También podría gustarte
- Ejercicios EconometríaDocumento10 páginasEjercicios EconometríaAndrea Cano SánchezAún no hay calificaciones
- Estimación PuntualDocumento8 páginasEstimación PuntualTony Fernández ReyesAún no hay calificaciones
- Guia Matlab Lab N 3 MM-411 2016-1 PDFDocumento8 páginasGuia Matlab Lab N 3 MM-411 2016-1 PDFDaniel ArticaAún no hay calificaciones
- Simulación Partícula en ParábolaDocumento5 páginasSimulación Partícula en ParábolaLuis MiguelAún no hay calificaciones
- T3MNSMDocumento4 páginasT3MNSMCesar Vargas ArayaAún no hay calificaciones
- CMII 18 19 Solucion FebreroDocumento13 páginasCMII 18 19 Solucion FebreroEnergya CorporacionAún no hay calificaciones
- Modelo de RegresionDocumento8 páginasModelo de RegresionmanuelAún no hay calificaciones
- Resumen Eco I 2021Documento15 páginasResumen Eco I 2021Marilena Denisa MicuAún no hay calificaciones
- Pract1 PDFDocumento16 páginasPract1 PDFnicoAún no hay calificaciones
- Taller 2 - ÁlabesDocumento11 páginasTaller 2 - ÁlabesjoseAún no hay calificaciones
- Taller Ecuaciones de Calor y de OndaDocumento16 páginasTaller Ecuaciones de Calor y de Ondaemonsalve10Aún no hay calificaciones
- FFIII 21 22 Febrero2 v3 SOLUCIONESDocumento7 páginasFFIII 21 22 Febrero2 v3 SOLUCIONESAntoni Aspa BufíAún no hay calificaciones
- Milton Rojas - 203042A - 954Documento21 páginasMilton Rojas - 203042A - 954Milton RojasAún no hay calificaciones
- Clase 14Documento3 páginasClase 14Pao AdmAún no hay calificaciones
- MM 202 Tarea 2par 2per 2018Documento2 páginasMM 202 Tarea 2par 2per 2018DavidCpdAún no hay calificaciones
- Intervalos de Confianza 2018 - 2Documento27 páginasIntervalos de Confianza 2018 - 2Geraldine GarcíaAún no hay calificaciones
- CMII Febrero2015 16 SolucionDocumento11 páginasCMII Febrero2015 16 SolucionBeatriz AgraAún no hay calificaciones
- Tarea 4 Ecuaciones DiferencialesDocumento7 páginasTarea 4 Ecuaciones DiferencialesRoberto SierraAún no hay calificaciones
- Ejemlos de DistribucionDocumento10 páginasEjemlos de DistribucionEduardo Isai PMAún no hay calificaciones
- ArticuloDocumento3 páginasArticuloRENZO RANIEIRO CHUMPITASI SANTANAAún no hay calificaciones
- Tarea 4Documento9 páginasTarea 4Juan Manuel OrtizAún no hay calificaciones
- ECUACCIONESDocumento28 páginasECUACCIONESCesarAdolfoEstupiñanRojasAún no hay calificaciones
- Conceptos Básicos Cuántica PDFDocumento96 páginasConceptos Básicos Cuántica PDFjuan davidAún no hay calificaciones
- Variables Aleatorias NormalesDocumento4 páginasVariables Aleatorias NormalesByron Alexis PalazziAún no hay calificaciones
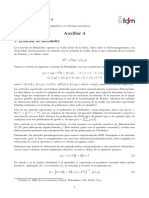
- Auxiliar 4Documento8 páginasAuxiliar 4Camilo Eduardo Avilés QuintanillaAún no hay calificaciones
- Oscilador Armónico CuánticoDocumento4 páginasOscilador Armónico CuánticoJean Carlos Jimenez HuillcaAún no hay calificaciones
- Calculo Multivariado - Tarea2Documento9 páginasCalculo Multivariado - Tarea2donnis perezAún no hay calificaciones
- Contenido Activador Unidad 3 EconometríaDocumento22 páginasContenido Activador Unidad 3 Econometríaalmendra4943Aún no hay calificaciones
- p4 Pendol Balistic 1Documento13 páginasp4 Pendol Balistic 1not DrunkerAún no hay calificaciones
- Tema 3 Ejemplo CompletoDocumento5 páginasTema 3 Ejemplo CompletoPAOLA RIVAS GARCIAAún no hay calificaciones
