones
- Introduc Estadistica Tema7Documento37 páginasIntroduc Estadistica Tema7Manuel RodríguezAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)
- ¿Cuándo Vendrá Nuestro Salvador Jesucristo Por Segunda Vez?Documento18 páginas¿Cuándo Vendrá Nuestro Salvador Jesucristo Por Segunda Vez?Toño FasanandoAún no hay calificaciones
- PDF 2020 S6 Intro A Machine LearningDocumento35 páginasPDF 2020 S6 Intro A Machine LearningToño FasanandoAún no hay calificaciones
- PDF 2020 S5 Análisis y Econometría EspacialDocumento26 páginasPDF 2020 S5 Análisis y Econometría EspacialToño FasanandoAún no hay calificaciones
- Práctica 3Documento2 páginasPráctica 3Toño FasanandoAún no hay calificaciones
- PDF 2020 S4 Series de TiempoDocumento36 páginasPDF 2020 S4 Series de TiempoToño FasanandoAún no hay calificaciones
- Práctica 2Documento2 páginasPráctica 2Toño FasanandoAún no hay calificaciones
- 2020 S2 Tratamiento y VisualizaciónDocumento21 páginas2020 S2 Tratamiento y VisualizaciónToño FasanandoAún no hay calificaciones
- Nota de Clase - Control Óptimo - Feb.14Documento14 páginasNota de Clase - Control Óptimo - Feb.14Toño FasanandoAún no hay calificaciones
- RD003 2019ef5001Documento15 páginasRD003 2019ef5001Gonzalo Ernesto Gallardo MorenoAún no hay calificaciones
- EV3 ProgDocumento22 páginasEV3 ProgToño FasanandoAún no hay calificaciones
- EV1 IntroDocumento14 páginasEV1 IntroToño FasanandoAún no hay calificaciones
- Preferencia ReveladaDocumento9 páginasPreferencia ReveladaToño FasanandoAún no hay calificaciones
- EV2 ObjetosDocumento20 páginasEV2 ObjetosMarin DavilaAún no hay calificaciones
- Solicitud - de - Prestaciones - Economicas 2019Documento3 páginasSolicitud - de - Prestaciones - Economicas 2019Yury Villarruel VargasAún no hay calificaciones
- BibliografíaDocumento1 páginaBibliografíaToño FasanandoAún no hay calificaciones
- Esta EscritoDocumento40 páginasEsta EscritoConexion AdventistaAún no hay calificaciones
- YPFBPresentAudienciaPublicaGestion2017Prog2018Pandorev6 PDFDocumento55 páginasYPFBPresentAudienciaPublicaGestion2017Prog2018Pandorev6 PDFmarco antonioAún no hay calificaciones
- Vandeman George - Lo Que Me Gusta de Tu ReligionDocumento61 páginasVandeman George - Lo Que Me Gusta de Tu ReligionalecloaiAún no hay calificaciones
- 3 Profecía de Daniel 11.Documento4 páginas3 Profecía de Daniel 11.Carlos Mendez GalvaAún no hay calificaciones
- 5 Minutos de SaludDocumento58 páginas5 Minutos de Saludgamaliel11100% (1)
- Zonadeocurrencia2000 2019Documento25 páginasZonadeocurrencia2000 2019Toño FasanandoAún no hay calificaciones
- Repaso Estad Stica MultivariadaDocumento13 páginasRepaso Estad Stica MultivariadaalticoruAún no hay calificaciones
- Declaracion SaludDocumento1 páginaDeclaracion SaludToño FasanandoAún no hay calificaciones
- Declaración Jurada de SaludDocumento1 páginaDeclaración Jurada de SaludToño FasanandoAún no hay calificaciones
- 008 - Historia de La Alimentacion - Anexo (Light)Documento4 páginas008 - Historia de La Alimentacion - Anexo (Light)Danko G. Valdes HurtadoAún no hay calificaciones
- FINAL ES - Laudato Si' Anniv Year 2020-2021Documento12 páginasFINAL ES - Laudato Si' Anniv Year 2020-2021Toño FasanandoAún no hay calificaciones
- DocTrabajo 01-2012-GEE V13 Propuesta Metodolog INDECOPI Xa MultasDocumento47 páginasDocTrabajo 01-2012-GEE V13 Propuesta Metodolog INDECOPI Xa MultasCarlo AlvaradoAún no hay calificaciones
- Apostasía Omega IASD 11°Documento14 páginasApostasía Omega IASD 11°Toño FasanandoAún no hay calificaciones
