También podría gustarte
- 05 Evaluación de La Condición de La MáquinaDocumento9 páginas05 Evaluación de La Condición de La Máquinamatrix1xAún no hay calificaciones
- 2014 Control Activo de Vibraciones en Un Rotor Tipo Jeffcott Con Velocidad Variable Usando Una Suspensión Electromecánica - ReadDocumento9 páginas2014 Control Activo de Vibraciones en Un Rotor Tipo Jeffcott Con Velocidad Variable Usando Una Suspensión Electromecánica - ReadAgustín Erasmo Juárez MartínezAún no hay calificaciones
- Curso Basic Balan PDFDocumento39 páginasCurso Basic Balan PDFALIX DAGHER100% (1)
- 8 - Balanceo - Corregido 2020Documento12 páginas8 - Balanceo - Corregido 2020Pedro MartinAún no hay calificaciones
- Unidad 2 Tema 4Documento14 páginasUnidad 2 Tema 4Kyred PlayerAún no hay calificaciones
- Balanceo de rotores: conceptos claveDocumento18 páginasBalanceo de rotores: conceptos claveRoberto AnimasAún no hay calificaciones
- Práctica 4 Univ. Lima Perez Jonatan Angel Carrera: Ing. Mecatrónica RU. 1760203 CI. 6153294Documento3 páginasPráctica 4 Univ. Lima Perez Jonatan Angel Carrera: Ing. Mecatrónica RU. 1760203 CI. 6153294Jonatan LimaAún no hay calificaciones
- Metodologia de BalanceoDocumento18 páginasMetodologia de BalanceoDOUGLAS CARRASCOAún no hay calificaciones
- Tipos de Desbalanceo - Docx Tarea AnayaDocumento13 páginasTipos de Desbalanceo - Docx Tarea Anayarogelio120387Aún no hay calificaciones
- Balanceo PDFDocumento31 páginasBalanceo PDFRonaldo Alcantara Castro100% (1)
- Velocidades Críticas-2Documento13 páginasVelocidades Críticas-2Bianca MedinaAún no hay calificaciones
- Análisis de Vibración y Efecto de La Variación de LosDocumento13 páginasAnálisis de Vibración y Efecto de La Variación de LosFederico BabichAún no hay calificaciones
- Balanceo CargasDocumento6 páginasBalanceo CargasMoises Tacuri MataqqueAún no hay calificaciones
- Laboratorio DesbalanceoDocumento14 páginasLaboratorio DesbalanceoRamon Cruz MamaniAún no hay calificaciones
- Instrumentación para AlineaciónDocumento5 páginasInstrumentación para AlineaciónCarlos Cristancho ClavijoAún no hay calificaciones
- 5 - Evaluacion - Condicion - Corregido 2020Documento9 páginas5 - Evaluacion - Condicion - Corregido 2020Pedro MartinAún no hay calificaciones
- IEEEDocumento3 páginasIEEEalexis javier vera soledispa VRAún no hay calificaciones
- Articulo Control en Modo DeslizanteDocumento9 páginasArticulo Control en Modo DeslizanteLuis Edo Garcia JaimesAún no hay calificaciones
- Métodos de BalanceoDocumento8 páginasMétodos de BalanceoCarlomagnoBautistoOrtizAún no hay calificaciones
- Practica Vibraciones No. 1Documento8 páginasPractica Vibraciones No. 1Alexis RomeroAún no hay calificaciones
- Balanceo DinamicoDocumento17 páginasBalanceo DinamicoJacob SánchezAún no hay calificaciones
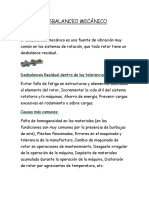
- Balanceo MecanicoDocumento8 páginasBalanceo MecanicoMateo MeierAún no hay calificaciones
- Balanceo de Rotores ExposicionDocumento5 páginasBalanceo de Rotores ExposicionChristian Javier Maldonado HernandezAún no hay calificaciones
