También podría gustarte
- Diagramas y Polifonías. Experiencias de PensamientoDe EverandDiagramas y Polifonías. Experiencias de PensamientoAún no hay calificaciones
- 04 Dinámica de La Partícula (GIE)Documento74 páginas04 Dinámica de La Partícula (GIE)CentipedeWormAún no hay calificaciones
- Resumen Lanzamiento de Un ProyectilDocumento2 páginasResumen Lanzamiento de Un ProyectilGuti BlogsAún no hay calificaciones
- Glosario EstáticaDocumento5 páginasGlosario EstáticaAdoFTP100% (1)
- 1.1-Estatica-Principios BasicosDocumento4 páginas1.1-Estatica-Principios Basicosobedot100% (5)
- Glosario de Estática (Vectores, Y Conversiones)Documento2 páginasGlosario de Estática (Vectores, Y Conversiones)Danny Gonzalez50% (2)
- Equilibrio Fisica 1Documento8 páginasEquilibrio Fisica 1Bichi Yal100% (1)
- La Física A Partir de NewtonDocumento11 páginasLa Física A Partir de NewtonMary MedinaAún no hay calificaciones
- 20098566-Transformaciones de GalileoDocumento3 páginas20098566-Transformaciones de GalileoryloqAún no hay calificaciones
- Mecánica RelativistaDocumento13 páginasMecánica Relativistakenya78Aún no hay calificaciones
- Ensayo de DinamicaDocumento5 páginasEnsayo de DinamicaDiego A. MartinezAún no hay calificaciones
- Sistemas de Referencia InercialesDocumento2 páginasSistemas de Referencia InercialesAlexGo GarcesAún no hay calificaciones
- 3era Ley de NewtonDocumento10 páginas3era Ley de NewtonAhumada Mares Miguel AngelAún no hay calificaciones
- Trabajo, Potencia y EnergíaDocumento16 páginasTrabajo, Potencia y EnergíaJhonatan CarranzaAún no hay calificaciones
- (Matematicas) Los Origenes de Las Teorias de Integracion Modernas (Thomas Hawkins) (MadMath)Documento41 páginas(Matematicas) Los Origenes de Las Teorias de Integracion Modernas (Thomas Hawkins) (MadMath)PePeeleAún no hay calificaciones
- Unidad 2 Mecanica de Materiales IIDocumento10 páginasUnidad 2 Mecanica de Materiales IIAdriana CalderonAún no hay calificaciones
- Equilibrio de Cuerpos RígidosDocumento5 páginasEquilibrio de Cuerpos RígidosAdrian Cuellar SampayoAún no hay calificaciones
- Las 3 leyes de Newton: Principio de inercia, dinámica y acción-reacciónDocumento2 páginasLas 3 leyes de Newton: Principio de inercia, dinámica y acción-reacciónFelipe Quiñones Paucar100% (1)
- Ley de CoulombDocumento17 páginasLey de CoulombjoseAún no hay calificaciones
- DINAMICA DE UNA pARTicula PDFDocumento53 páginasDINAMICA DE UNA pARTicula PDFJimmy LingAún no hay calificaciones
- Fuerzas - Sistemas de FuerzasDocumento5 páginasFuerzas - Sistemas de FuerzasFabricio RomanoAún no hay calificaciones
- Maquinas SimplesDocumento4 páginasMaquinas SimplesRAGNAROKX79Aún no hay calificaciones
- Física Dinamica Básica PsuDocumento12 páginasFísica Dinamica Básica PsuIgnacioGuilquirucaAún no hay calificaciones
- Energía cinética de cuerpos rígidosDocumento16 páginasEnergía cinética de cuerpos rígidosAmethyst SmithAún no hay calificaciones
- Semana 1 Impulso y Cantidad de MovimientoDocumento63 páginasSemana 1 Impulso y Cantidad de MovimientoPiero CubasAún no hay calificaciones
- Cinemática de Cuerpos RígidosDocumento6 páginasCinemática de Cuerpos RígidosCindy Omaira Ramirez LeivaAún no hay calificaciones
