También podría gustarte
- Robotica IndustrialDocumento46 páginasRobotica IndustrialJosé Antonio Velásquez CostaAún no hay calificaciones
- Robotica IndustrialDocumento35 páginasRobotica IndustrialGloria ChirinosAún no hay calificaciones
- Taller de Simulacion y Programación de Robots IndustrialesDocumento38 páginasTaller de Simulacion y Programación de Robots IndustrialesnessssaAún no hay calificaciones
- Robot Morfología GuíaDocumento10 páginasRobot Morfología GuíaphillamxAún no hay calificaciones
- Diagnóstico necesidades aprendizaje automatización planta reciclajeDocumento19 páginasDiagnóstico necesidades aprendizaje automatización planta reciclajeMarlyn GiraldoAún no hay calificaciones
- Morfología del robot: estructura, transmisiones, actuadores y sensoresDocumento18 páginasMorfología del robot: estructura, transmisiones, actuadores y sensoresAnthony012429 LaraAún no hay calificaciones
- Tamaño y Potencia de Un Robot IndustrialDocumento11 páginasTamaño y Potencia de Un Robot IndustrialdarwinAún no hay calificaciones
- Practica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionDocumento19 páginasPractica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionAlex Guamán EspinozaAún no hay calificaciones
- Robots y sus clasificacionesDocumento143 páginasRobots y sus clasificacionesAlejandro VegaAún no hay calificaciones
- Sistema brazo robotico industrialDocumento89 páginasSistema brazo robotico industrialLuis AvilaAún no hay calificaciones
- Tema II - Asigancion - BorradorDocumento9 páginasTema II - Asigancion - BorradorMisael Miguel Matos DíazAún no hay calificaciones
- Manipulador Serial CilindricoDocumento6 páginasManipulador Serial CilindricoCinthia RosasAún no hay calificaciones
- Unidad 1 Morfologia Del RobotDocumento33 páginasUnidad 1 Morfologia Del RobotFrancisco Armando Gamboa PinedaAún no hay calificaciones
- Diplomado - ROBOTICA INDUSTRIAL PDFDocumento40 páginasDiplomado - ROBOTICA INDUSTRIAL PDFrimce77Aún no hay calificaciones
- Tema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesDocumento22 páginasTema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesYami CortezAún no hay calificaciones
- Ss 22Documento65 páginasSs 22jhony wallaAún no hay calificaciones
- T1 Robotica Industrial - ServomotoresDocumento83 páginasT1 Robotica Industrial - Servomotoressilverio17antezanaAún no hay calificaciones
- Morfologa de Los Robots Manipuladores 151029220815 Lva1 App6891Documento22 páginasMorfologa de Los Robots Manipuladores 151029220815 Lva1 App6891wphisicistAún no hay calificaciones
- Robótica Unidad1Documento60 páginasRobótica Unidad1Roberto Magaña GarciaAún no hay calificaciones
- Motores Especiales: Polos sombreados, pasos, servos y linealesDocumento33 páginasMotores Especiales: Polos sombreados, pasos, servos y linealesTachi64Aún no hay calificaciones
- Robots Manipuladores y MovilesDocumento20 páginasRobots Manipuladores y MovilesNo pss..Aún no hay calificaciones
- Medicion de La Posicion Rev1Documento37 páginasMedicion de La Posicion Rev1Termozipa I&CAún no hay calificaciones
- Robotica Producto 2 Cristian Ossiel Ortiz Quintana 18848Documento10 páginasRobotica Producto 2 Cristian Ossiel Ortiz Quintana 18848Cristian OrtizAún no hay calificaciones