- Dimensionamiento de Servomotoreselectri PDFDocumento10 páginasDimensionamiento de Servomotoreselectri PDFMIGUEL CASTAÑEDA CHINCHAYHUARAAún no hay calificaciones
- Segundo Informe de Laboratorio - Física III 1Documento6 páginasSegundo Informe de Laboratorio - Física III 1YilmarAún no hay calificaciones
- Parámetros de Una Máquina Sincrónica. Ensayos de Cortocircuito Súbito y Restablecimiento de Voltaje: Método de Los Elementos FinitosDocumento7 páginasParámetros de Una Máquina Sincrónica. Ensayos de Cortocircuito Súbito y Restablecimiento de Voltaje: Método de Los Elementos FinitosWalmy FernandezAún no hay calificaciones
- Balance de Rotores RígidosDocumento10 páginasBalance de Rotores RígidoscarlosAún no hay calificaciones
- Capitulo 4 Normas de Severidad de Vibraciones MecanicasDocumento14 páginasCapitulo 4 Normas de Severidad de Vibraciones Mecanicasnestor gpeAún no hay calificaciones
- Analisis de Vibraciones MecánicasDocumento10 páginasAnalisis de Vibraciones MecánicasJesús DavidAún no hay calificaciones
- Estimacion de Coeficientes Dinamicos enDocumento10 páginasEstimacion de Coeficientes Dinamicos enventasAún no hay calificaciones
- NeumaticaDocumento9 páginasNeumaticaJohanna PerezAún no hay calificaciones
- CMCDocumento16 páginasCMCPalomino AstridAún no hay calificaciones
- ASTM D4648-D4648M - 13, Veleta MiniaturaDocumento7 páginasASTM D4648-D4648M - 13, Veleta MiniaturaZoraida GuarnerosAún no hay calificaciones
- Análisis Espectral de Las Corrientes Del Estator (MCSA)Documento7 páginasAnálisis Espectral de Las Corrientes Del Estator (MCSA)David ClavonAún no hay calificaciones
- Balanceo de Rotores y Elementos Rotativos-1Documento12 páginasBalanceo de Rotores y Elementos Rotativos-1Ivan Noe Martinez ArellanoAún no hay calificaciones
- Folleto Normas SeveridadDocumento4 páginasFolleto Normas SeveridadMario Antonio Sanchez MoralesAún no hay calificaciones
- Evaluación de Estabilidad Transitoria de Sistemas de Potencia Utilizando El Concepto de Centro de InerciaDocumento9 páginasEvaluación de Estabilidad Transitoria de Sistemas de Potencia Utilizando El Concepto de Centro de InerciaCriss AlejjandraAún no hay calificaciones
- Articulo Ecuación de OscilaciónDocumento6 páginasArticulo Ecuación de OscilaciónJavier CastroAún no hay calificaciones
- Equilibrio de Rotores en Mtto PDFDocumento8 páginasEquilibrio de Rotores en Mtto PDFZsarahyi HernandezAún no hay calificaciones
- Maquinas balanceadoras dinámicasDocumento13 páginasMaquinas balanceadoras dinámicasEddy Quispe GaglayAún no hay calificaciones
- Informe Estator RotorDocumento8 páginasInforme Estator RotorFer AceAún no hay calificaciones
- Turbina Rushton Fluido No NewtonianoDocumento5 páginasTurbina Rushton Fluido No NewtonianoRomán GuadarramaAún no hay calificaciones
- Modelación EQPDocumento19 páginasModelación EQPEddyAún no hay calificaciones
- EXAMEN PRIMER PARCIAL ROBÓTICADocumento2 páginasEXAMEN PRIMER PARCIAL ROBÓTICAALFREDO ARAUCO GOYTIAAún no hay calificaciones
- Tra Aut 1 3 Zambrano CajiasDocumento14 páginasTra Aut 1 3 Zambrano CajiasEsteban ZambranoAún no hay calificaciones
- Tra Pra 1 2Documento3 páginasTra Pra 1 2EDWIN ORLANDO QUISPE TOAQUIZAAún no hay calificaciones
