También podría gustarte
- Estaño y Sus AleacionesDocumento4 páginasEstaño y Sus AleacionesJeyson IsraelAún no hay calificaciones
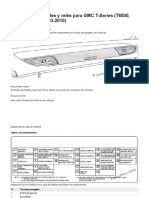
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones
- Desbalanceo Estatico y Dinamico, Una Breve ExplicacionDocumento2 páginasDesbalanceo Estatico y Dinamico, Una Breve ExplicacionMiguel Sanchez MartinezAún no hay calificaciones
- Apuntes 08 - Blanceo DinamicoDocumento5 páginasApuntes 08 - Blanceo DinamicoAngelo Reyes G.Aún no hay calificaciones
- Tipos y combinaciones de desbalanceo en rotoresDocumento10 páginasTipos y combinaciones de desbalanceo en rotoresmartinoly789Aún no hay calificaciones
- DESBALANCEODocumento5 páginasDESBALANCEOJorge Ruben Lara GonzalezAún no hay calificaciones
- Equilibrado de máquinas rotativasDocumento4 páginasEquilibrado de máquinas rotativasPablo Andrés100% (2)
- Desequilibrio EstáticoDocumento1 páginaDesequilibrio EstáticoCarlos AguilarAún no hay calificaciones
- Exposicion Tipos de Desbalanceo. Pedro Mendoza LopezDocumento8 páginasExposicion Tipos de Desbalanceo. Pedro Mendoza LopezLino AlorAún no hay calificaciones
- DESBALANCEODocumento7 páginasDESBALANCEOJeyson IsraelAún no hay calificaciones
- Balance Dinamico y EstaticoDocumento22 páginasBalance Dinamico y EstaticoAnarelyAún no hay calificaciones
- Balance Estatico y DinamicoDocumento6 páginasBalance Estatico y DinamicoRamses A. TorresAún no hay calificaciones
- Balanceo de rotores: desbalance estático y dinámicoDocumento8 páginasBalanceo de rotores: desbalance estático y dinámicojuanAún no hay calificaciones
- Desbalance de maquinaria: tipos y balanceo dinámicoDocumento11 páginasDesbalance de maquinaria: tipos y balanceo dinámicoDaniel CabreraAún no hay calificaciones
- El DesbalanceDocumento6 páginasEl DesbalanceLorena CermeñoAún no hay calificaciones
- Balanceo de rotores: conceptos, estático, dinámico y corrección en 1-2 planosDocumento18 páginasBalanceo de rotores: conceptos, estático, dinámico y corrección en 1-2 planosDaniel González OrtegaAún no hay calificaciones
- Balanceo de Mecanismos Y MáquinasDocumento7 páginasBalanceo de Mecanismos Y MáquinasLeonor LucenaAún no hay calificaciones
- BalanceoDocumento11 páginasBalanceokingsevenAún no hay calificaciones
- 180B0699 Cristian Lagunes T1U3Documento2 páginas180B0699 Cristian Lagunes T1U3cristian lagunesAún no hay calificaciones
- Balanceo de Motores Estático y DinámicoDocumento8 páginasBalanceo de Motores Estático y DinámicoGabriel Aguilar PerezAún no hay calificaciones
- Balanceo de RotoresDocumento6 páginasBalanceo de RotoresChuy HernandezAún no hay calificaciones
- Unidad IV Balanceo de Rotores yDocumento21 páginasUnidad IV Balanceo de Rotores yalanbf3100% (1)
- Alineación y BalanceoDocumento10 páginasAlineación y BalanceoJuan ManuelAún no hay calificaciones
- Balanceo de rotores: tipos de desbalance y métodos de correcciónDocumento19 páginasBalanceo de rotores: tipos de desbalance y métodos de correcciónKaki Lucho LópezAún no hay calificaciones
- Balanceo de RotoresDocumento7 páginasBalanceo de RotoresJunior Ademir Flores VargasAún no hay calificaciones
- Las Vibraciones en Las Turbinas A VaporDocumento4 páginasLas Vibraciones en Las Turbinas A VaporG-sus Albert Julca UlloaAún no hay calificaciones