- Pozo y Onda ViajeraDocumento1 páginaPozo y Onda Viajerachuy morales oficialAún no hay calificaciones
- Ecuación de SchrodingerDocumento21 páginasEcuación de SchrodingerFranco CentAún no hay calificaciones
- Tarea4 Wendy Johanna Moreno Diaz - Grupo - 126Documento14 páginasTarea4 Wendy Johanna Moreno Diaz - Grupo - 126wendy jhoanna moreno diazAún no hay calificaciones
- Tarea2 PDFDocumento20 páginasTarea2 PDFSergio Andrés Díaz VeraAún no hay calificaciones
- Clase 13 2021-1 Fisica ModernaDocumento7 páginasClase 13 2021-1 Fisica ModernanoelAún no hay calificaciones
- P3mcei 2020 2Documento3 páginasP3mcei 2020 2David Camilo Piedras RuizAún no hay calificaciones
- Relacion 7Documento3 páginasRelacion 7David TapiaAún no hay calificaciones
- TAREA 1 Calculo Ejercicios BDocumento9 páginasTAREA 1 Calculo Ejercicios BfreddyAún no hay calificaciones
- Tema2 - Modelo HeterocedasticoDocumento18 páginasTema2 - Modelo Heterocedasticojhon gliddenAún no hay calificaciones
- Ejercicio 1 WENDY JOHANNA MORNEO DIAZDocumento3 páginasEjercicio 1 WENDY JOHANNA MORNEO DIAZwendy jhoanna moreno diazAún no hay calificaciones
- Propiedades de Los EstimadoresDocumento20 páginasPropiedades de Los EstimadoresGUERRERO ROMERO MANUEL ISMAELAún no hay calificaciones
- PC3 2021.2 SolDocumento10 páginasPC3 2021.2 SolEros Alvin Airthon Damas QuispeAún no hay calificaciones
- Est - Aplic II - Análisis de Regresion Múltiple Lineal 2022VFDocumento16 páginasEst - Aplic II - Análisis de Regresion Múltiple Lineal 2022VFGianmarco Romero TorresAún no hay calificaciones
- ECUACIONESDocumento19 páginasECUACIONESRuben David González PerezAún no hay calificaciones
- Tema 3 PDFDocumento163 páginasTema 3 PDFAnnyFernandaSanchezTiqueAún no hay calificaciones
- Lab3 - MODELO MATEMÁTICO DE UN SISTEMA MASA RESORTE, ADECUADO 8 MAYO 2020Documento6 páginasLab3 - MODELO MATEMÁTICO DE UN SISTEMA MASA RESORTE, ADECUADO 8 MAYO 2020Bratt ArangoAún no hay calificaciones
- 62022Documento155 páginas62022Youssra BenacherAún no hay calificaciones
- Intervalos de Confianza-1Documento11 páginasIntervalos de Confianza-1Kaai CabreraAún no hay calificaciones
- Tarea 3 Cálculo IntegralDocumento6 páginasTarea 3 Cálculo IntegralelmoralessAún no hay calificaciones
- Modos Normales en Una Membrana (Sistema Clasico)Documento9 páginasModos Normales en Una Membrana (Sistema Clasico)Manuel Daniel Olmedo HernandezAún no hay calificaciones
- Clase 24 Edp Parab ExplDocumento14 páginasClase 24 Edp Parab ExplCristian NarváezAún no hay calificaciones
- MONOGRAFÍA DE ECUACIONES DIFERENCIALES FERNANDEZ (Autoguardado)Documento237 páginasMONOGRAFÍA DE ECUACIONES DIFERENCIALES FERNANDEZ (Autoguardado)Edu Jhordan Maldonado GarciaAún no hay calificaciones
- ENSAYODocumento5 páginasENSAYOChinchunsanAún no hay calificaciones
- Ecuaciones LaplaceDocumento11 páginasEcuaciones LaplaceLisbeth Reyes PáezAún no hay calificaciones
- Trabajo Final Metodos NumericosDocumento51 páginasTrabajo Final Metodos NumericosJuliette Gaviria NavarroAún no hay calificaciones
- Ecuación de Onda LinealDocumento5 páginasEcuación de Onda Linealfernando benottiAún no hay calificaciones
- Potencial Escalón 2Documento6 páginasPotencial Escalón 2Adolfo Ramírez SánchezAún no hay calificaciones