- Balanceo de Rotores 4Documento7 páginasBalanceo de Rotores 4Ricardo CampaAún no hay calificaciones
- BalanceadoraDocumento28 páginasBalanceadoraPao JibaAún no hay calificaciones
- Vibration II Cap-12Documento35 páginasVibration II Cap-12JHON ANGEL VARGAS HUAHUASONCCOAún no hay calificaciones
- Documento - Completo - PDF Laberintos Rodete PDFDocumento6 páginasDocumento - Completo - PDF Laberintos Rodete PDFMartin Mario Cuartas OsorioAún no hay calificaciones
- Practica 9Documento7 páginasPractica 9Dayanna Hernandez SanchezAún no hay calificaciones
- 0081Documento6 páginas0081san9jos99de9la9rosa9Aún no hay calificaciones
- Parámetros de Diseño de Cimentación de Maquinarias PDFDocumento71 páginasParámetros de Diseño de Cimentación de Maquinarias PDFLuis Marcos100% (1)
- Desarrollo de Software para Balanceo Estático de RotoresDocumento6 páginasDesarrollo de Software para Balanceo Estático de RotoresMartin Lira EvansAún no hay calificaciones
- 4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaDocumento22 páginas4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaEnrique Fanes0% (1)
- Cap 6 Fema 440 ResumenDocumento12 páginasCap 6 Fema 440 ResumenJessy Paola CasaAún no hay calificaciones
- Evaluación de La Capacidad de Carga DinámicaDocumento8 páginasEvaluación de La Capacidad de Carga DinámicaRJ TolentinoAún no hay calificaciones
- Curvas características de bombas hidráulicasDocumento18 páginasCurvas características de bombas hidráulicasjuancarloscgAún no hay calificaciones
- Trabajo de Titulación-31-40Documento10 páginasTrabajo de Titulación-31-40Cristian HaroAún no hay calificaciones
- TecniDocumento8 páginasTecniejzuppelli8036Aún no hay calificaciones
- Data Turbogenerador Feb - 2021Documento10 páginasData Turbogenerador Feb - 2021ejzuppelli8036Aún no hay calificaciones
- Catalogo Masteres Nucleares DefDocumento9 páginasCatalogo Masteres Nucleares Defejzuppelli8036Aún no hay calificaciones
- Programación de Paradas de Plantas Con Carpetas de TrabajoDocumento13 páginasProgramación de Paradas de Plantas Con Carpetas de Trabajoejzuppelli8036Aún no hay calificaciones
- Data operacional turbocompresores planta fraccionamientoDocumento15 páginasData operacional turbocompresores planta fraccionamientoejzuppelli8036Aún no hay calificaciones
- Data Turbogenerador Mar - 2021Documento11 páginasData Turbogenerador Mar - 2021ejzuppelli8036Aún no hay calificaciones
- Opr 00 LJMDocumento68 páginasOpr 00 LJMejzuppelli8036Aún no hay calificaciones
- Actividades Del Ingeniero de Confiabilidad OperacionalDocumento1 páginaActividades Del Ingeniero de Confiabilidad Operacionalejzuppelli8036Aún no hay calificaciones
- D1BO011503-PW0D3-MD13000 - A Estudio de Flexibilidad Linea Butanos Muelle 9 PFDJDocumento67 páginasD1BO011503-PW0D3-MD13000 - A Estudio de Flexibilidad Linea Butanos Muelle 9 PFDJejzuppelli8036Aún no hay calificaciones
- Grados de IndeterminacionDocumento8 páginasGrados de IndeterminacionEdwin EajvilAún no hay calificaciones
- Informe Linea Ibutano MuelleDocumento12 páginasInforme Linea Ibutano Muelleejzuppelli8036Aún no hay calificaciones