- Robotica Industrial 2 2014Documento49 páginasRobotica Industrial 2 2014Braulio ValdesAún no hay calificaciones
- SERVOMOTORESDocumento13 páginasSERVOMOTORESRaul HERNÁNDEZAún no hay calificaciones
- Robotica Unidad 1 RecuperacionDocumento19 páginasRobotica Unidad 1 RecuperacionJorge Fabian GualteroAún no hay calificaciones
- Estructura Mecánica Del RobotDocumento67 páginasEstructura Mecánica Del RobotjoshuaAún no hay calificaciones
- Tecnologia de La RoboticaDocumento17 páginasTecnologia de La RoboticaIng. Víctor GarzaAún no hay calificaciones
- Marco Teorico PDFDocumento11 páginasMarco Teorico PDFARMANDO GAYTAN SOSAAún no hay calificaciones
- Tema 01b Morfología Del Robot ManipuladorDocumento21 páginasTema 01b Morfología Del Robot Manipuladordalton yañezAún no hay calificaciones
- Fundamentos de Robótica IndustrialDocumento11 páginasFundamentos de Robótica IndustrialmariadignoraAún no hay calificaciones
- Configuraciones de Los RobotsDocumento14 páginasConfiguraciones de Los RobotsAmauri MoránAún no hay calificaciones
- Capitulo 3 COMPONENTES DEL ROBOTDocumento59 páginasCapitulo 3 COMPONENTES DEL ROBOTDanny LopezAún no hay calificaciones
- Robotica IndustrialDocumento138 páginasRobotica IndustrialJeans Marco Nassi CernaAún no hay calificaciones
- ServomecanismoDocumento3 páginasServomecanismoMahecha Lozano Laura MichellAún no hay calificaciones
- Clasificacion y Estructura MecanicaDocumento85 páginasClasificacion y Estructura MecanicaJoel JalezAún no hay calificaciones
- Manufactura Asistida Por Computadora: PLC Y Introducción A La RobóticaDocumento50 páginasManufactura Asistida Por Computadora: PLC Y Introducción A La RobóticaJhajaira VieiraAún no hay calificaciones
- MecanismosDocumento38 páginasMecanismosDylan MedranoAún no hay calificaciones
- Investigacion de Servomotores y Motores de PasoDocumento5 páginasInvestigacion de Servomotores y Motores de PasoJuve Hernandez RojasAún no hay calificaciones
- Clasificacion, ComponentesDocumento76 páginasClasificacion, ComponentesCarlosLPAún no hay calificaciones
- COSIMIRDocumento28 páginasCOSIMIRJoseph0% (1)
- 2 RoboticaIndustrial MorfologiaDocumento54 páginas2 RoboticaIndustrial MorfologiaJorgeAún no hay calificaciones
- Fase 3 –Realizar Lluvia de IdeasDocumento9 páginasFase 3 –Realizar Lluvia de Ideasrobert santiago collazos bonillaAún no hay calificaciones
- Presentacion RoboticaDocumento27 páginasPresentacion RoboticaJezzi GLAún no hay calificaciones
- Tarea 1 RoboticaDocumento5 páginasTarea 1 RoboticaIsmael AguilarAún no hay calificaciones
- Estructura Mecanica de Un RobotDocumento21 páginasEstructura Mecanica de Un RobotPalmeras01Aún no hay calificaciones
- Introducción a la robótica: morfología, parámetros y aplicaciones de los robots industrialesDocumento46 páginasIntroducción a la robótica: morfología, parámetros y aplicaciones de los robots industrialesJuanAún no hay calificaciones
- Fase 2 Trabajo ColaborativoDocumento28 páginasFase 2 Trabajo Colaborativocesar sanchezAún no hay calificaciones
- Morfologia de Los RobotsDocumento7 páginasMorfologia de Los RobotsJose A100% (1)