- Unidad IV Balanceo de RotoresDocumento19 páginasUnidad IV Balanceo de RotoresJ Rodrigo Castro HAún no hay calificaciones
- Unidad 4-Balanceo de RotoresDocumento6 páginasUnidad 4-Balanceo de Rotorescabobunbury10Aún no hay calificaciones
- Balanceo de EjesDocumento9 páginasBalanceo de EjesvoaxakuxAún no hay calificaciones
- 10 Vibración en RotoresDocumento41 páginas10 Vibración en RotoresDariel GomezAún no hay calificaciones
- Balanceo DinamicoDocumento15 páginasBalanceo DinamicoEber Sánchez Tadeo100% (2)
- CharlotteDocumento14 páginasCharlottePablo ScottAún no hay calificaciones
- Tablas de Charlotte DDocumento6 páginasTablas de Charlotte Dmaria alejandraAún no hay calificaciones
- Alineacion y BalanceoDocumento10 páginasAlineacion y BalanceoSaid Diaz MirandaAún no hay calificaciones
- Páginas Desdevdocuments - MX - Tablas-De-Charlotte-5584642e71ef9 1Documento1 páginaPáginas Desdevdocuments - MX - Tablas-De-Charlotte-5584642e71ef9 1panalcaAún no hay calificaciones
- TABLAS DE CHARLOTTE DDocumento6 páginasTABLAS DE CHARLOTTE DDavid Ricardo Santos Canqui100% (12)
- Ensayo Unidad 4 Balanceo de RotoresDocumento17 páginasEnsayo Unidad 4 Balanceo de RotoresEmmanuel TBAún no hay calificaciones
- Tablas CharlotteDocumento11 páginasTablas CharlotteChristian Bayas Guevara100% (1)
- Desbalanceo de RotoresDocumento15 páginasDesbalanceo de RotoresEder Solis0% (1)
- Trabajo Práctico Equilibrio de RotoresDocumento6 páginasTrabajo Práctico Equilibrio de RotoresMarcos RodrigoAún no hay calificaciones
- Singtomas de VibDocumento53 páginasSingtomas de Vibatorrez77Aún no hay calificaciones
- Carta de Diagnostico de VibracionesDocumento5 páginasCarta de Diagnostico de VibracionesJohn ZapataAún no hay calificaciones
- Tablas de Charlotte EspañolDocumento6 páginasTablas de Charlotte EspañolIván CentenoAún no hay calificaciones
- TEC-Balanceo estático y dinámico de motoresDocumento15 páginasTEC-Balanceo estático y dinámico de motoresgabriel Aguilar PerezAún no hay calificaciones
- Balanceo de RotoresDocumento14 páginasBalanceo de RotoresDiego FloresAún no hay calificaciones
- Carta de diagnóstico de vibraciónDocumento6 páginasCarta de diagnóstico de vibraciónMiguel CorderaAún no hay calificaciones
- Desbalanceo de Rotores1Documento40 páginasDesbalanceo de Rotores1George ZegarraAún no hay calificaciones
- Balanceo estático: centro de masa y eje de rotaciónDocumento6 páginasBalanceo estático: centro de masa y eje de rotaciónEric JassoAún no hay calificaciones
- Balanceo EstáticoDocumento6 páginasBalanceo EstáticoMoises Delgado RupayAún no hay calificaciones
- Trabajo Práctico Equilibrio de RotoresDocumento6 páginasTrabajo Práctico Equilibrio de RotoresMarcos RodrigoAún no hay calificaciones
- ANEXO II TABLA Diagnóstico de VibracionesDocumento9 páginasANEXO II TABLA Diagnóstico de VibracionesNilton Ernesto Saldarriaga IbarraAún no hay calificaciones
- Balanceo EstaticoDocumento6 páginasBalanceo EstaticoNerio Elguera Medina0% (1)
- Guía de Ensayo de CompresiónDocumento8 páginasGuía de Ensayo de CompresiónMarcelo Veloz LopezAún no hay calificaciones
- Polímeros Enero 2019 PDFDocumento79 páginasPolímeros Enero 2019 PDFElvis Adrian GusquiAún no hay calificaciones
- Magnesio PDFDocumento9 páginasMagnesio PDFJhoel DH VillacresAún no hay calificaciones