- Informe Caida LibreDocumento12 páginasInforme Caida LibreMiguelito SolerAún no hay calificaciones
- Trabajo mecánica clásica: concepto, cálculo y relación con energíaDocumento34 páginasTrabajo mecánica clásica: concepto, cálculo y relación con energíaJose Luis ValdiviezoAún no hay calificaciones
- Una Varilla Rígida de Longitud LDocumento8 páginasUna Varilla Rígida de Longitud LArielCarvajalAún no hay calificaciones
- Fuerzas ParalelasDocumento7 páginasFuerzas ParalelasNelson Andres PaezAún no hay calificaciones
- Momento de Inercia y CentriodesDocumento24 páginasMomento de Inercia y CentriodeskevinAún no hay calificaciones
- Leyes de Newton y principios de transmisibilidadDocumento4 páginasLeyes de Newton y principios de transmisibilidadsegundoelecAún no hay calificaciones
- Diagrama de Cuerpo LibreDocumento5 páginasDiagrama de Cuerpo LibreintiAún no hay calificaciones
- Coeficiente de FriccionDocumento7 páginasCoeficiente de FriccionArnoldLunaNAún no hay calificaciones
- Leyes de NewtonDocumento4 páginasLeyes de NewtonSherwinAún no hay calificaciones
- Teorema de Conservacion de Cantidad de MovimientoDocumento7 páginasTeorema de Conservacion de Cantidad de MovimientoLuis HernandezAún no hay calificaciones
- Vector Posicion Yv MC On FormulasDocumento47 páginasVector Posicion Yv MC On Formulastributo415Aún no hay calificaciones
- Principio de SuperposicionDocumento2 páginasPrincipio de SuperposicionMartin TaramonaAún no hay calificaciones
- Aplicacion de Las Leyes de NewtonDocumento4 páginasAplicacion de Las Leyes de NewtonConsuelo CoradoAún no hay calificaciones
- Análisis CríticoDocumento8 páginasAnálisis CríticoEliMagoAún no hay calificaciones
- Laboratorio Sistemas en EquilibrioDocumento22 páginasLaboratorio Sistemas en EquilibrioJuan Jose Cantillo TaveraAún no hay calificaciones
- Unidad 2Documento16 páginasUnidad 2Aldair MartínezAún no hay calificaciones
- Principio de SimultaneidadDocumento2 páginasPrincipio de SimultaneidadEduardo RaHe100% (1)
- Dinámica Del Punto MaterialDocumento4 páginasDinámica Del Punto MaterialBobAún no hay calificaciones
- Modelos Matemáticos y Solución de Problemas en IngenieríaDocumento12 páginasModelos Matemáticos y Solución de Problemas en Ingeniería'Andres TorregrosaAún no hay calificaciones
- Glosario de EstáticaDocumento2 páginasGlosario de EstáticaRodrigo Lorduy CalumeAún no hay calificaciones
- Definición de La Física y Su Clasificación.Documento1 páginaDefinición de La Física y Su Clasificación.Alondra Reyes MoralesAún no hay calificaciones
- Presentacion CINEMATICA - CINETICADocumento23 páginasPresentacion CINEMATICA - CINETICAAndrea BerrioAún no hay calificaciones
- Experimento de Michelson MorleyDocumento4 páginasExperimento de Michelson MorleyJavier MejiaAún no hay calificaciones
- Informe Segunda Ley de NewtonDocumento9 páginasInforme Segunda Ley de NewtonSantiago VidalAún no hay calificaciones
- Laboratorio 8Documento17 páginasLaboratorio 8Leonardo QuezadaAún no hay calificaciones
- Informe Fisica M.R.UDocumento4 páginasInforme Fisica M.R.UGERSSON RONALDO RUIZ ULLOAAún no hay calificaciones