- Introducción A La RobóticaDocumento32 páginasIntroducción A La Robóticamrtaz007Aún no hay calificaciones
- Robotica IndustrialDocumento19 páginasRobotica Industrialrivac85Aún no hay calificaciones
- Tarea 14-15Documento68 páginasTarea 14-15Michael ThebbesiAún no hay calificaciones
- OptativaDocumento9 páginasOptativamiguelAún no hay calificaciones
- Robotica MecanismosDocumento7 páginasRobotica MecanismosMarcl Andrs SampdroAún no hay calificaciones
- Control de Sistemas Robotizados - Resumen Unidad 2Documento24 páginasControl de Sistemas Robotizados - Resumen Unidad 2BesayAún no hay calificaciones
- Ensayo Aplicaciones Roboticas IndustrialesDocumento3 páginasEnsayo Aplicaciones Roboticas IndustrialesAndy Salan100% (1)
- Introduccion RoboticaDocumento106 páginasIntroduccion RoboticaArturo Tapia100% (1)
- 2 Componentes de Un Robot IndustrialDocumento26 páginas2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- Actividades A Realizar en La Semana 12 (Automatización Industrial)Documento2 páginasActividades A Realizar en La Semana 12 (Automatización Industrial)DanielAlamoAún no hay calificaciones
- Robotica IndustrialDocumento31 páginasRobotica IndustrialDanielAlamoAún no hay calificaciones
- 1.1 Elec PDFDocumento42 páginas1.1 Elec PDFMary MitchellAún no hay calificaciones
- Unidad II Manufactura y Disec3a6o Asistido Por Computadora - PPSXDocumento77 páginasUnidad II Manufactura y Disec3a6o Asistido Por Computadora - PPSXAnonymous k00pxOE7fAún no hay calificaciones
- Tecnologia EmergentesDocumento42 páginasTecnologia EmergentesAlejandroGersonGayosoAlfaroAún no hay calificaciones
- Robotica Parte 3Documento40 páginasRobotica Parte 3DanielAlamo100% (1)
- Sensores IndustrialesDocumento24 páginasSensores IndustrialesDanielAlamoAún no hay calificaciones
- Sem 13 Evaluaciones de Impacto AmbientalDocumento11 páginasSem 13 Evaluaciones de Impacto AmbientalJhordy Maycol Rodas QuirozAún no hay calificaciones
- Sem 06 Contaminación de Las AguasDocumento16 páginasSem 06 Contaminación de Las AguasVictor AlvarezAún no hay calificaciones
- Contaminación del suelo: fuentes, efectos y prevenciónDocumento7 páginasContaminación del suelo: fuentes, efectos y prevenciónDanielAlamoAún no hay calificaciones
- Barrera Valenzuela Macarena AndreaDocumento274 páginasBarrera Valenzuela Macarena AndreaEdilson Andres GonzalezAún no hay calificaciones
- Sem 04 Industria y Lluvia ÁcidaDocumento8 páginasSem 04 Industria y Lluvia ÁcidaLucciana Bambaren MauricciAún no hay calificaciones
- Índice de Nocividad de los Combustibles (INCDocumento7 páginasÍndice de Nocividad de los Combustibles (INCDanielAlamoAún no hay calificaciones
- Ambiental 2Documento9 páginasAmbiental 2daphne_11Aún no hay calificaciones
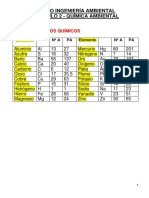
- Cap 02 - Química Ambiental para Exponer PDFDocumento17 páginasCap 02 - Química Ambiental para Exponer PDFDanielAlamoAún no hay calificaciones
- Sem 09 Efectos de Los ContaminantesDocumento5 páginasSem 09 Efectos de Los ContaminantesDanielAlamoAún no hay calificaciones
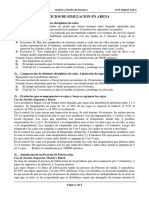
- EjerciciosDirigidos Arena AnalisiYDisenoDeSistemas 20152 PDFDocumento4 páginasEjerciciosDirigidos Arena AnalisiYDisenoDeSistemas 20152 PDFNeoElfeoAún no hay calificaciones