- Aleaciones CobreDocumento28 páginasAleaciones CobreJeyson IsraelAún no hay calificaciones
- Características y aplicaciones de las aleaciones de níquelDocumento22 páginasCaracterísticas y aplicaciones de las aleaciones de níquelFre Fer HolyAún no hay calificaciones
- Deber TorsionDocumento3 páginasDeber TorsionJeyson IsraelAún no hay calificaciones
- Columnas Con Cargas ExcéntricasDocumento10 páginasColumnas Con Cargas Excéntricasalu0100815382100% (1)
- Curva Esfuerzo Vs DeformaciónDocumento3 páginasCurva Esfuerzo Vs DeformaciónJeyson IsraelAún no hay calificaciones
- .archivetempTRATAMIENTOS TERMICOS CLASE 1 PDFDocumento122 páginas.archivetempTRATAMIENTOS TERMICOS CLASE 1 PDFwilson CAún no hay calificaciones
- Presentacion Selecc MatDocumento10 páginasPresentacion Selecc MatJeyson IsraelAún no hay calificaciones
- Endurecimiento por precipitación en aleaciones no ferrosasDocumento28 páginasEndurecimiento por precipitación en aleaciones no ferrosasJeyson IsraelAún no hay calificaciones
- DESBALANCEODocumento7 páginasDESBALANCEOJeyson IsraelAún no hay calificaciones
- Seleccion de MaterialesDocumento51 páginasSeleccion de MaterialesJeyson IsraelAún no hay calificaciones
- Aleaciones PaperDocumento16 páginasAleaciones PaperJeyson IsraelAún no hay calificaciones
- Materiales - EjerciciosDocumento10 páginasMateriales - EjerciciosVladimir PaucarAún no hay calificaciones
- 1423 3628 2 PB PDFDocumento9 páginas1423 3628 2 PB PDFFernandoAún no hay calificaciones
- Semajanzas y Diferencias Entre Un Sistema FMS y CimDocumento1 páginaSemajanzas y Diferencias Entre Un Sistema FMS y CimJeyson Israel0% (1)
- Auto. IndustrialDocumento3 páginasAuto. Industrialmamd1993Aún no hay calificaciones
- Estaño y AleacionesDocumento6 páginasEstaño y AleacionesJeyson IsraelAún no hay calificaciones
- Metodo Compro Inv Grupo 2Documento9 páginasMetodo Compro Inv Grupo 2Jeyson IsraelAún no hay calificaciones
- ESPECTROSDocumento8 páginasESPECTROSJeyson IsraelAún no hay calificaciones
- Aplicacion de Carga DinamicaDocumento42 páginasAplicacion de Carga DinamicaJeyson IsraelAún no hay calificaciones
- Ejercicios Repaso EstáticaDocumento28 páginasEjercicios Repaso EstáticaJeyson IsraelAún no hay calificaciones
- Hojas Guias Lectura PulsadorDocumento3 páginasHojas Guias Lectura PulsadorJeyson IsraelAún no hay calificaciones
- Hojas Guias PotenciometroDocumento2 páginasHojas Guias PotenciometroJeyson IsraelAún no hay calificaciones
- Aleaciones Estaño-Grupo 2Documento22 páginasAleaciones Estaño-Grupo 2Jeyson IsraelAún no hay calificaciones
- DescargaDocumento18 páginasDescargaJeyson IsraelAún no hay calificaciones
- Hojas Guias Motor CDDocumento3 páginasHojas Guias Motor CDJeyson IsraelAún no hay calificaciones
- Informe de Sustentabilidad Grupo Elektra 2017 - ES PDFDocumento132 páginasInforme de Sustentabilidad Grupo Elektra 2017 - ES PDFLuisEnriquePimentelVillaAún no hay calificaciones
- Identificacion Visual A3Documento6 páginasIdentificacion Visual A3Ignacio vergaraAún no hay calificaciones
- Caso NanosoftDocumento4 páginasCaso NanosoftMauricio BeltránAún no hay calificaciones
- Formulario SolicitudDocumento1 páginaFormulario SolicitudEli de ValienteAún no hay calificaciones
- Requisitos CODIADocumento2 páginasRequisitos CODIAJonh TejadaAún no hay calificaciones