- GUÍA Momento de Inercia Rotacional (Ecuaciones, Deducciones)Documento12 páginasGUÍA Momento de Inercia Rotacional (Ecuaciones, Deducciones)Emilio GarciaAún no hay calificaciones
- Estática Del Sólido RígidoDocumento5 páginasEstática Del Sólido RígidoTusa VaudesAún no hay calificaciones
- Momento de Una Fuerza Con Respecto A Un PuntoDocumento2 páginasMomento de Una Fuerza Con Respecto A Un PuntoManuel HernándezAún no hay calificaciones
- 03 - Dinamica de La Particula (Parte I)Documento36 páginas03 - Dinamica de La Particula (Parte I)braian pezetAún no hay calificaciones
- TEMA 4-FUERZAS-Momento de Una Fuerza - Parte2Documento6 páginasTEMA 4-FUERZAS-Momento de Una Fuerza - Parte2Patrux EnglishAún no hay calificaciones
- Teoría de la Relatividad de EinsteinDocumento5 páginasTeoría de la Relatividad de EinsteinaypateAún no hay calificaciones
- INFORME - DE - LABORATORIO - DE - FISICA - (2DO) ValeriaDocumento14 páginasINFORME - DE - LABORATORIO - DE - FISICA - (2DO) ValeriaHugo Gabriel Sánchez ToctoAún no hay calificaciones
- Proyecto de FisicaDocumento10 páginasProyecto de FisicaAXEL JHAIR FLORES DIAZAún no hay calificaciones
- Qumica 1Documento15 páginasQumica 1BRAYAN ARTEAGA PAZAún no hay calificaciones
- 13,14,15Documento5 páginas13,14,15BRAYAN ARTEAGA PAZAún no hay calificaciones
- Reseña Histórica de La EstadísticaDocumento2 páginasReseña Histórica de La EstadísticaBRAYAN ARTEAGA PAZAún no hay calificaciones
- Tarea Probalidades 34-44....Documento13 páginasTarea Probalidades 34-44....BRAYAN ARTEAGA PAZAún no hay calificaciones
- Tarea ProbalidadesDocumento12 páginasTarea ProbalidadesBRAYAN ARTEAGA PAZAún no hay calificaciones
- Diseño sistemas de saneamientoDocumento37 páginasDiseño sistemas de saneamientoJerson Vera ChAún no hay calificaciones
- AutoCAD CIVIL 3D NI Maquetacion de PlanosDocumento41 páginasAutoCAD CIVIL 3D NI Maquetacion de Planostoky-topo100% (3)
- Problemas Resueltos EstaticaDocumento41 páginasProblemas Resueltos EstaticaYaneth Patricia Ramirez71% (14)
- Geologia Aplicada A La Ingenieria Civil Juan Manuel Lopez Marinas PDFDocumento588 páginasGeologia Aplicada A La Ingenieria Civil Juan Manuel Lopez Marinas PDFDaisy GelvezAún no hay calificaciones
- Geologia Aplicada A La Ingenieria Civil Juan Manuel Lopez Marinas PDFDocumento588 páginasGeologia Aplicada A La Ingenieria Civil Juan Manuel Lopez Marinas PDFDaisy GelvezAún no hay calificaciones
- Hds-Jabón Neutro QNDocumento3 páginasHds-Jabón Neutro QNvikthorolivesAún no hay calificaciones
- Tarea N°1 A.C. IIDocumento3 páginasTarea N°1 A.C. IIAndres GomezAún no hay calificaciones
- Metrado Muro de ContencionDocumento9 páginasMetrado Muro de ContencionCarlos A. Martínez BenaventeAún no hay calificaciones
- Lineamientos TA1 Comportamiento Al Consumidor - 2021Documento7 páginasLineamientos TA1 Comportamiento Al Consumidor - 2021José GarcíaAún no hay calificaciones
- Introducción: Edessa Spp. EN EL CERRODocumento5 páginasIntroducción: Edessa Spp. EN EL CERROANGEL SHIDDARTHA GUZMAN MONTA�OAún no hay calificaciones
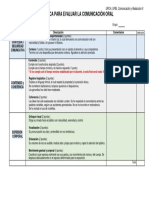
- Rubrica para Calificar La Comunicación OralDocumento1 páginaRubrica para Calificar La Comunicación OralLayda Chara RoblesAún no hay calificaciones