- 4 Estatica Vinculos GsDocumento41 páginas4 Estatica Vinculos GsjfcalamaAún no hay calificaciones
- Data operacional turbocompresores planta fraccionamientoDocumento15 páginasData operacional turbocompresores planta fraccionamientoejzuppelli8036Aún no hay calificaciones
- Máster Propio en Rotating MachineryDocumento53 páginasMáster Propio en Rotating MachineryRafael EllesAún no hay calificaciones
- Ciencias Duras vs. Ciencias BlandasDocumento2 páginasCiencias Duras vs. Ciencias Blandasejzuppelli8036Aún no hay calificaciones
- Máster Propio en Rotating MachineryDocumento53 páginasMáster Propio en Rotating MachineryRafael EllesAún no hay calificaciones
- Constancia de Residencia (Sucre)Documento3 páginasConstancia de Residencia (Sucre)Ligia GamboaAún no hay calificaciones
- Reportes técnicos que generan valorDocumento11 páginasReportes técnicos que generan valorejzuppelli8036Aún no hay calificaciones
- Desincorp Rotor AP1Documento6 páginasDesincorp Rotor AP1ejzuppelli8036Aún no hay calificaciones
- Solución definitiva línea de isobutano 16-CA-908226-3CCDocumento13 páginasSolución definitiva línea de isobutano 16-CA-908226-3CCejzuppelli8036Aún no hay calificaciones
- Listado de piezas y precios para turbina de gasDocumento2 páginasListado de piezas y precios para turbina de gasejzuppelli8036Aún no hay calificaciones
- JTS Aero Energy Company Presentation - Venezuela.Espanol PDFDocumento14 páginasJTS Aero Energy Company Presentation - Venezuela.Espanol PDFejzuppelli8036Aún no hay calificaciones
- Las Mejores Habilidades Que Debes Poner en Tu CurrículumDocumento1 páginaLas Mejores Habilidades Que Debes Poner en Tu Currículumejzuppelli8036Aún no hay calificaciones
- Data Ejercicios 4.3-4.5Documento3 páginasData Ejercicios 4.3-4.5ejzuppelli8036Aún no hay calificaciones
- MDOF SheetDocumento44 páginasMDOF Sheetejzuppelli8036Aún no hay calificaciones
- MDOF SheetDocumento43 páginasMDOF Sheetejzuppelli8036Aún no hay calificaciones
- REPUESTOSDocumento10 páginasREPUESTOSejzuppelli8036Aún no hay calificaciones
- Configuración 1Documento87 páginasConfiguración 1ejzuppelli8036Aún no hay calificaciones
- Proyecto EB Junio 2012Documento5 páginasProyecto EB Junio 2012ejzuppelli8036Aún no hay calificaciones
- Tema 5. Variadores de Frecuencia: Tecnología Noticias Más Vendidos Productos Stock InicioDocumento22 páginasTema 5. Variadores de Frecuencia: Tecnología Noticias Más Vendidos Productos Stock Inicioerwin martinAún no hay calificaciones
- Propagación de Ondas en PozosDocumento36 páginasPropagación de Ondas en Pozosvelkus2013Aún no hay calificaciones
- ExamenDocumento2 páginasExamensamuelAún no hay calificaciones
- Determinación experimental de la velocidad del sonido en el aireDocumento12 páginasDeterminación experimental de la velocidad del sonido en el aireMaria Isabel Espichan VilcarromeroAún no hay calificaciones
- Espectro Electromagnetico PDFDocumento3 páginasEspectro Electromagnetico PDFjuanfra gallardoAún no hay calificaciones