- Manual Guia AutocadDocumento74 páginasManual Guia AutocadAnonymous Qy5j1ixeAún no hay calificaciones
- AvisoDocumento1 páginaAvisoJosé Manuel Ortiz MorenoAún no hay calificaciones
- La SupervisiónDocumento11 páginasLa Supervisióngleimar perozaAún no hay calificaciones
- Estratificacion Del RiesgoDocumento23 páginasEstratificacion Del RiesgodanisalinasAún no hay calificaciones
- Investigacion Unidad 2Documento11 páginasInvestigacion Unidad 2luvia jazminAún no hay calificaciones
- Voladura de RocasDocumento56 páginasVoladura de RocasJuan Vargas AlmironAún no hay calificaciones
- DEBER 7 (Ejercicios Capítulo 34libro de Mankiw)Documento7 páginasDEBER 7 (Ejercicios Capítulo 34libro de Mankiw)Diego GuamanAún no hay calificaciones
- FyEP U1 AA1 Mercado Uveg OkDocumento6 páginasFyEP U1 AA1 Mercado Uveg OkKarla CargutieAún no hay calificaciones
- Memoria Descriptiva ''Ok''Documento10 páginasMemoria Descriptiva ''Ok''naysha ramos misaicoAún no hay calificaciones
- Parcial - Escenario 4 - SEGUNDO BLOQUE-TEORICO - PRACTICO - SISTEMAS DE INFORMACION EN GESTION LOGISTICA - (GRUPO2)Documento8 páginasParcial - Escenario 4 - SEGUNDO BLOQUE-TEORICO - PRACTICO - SISTEMAS DE INFORMACION EN GESTION LOGISTICA - (GRUPO2)Sofia2012Aún no hay calificaciones
- Medicion Del Atractivo de Los SegmentosDocumento18 páginasMedicion Del Atractivo de Los SegmentosDara VargasAún no hay calificaciones
- Ee s06.s6 ActividadesDocumento9 páginasEe s06.s6 ActividadesRetdor 1290Aún no hay calificaciones
- Caso 3 2023Documento4 páginasCaso 3 2023Yamileth TorpocoAún no hay calificaciones
- Cubrebocas en Tiempos de Pandemia, Revisión Histórica, Científica Y Recomendaciones PrácticasDocumento19 páginasCubrebocas en Tiempos de Pandemia, Revisión Histórica, Científica Y Recomendaciones PrácticasLaura Lucia Tellez RojasAún no hay calificaciones
- FASE 4 Proyecto de Ingeniería 2Documento7 páginasFASE 4 Proyecto de Ingeniería 2ILeanaQuirozPonceAún no hay calificaciones
- Presentación1 PYMEDocumento7 páginasPresentación1 PYMETomas Enrique Tovio GuerraAún no hay calificaciones
- 10-2-3 2 Actualizaciones A Los Documentos Del ProyectoDocumento4 páginas10-2-3 2 Actualizaciones A Los Documentos Del ProyectoCynth VillagranAún no hay calificaciones
- Dis - Infectan G Ficha Tecnica PDFDocumento3 páginasDis - Infectan G Ficha Tecnica PDFJhonAún no hay calificaciones
- Yamaha X-MAX 250 2014Documento5 páginasYamaha X-MAX 250 2014Alicante Motor YAMAHAAún no hay calificaciones
- Mvag 24 Desgaste Los Angeles Astm C 131 PDFDocumento9 páginasMvag 24 Desgaste Los Angeles Astm C 131 PDFLedy Ana Pernia CastroAún no hay calificaciones
- TraduccionDocumento7 páginasTraduccionKelly Maribel Moreno GuastiAún no hay calificaciones
- Actividad 3 CÁLCULO E INTERPRETACION DE INDICADORES FINANCIEROSDocumento10 páginasActividad 3 CÁLCULO E INTERPRETACION DE INDICADORES FINANCIEROSdavidmartha67% (12)
- Guia Centro Hemodialisis EspañaDocumento666 páginasGuia Centro Hemodialisis EspañaMárquez Yovera BrandoAún no hay calificaciones
- Necesidades Huamanas - MonografiaDocumento15 páginasNecesidades Huamanas - MonografiaJeicko Edgar Aliaga RojasAún no hay calificaciones
- Ejercicio Capitulo 6 Sociedad AnonimaDocumento14 páginasEjercicio Capitulo 6 Sociedad AnonimaLizeth ZepedaAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 6 - Primer Bloque-Ciencias Basicas - Virtual - Métodos Numéricos - (Grupo b02)Documento7 páginasActividad de Puntos Evaluables - Escenario 6 - Primer Bloque-Ciencias Basicas - Virtual - Métodos Numéricos - (Grupo b02)KAREN LICETH CLAVIJOAún no hay calificaciones