- Observación de células vegetales en catáfila de cebollaDocumento2 páginasObservación de células vegetales en catáfila de cebollaGerald ChalanAún no hay calificaciones
- Eìstemologia y Discurso Escolar CeciliaCrespoDocumento67 páginasEìstemologia y Discurso Escolar CeciliaCrespoBoletín Gabriela MistralAún no hay calificaciones
- Tipos de guerrasDocumento11 páginasTipos de guerrasProfra. Juanita MontemayorAún no hay calificaciones
- Guía Técnica Plan Prevencion, Preparacion y Respuesta Ante Emergencias Correcion ListaDocumento114 páginasGuía Técnica Plan Prevencion, Preparacion y Respuesta Ante Emergencias Correcion ListaYESICA GARCIAAún no hay calificaciones
- Plan de MATEMÁTICAS 9° 2021Documento8 páginasPlan de MATEMÁTICAS 9° 2021hubaplaAún no hay calificaciones
- PYTHON en Menos de Una Semana - Con Ejercicios de Práctica PDFDocumento53 páginasPYTHON en Menos de Una Semana - Con Ejercicios de Práctica PDFJosé L Colque100% (1)
- Lutereau, Luciano (2018) - Saber y Verdad en El Seminario 17 de Jacques LacanDocumento4 páginasLutereau, Luciano (2018) - Saber y Verdad en El Seminario 17 de Jacques LacanGavefenyxAún no hay calificaciones
- ToumaiDocumento2 páginasToumaiAlfaAún no hay calificaciones
- La Comunidad en La Tradición Sociológica ModernaDocumento25 páginasLa Comunidad en La Tradición Sociológica ModernaDaniel Eren RodriguezAún no hay calificaciones
- 05.02 Metodo Del Valor GanadoDocumento22 páginas05.02 Metodo Del Valor GanadoJorge CogleyAún no hay calificaciones
- Planeacion Aprendo A ReciclarDocumento3 páginasPlaneacion Aprendo A ReciclarOsman J Sandoval D100% (2)
- Matematicas 11º Gua 4 Segundo Periodo 2021 Funciones RealesDocumento9 páginasMatematicas 11º Gua 4 Segundo Periodo 2021 Funciones RealesÄňdřëš Fëĺípë Ťöüš BäĺšëïřöAún no hay calificaciones
- Hablemos de ViolenciaDocumento7 páginasHablemos de ViolenciaSara RojasAún no hay calificaciones
- Diseño de Canales: Hidráulica, Estructura y EstabilidadDocumento19 páginasDiseño de Canales: Hidráulica, Estructura y EstabilidadFrancisco Alban Benites0% (1)
- Presentación Curso Lubricacion IndustrialDocumento194 páginasPresentación Curso Lubricacion IndustrialStratowarion100% (1)
- Informe Psicopedagógico de Ingreso Catalina CuadraDocumento3 páginasInforme Psicopedagógico de Ingreso Catalina CuadraSeba LionAún no hay calificaciones
- ÉTICA Y FICCIÓN. La Inteligencia Narrativa. Cecilia Caputo y Vera WaksmanDocumento7 páginasÉTICA Y FICCIÓN. La Inteligencia Narrativa. Cecilia Caputo y Vera WaksmanIsabel Margarita Herrera AltamiranoAún no hay calificaciones
- Guion Del VideoDocumento4 páginasGuion Del Videoshinoboni100% (1)
- Títulos LgeepaDocumento9 páginasTítulos LgeepaLucía ContrerasAún no hay calificaciones
- Areas Verdes de La EscuelaDocumento32 páginasAreas Verdes de La EscuelaPatricia100% (1)
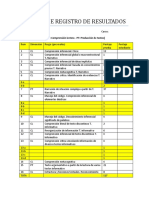
- Cuadro de Registro de Resultados 6to BásicoDocumento2 páginasCuadro de Registro de Resultados 6to BásicoMarii Contreras100% (1)
- Taller # 2 Grado 8Documento3 páginasTaller # 2 Grado 8LuisapaAún no hay calificaciones
- Te 1319Documento45 páginasTe 1319erlik aironAún no hay calificaciones
- Bacterias PatogenasDocumento34 páginasBacterias PatogenasDiegoAún no hay calificaciones