- Pauta Tarea 2 EDO 2022-2Documento7 páginasPauta Tarea 2 EDO 2022-2Camilo SebastianAún no hay calificaciones
- Seminario SAB Volcan - 3T22Documento1 páginaSeminario SAB Volcan - 3T22rematoAún no hay calificaciones
- Manual Portal IncorporacionesDocumento18 páginasManual Portal IncorporacionesrematoAún no hay calificaciones
- Tarea 1 - Introducción A Las FinanzasDocumento4 páginasTarea 1 - Introducción A Las FinanzasrematoAún no hay calificaciones
- Construccion de Flujos de CajaDocumento32 páginasConstruccion de Flujos de CajarematoAún no hay calificaciones
- Economatica PresentacionDocumento19 páginasEconomatica PresentacionrematoAún no hay calificaciones
- Sesión 5 - La Previsión de Los Cash-Flows de Un Proyecto de Inversión Empresarial I (Con Marca de Agua)Documento83 páginasSesión 5 - La Previsión de Los Cash-Flows de Un Proyecto de Inversión Empresarial I (Con Marca de Agua)rematoAún no hay calificaciones
- Reglamento VII Juego de BolsaDocumento6 páginasReglamento VII Juego de BolsarematoAún no hay calificaciones
- F01 (It Ogeper Minedu 01)Documento8 páginasF01 (It Ogeper Minedu 01)rematoAún no hay calificaciones
- 2021-02-04 Traduccion Capitalismo StakeholdersDocumento4 páginas2021-02-04 Traduccion Capitalismo StakeholdersrematoAún no hay calificaciones
- Trabajo Final - PortDocumento5 páginasTrabajo Final - PortrematoAún no hay calificaciones
- Sesión 1 - Introducción A Las Finanzas Corporativas (Con Marca de Agua)Documento32 páginasSesión 1 - Introducción A Las Finanzas Corporativas (Con Marca de Agua)rematoAún no hay calificaciones
- Brochure S4S InvestmentsDocumento7 páginasBrochure S4S InvestmentsrematoAún no hay calificaciones
- Clase Semana 1 Log. IntlDocumento26 páginasClase Semana 1 Log. IntlrematoAún no hay calificaciones
- FORO 1 - Solo El 5% de Las Empresas Peruanas Aplican Gestiones de Responsabilidad SocialDocumento1 páginaFORO 1 - Solo El 5% de Las Empresas Peruanas Aplican Gestiones de Responsabilidad SocialrematoAún no hay calificaciones
- El Estimador de Mínimos Cuadrados Ordinarios (Mco)Documento20 páginasEl Estimador de Mínimos Cuadrados Ordinarios (Mco)rematoAún no hay calificaciones
- Semana 1 - Historia de La HoteleríaDocumento27 páginasSemana 1 - Historia de La HoteleríarematoAún no hay calificaciones
- Guion El Hotel LibertadorDocumento2 páginasGuion El Hotel LibertadorrematoAún no hay calificaciones
- La Inteligencia EmocionalDocumento27 páginasLa Inteligencia EmocionalrematoAún no hay calificaciones
- MOOC Modulo 3 Formulación de Proyecto.Documento16 páginasMOOC Modulo 3 Formulación de Proyecto.rematoAún no hay calificaciones
- Guía de Trabajo Aplicativo Logis Intl Ciclo 2020 2Documento2 páginasGuía de Trabajo Aplicativo Logis Intl Ciclo 2020 2rematoAún no hay calificaciones
- Sílabo - Fundamentos de EconometríaDocumento5 páginasSílabo - Fundamentos de EconometríarematoAún no hay calificaciones
- ACELERACIONDocumento6 páginasACELERACIONDaniel PacabAún no hay calificaciones
- ArquetiposDocumento6 páginasArquetiposMarga VeronAún no hay calificaciones
- Nieto Cardoso, Ezequiel - Psicoterapia, Principios y Técnicas - 1Documento27 páginasNieto Cardoso, Ezequiel - Psicoterapia, Principios y Técnicas - 1Haydee Martínez Yupit100% (1)
- SEO en Los ContenidosDocumento13 páginasSEO en Los Contenidosyanina6Aún no hay calificaciones