- Compendio INEI ArequipaDocumento482 páginasCompendio INEI ArequipaAguilar JoséAún no hay calificaciones
- Manual de Auditoria Interna Del Ministerio de Agricultura y Ganaderia 2017 PDFDocumento128 páginasManual de Auditoria Interna Del Ministerio de Agricultura y Ganaderia 2017 PDFmercedesAún no hay calificaciones
- Brunello Cucinelli (Empresa) - WikipediaDocumento14 páginasBrunello Cucinelli (Empresa) - WikipediaMatty A.Aún no hay calificaciones
- Fichas TextualesDocumento4 páginasFichas TextualesLuis Lopez0% (1)
- 1 PDFDocumento10 páginas1 PDFhgcuAún no hay calificaciones
- Actividad 2. - Actividad ExperimentalDocumento8 páginasActividad 2. - Actividad ExperimentalMontserrat HerreraAún no hay calificaciones
- Estiba y Trincaje de Mercancias en Contenedor 2edDocumento325 páginasEstiba y Trincaje de Mercancias en Contenedor 2edAlex SantillonAún no hay calificaciones
- Clasificacion Del Derecho Publico y PrivadoDocumento2 páginasClasificacion Del Derecho Publico y PrivadoFelipe ChávezAún no hay calificaciones
- Cómo Aliñar AceitunasDocumento6 páginasCómo Aliñar AceitunasAlejandropradosAún no hay calificaciones
- Hegemonía HolandesaDocumento3 páginasHegemonía HolandesaMauricio MaldadAún no hay calificaciones
- Ficha Sistema Hidraulico SKDocumento3 páginasFicha Sistema Hidraulico SKAlejandro GomezAún no hay calificaciones
- 1-Taller Higiene y Contaminación CruzadaDocumento3 páginas1-Taller Higiene y Contaminación CruzadaMonserrath BombonAún no hay calificaciones
- Educación ambiental hidroponíaDocumento12 páginasEducación ambiental hidroponíaFiorella FernandezAún no hay calificaciones
- Pag 122 125Documento3 páginasPag 122 125Richard IbarraAún no hay calificaciones
- Simulación fundición gravedad pieza aluminioDocumento47 páginasSimulación fundición gravedad pieza aluminioHarry Eduardo CuartasAún no hay calificaciones
- EF-RAIL (ECO FRIENDLY RAILWAY) Diego García ALTRANDocumento21 páginasEF-RAIL (ECO FRIENDLY RAILWAY) Diego García ALTRANsergioAún no hay calificaciones
- VHDL para La Simulacion de Circuitos SecuencialesDocumento2 páginasVHDL para La Simulacion de Circuitos SecuencialesfrandyAún no hay calificaciones
- Piedrabuena - Tomo 1Documento60 páginasPiedrabuena - Tomo 1melitallaAún no hay calificaciones
- Gradientes geométricos y exponenciales: ejercicios de financiamientoDocumento2 páginasGradientes geométricos y exponenciales: ejercicios de financiamientoViviana LopezAún no hay calificaciones
- 6 Presunciones de Compras y Ventas Base PresuntaDocumento64 páginas6 Presunciones de Compras y Ventas Base PresuntaEduardo García CanalesAún no hay calificaciones
- Tráfico Fluvial en EuropaDocumento24 páginasTráfico Fluvial en Europakiluha89Aún no hay calificaciones
- Codigo Tributario de NicaraguaDocumento87 páginasCodigo Tributario de NicaraguaOscar TellezAún no hay calificaciones
- Guía Recuperación Principios TermodinámicosDocumento4 páginasGuía Recuperación Principios TermodinámicosWilliam CoyAún no hay calificaciones
- COOTRANAR Es Una COOPETRATIVA de TRANSPORTADORES de ARAUQUITA Ubicada en El Municipio de Arauquita Departamento de AraucaDocumento2 páginasCOOTRANAR Es Una COOPETRATIVA de TRANSPORTADORES de ARAUQUITA Ubicada en El Municipio de Arauquita Departamento de AraucaDEISSYAún no hay calificaciones