- NC IEC 61000-6-2 Compatibilidad Electromagnética (EMC) - Parte 6. Sección 2. Normas Genéricas deDocumento17 páginasNC IEC 61000-6-2 Compatibilidad Electromagnética (EMC) - Parte 6. Sección 2. Normas Genéricas deErnesto Rojas AhAún no hay calificaciones
- Resumen Del Capítulo 16Documento4 páginasResumen Del Capítulo 16José Luis YauAún no hay calificaciones
- Ejs FisicaDocumento2 páginasEjs Fisicaangela torres martinAún no hay calificaciones
- Salinidad en El Riego Sel SueloDocumento18 páginasSalinidad en El Riego Sel SueloAlcocer Hidalgo MiguelAún no hay calificaciones
- Prueba Electrotecnia 1Documento19 páginasPrueba Electrotecnia 1jose_rubio_gonzalezAún no hay calificaciones
- Ciencias Técnicas y Aplicadas Artículo de Investigación: CorrespondenciaDocumento23 páginasCiencias Técnicas y Aplicadas Artículo de Investigación: CorrespondenciaDiego TorresAún no hay calificaciones
- Sep 8-1 LO MISMO QUE 6-7 Y 8Documento15 páginasSep 8-1 LO MISMO QUE 6-7 Y 8Price Sanchez JoseAún no hay calificaciones
- Modulación AM-DSBFC: Análisis de variaciones en el índice de modulaciónDocumento3 páginasModulación AM-DSBFC: Análisis de variaciones en el índice de modulaciónAndres David Ortiz HerreraAún no hay calificaciones
- NTC4325Documento32 páginasNTC4325Andrés Sepúlveda RiveraAún no hay calificaciones
- CAPITULOS 4 y 5Documento35 páginasCAPITULOS 4 y 5Samuel Garcia100% (1)
- Pulso y frecuencia cardiaca: factores que afectan y cómo medirDocumento37 páginasPulso y frecuencia cardiaca: factores que afectan y cómo medirIsabel CantoAún no hay calificaciones
- Faluta LabialDocumento7 páginasFaluta LabialCristian Caraballo MonterrosaAún no hay calificaciones
- Tesis Final, Sergio Ruiz, Escucha y ResonanciaDocumento144 páginasTesis Final, Sergio Ruiz, Escucha y ResonanciaVerónica MontenegroAún no hay calificaciones
- TFG Jesus Iriz GonzalezDocumento87 páginasTFG Jesus Iriz GonzalezBarzi JeronimoAún no hay calificaciones
- La Visión y Fenómenos OndulatoriosDocumento24 páginasLa Visión y Fenómenos OndulatoriosIsabel Poyato HolgadoAún no hay calificaciones
- Lenze 8100 TraduccionDocumento20 páginasLenze 8100 TraduccionPatricio Antonio Cortés PeñaAún no hay calificaciones
- Informe Practica 6Documento35 páginasInforme Practica 6ajaAún no hay calificaciones
- 1a-Fíica-17 AgotoDocumento6 páginas1a-Fíica-17 AgotoBriankaAún no hay calificaciones
- LAB01 - Electronica AnalogicaDocumento12 páginasLAB01 - Electronica AnalogicaCesar Agusto Choque MamaniAún no hay calificaciones
- EM-4055 telurómetro inteligenteDocumento3 páginasEM-4055 telurómetro inteligenteMercedes Canaza ZavalaAún no hay calificaciones
- Introducción a la Petrofísica: Propiedades de las RocasDocumento15 páginasIntroducción a la Petrofísica: Propiedades de las RocasJhasmani AmcAún no hay calificaciones
- Laboratorio Velocidad Del SonidoDocumento6 páginasLaboratorio Velocidad Del SonidoJuan Camilo Alean GuzmanAún no hay calificaciones
- Efecto Doppler relativistaDocumento28 páginasEfecto Doppler relativistaAgustinaGonzález0% (1)
- Reflexión Del SonidoDocumento19 páginasReflexión Del SonidoPaola SaldíasAún no hay calificaciones
- INTRODUCCIONDocumento3 páginasINTRODUCCIONPiero AlonsoAún no hay calificaciones