- La Luz y El ColorDocumento42 páginasLa Luz y El ColorAnonymous sbrU1XU86UAún no hay calificaciones
- Linea de Tiempo Corriente PreclásicaDocumento1 páginaLinea de Tiempo Corriente PreclásicaRosa EstradaAún no hay calificaciones
- ManualparalaFormaciondeFacilitadoresenlaPruebadeDesarrollloInfantil EDI PDFDocumento138 páginasManualparalaFormaciondeFacilitadoresenlaPruebadeDesarrollloInfantil EDI PDFjhoracios836318100% (1)
- Cotizacion PRIMERO NIVEL ILUMINACIONDocumento2 páginasCotizacion PRIMERO NIVEL ILUMINACIONVictor eduardo Vargas guevaraAún no hay calificaciones
- Digitalizacion Esp Area II Unam 14 de MayoDocumento5 páginasDigitalizacion Esp Area II Unam 14 de MayoVelázquez Martínez Jonathan HazielAún no hay calificaciones
- Plan Decimo ArtesDocumento16 páginasPlan Decimo ArtesJohana Vargas SáenzAún no hay calificaciones
- SFR-MN-02 Manual Manejo Gases MedicinalesDocumento13 páginasSFR-MN-02 Manual Manejo Gases MedicinalesPEDRO GRANADOSAún no hay calificaciones
- Gomez, Francesc - El Pequeño Libro de Las Redes SocialesDocumento161 páginasGomez, Francesc - El Pequeño Libro de Las Redes SocialesLeidy YF100% (1)
- Investigación Sobre Administración de ProyectosDocumento8 páginasInvestigación Sobre Administración de ProyectosAldair Cruz BautistaAún no hay calificaciones
- 15-Salud-Preescolar-Padres de FamiliaDocumento5 páginas15-Salud-Preescolar-Padres de FamiliaJany ArteagaAún no hay calificaciones
- Balanza Comercial Perú. CABRERADocumento6 páginasBalanza Comercial Perú. CABRERAAntonio UpcAún no hay calificaciones
- 2220 26603565 20200211180751Documento1 página2220 26603565 20200211180751RennyAún no hay calificaciones
- Pliego de Condiciones Definitivo #LP-004-2023Documento67 páginasPliego de Condiciones Definitivo #LP-004-2023MAQUINAS OBRAS Y PROYECTOS S.A.S. ZOMACAún no hay calificaciones
- Losa EFCODocumento165 páginasLosa EFCOPablo CoromadoAún no hay calificaciones
- Instalaciones ElectricasDocumento3 páginasInstalaciones ElectricasEstrella RicardoAún no hay calificaciones
- Fase 5 Informe Final WFDBDocumento9 páginasFase 5 Informe Final WFDBwilman fernando daza belloAún no hay calificaciones
- Monografia SociolllDocumento19 páginasMonografia SociolllMarko CCAún no hay calificaciones
- Diagrama - Procedimiento Adquisición y Bajas de ActivosDocumento3 páginasDiagrama - Procedimiento Adquisición y Bajas de ActivosLuis ChuchónAún no hay calificaciones
- Nahuas TexcocoDocumento58 páginasNahuas TexcocoBeto EscalanteAún no hay calificaciones
- La Dieta de La Sopa Quema GrasaDocumento11 páginasLa Dieta de La Sopa Quema GrasaSusapinAún no hay calificaciones
- 2.1 EnsayoDocumento3 páginas2.1 EnsayoFabian SanchezAún no hay calificaciones
- Cap 10 Control de Movimiento Usando Motores de PasoDocumento3 páginasCap 10 Control de Movimiento Usando Motores de Pasosamuel uribeAún no hay calificaciones
- Receta MédicaDocumento15 páginasReceta MédicaANDDONI ALEXANDER CAPCHA MUÑOZAún no hay calificaciones
- El Espíritu de La Liturgia, Cap. 3Documento4 páginasEl Espíritu de La Liturgia, Cap. 3isaiasAún no hay calificaciones
- Plc1-Sesion1Documento21 páginasPlc1-Sesion1Helen Cárdenas Honores100% (1)
- Ejercicios Regresión Lineal-1Documento4 páginasEjercicios Regresión Lineal-1Vegueta GuapoAún no hay calificaciones