- SEM 03 - VSM (Parte II)Documento6 páginasSEM 03 - VSM (Parte II)DanielAlamoAún no hay calificaciones
- Sem 10 - SmedDocumento37 páginasSem 10 - SmedDanielAlamoAún no hay calificaciones
- Contaminación del suelo: fuentes, efectos y prevenciónDocumento7 páginasContaminación del suelo: fuentes, efectos y prevenciónDanielAlamoAún no hay calificaciones
- Sem 10 - SmedDocumento37 páginasSem 10 - SmedDanielAlamoAún no hay calificaciones
- Sem 13 - Jit KanbanDocumento27 páginasSem 13 - Jit KanbanDanielAlamoAún no hay calificaciones
- SEM 11 - Heijunka RFSDocumento33 páginasSEM 11 - Heijunka RFSDanielAlamoAún no hay calificaciones
- Identificar oportunidades de negocio a través del análisis de valorDocumento43 páginasIdentificar oportunidades de negocio a través del análisis de valorLuisa Francesca Bambaren MauricciAún no hay calificaciones
- ME2021 - GR01 - TIMWOOD - Grupo 6Documento15 páginasME2021 - GR01 - TIMWOOD - Grupo 6DanielAlamoAún no hay calificaciones
- Experiment OsDocumento22 páginasExperiment OsDanielAlamoAún no hay calificaciones
- Sem 09 - TPMDocumento42 páginasSem 09 - TPMDanielAlamoAún no hay calificaciones
- MINADocumento6 páginasMINADanielAlamoAún no hay calificaciones
- RECTODocumento2 páginasRECTODanielAlamoAún no hay calificaciones
- CompresoresDocumento23 páginasCompresoresKike Martinez AtzompaAún no hay calificaciones
- Física 2 - Momento de inercia y torsiónDocumento13 páginasFísica 2 - Momento de inercia y torsiónBELLO AMORAún no hay calificaciones
- Analisis Estructural - Kani y Lineas de FluenciasDocumento40 páginasAnalisis Estructural - Kani y Lineas de FluenciasOsman Ernesto Orozco IglesiasAún no hay calificaciones
- Compresores ReciprocantesDocumento35 páginasCompresores ReciprocantesGoyho Castillo100% (30)
- Las Válvulas y Sus AplicacionesDocumento20 páginasLas Válvulas y Sus AplicacionesPaula CobainAún no hay calificaciones
- Que Es TensiónDocumento6 páginasQue Es TensiónJORGE MARIO GONZALEZ CARDONAAún no hay calificaciones
- 07.1. Memoria de Calculo EstructuralDocumento42 páginas07.1. Memoria de Calculo EstructuralAngel Carrasco AyalaAún no hay calificaciones
- Poster de MRUDocumento1 páginaPoster de MRUKARENIS VALENTINA PEREZ RODRIGUEZAún no hay calificaciones
- Ondas SismicasDocumento2 páginasOndas Sismicaserlin_corderoAún no hay calificaciones
- 2da Condicion de EquilibrioDocumento5 páginas2da Condicion de EquilibrioEdson Luis Egusquiza CordovaAún no hay calificaciones
- PLT-04 Calorimetría IAI ULLDocumento15 páginasPLT-04 Calorimetría IAI ULLDAVID RADAAún no hay calificaciones
- Práctica 5 Obtención Experimental de La Frecuencia Natural de Un Sistema Masa ResorteDocumento6 páginasPráctica 5 Obtención Experimental de La Frecuencia Natural de Un Sistema Masa ResorteAlainIslasAún no hay calificaciones
- Bombeo MecanicoDocumento20 páginasBombeo MecanicoLuis PeceroAún no hay calificaciones
- Clase - Semana 4 V3Documento48 páginasClase - Semana 4 V3Marcela Sofia Henriquez OrellanaAún no hay calificaciones
- Mflu2 PC1Documento2 páginasMflu2 PC1Denis BrañezAún no hay calificaciones
- Práctica 5 Cinemática y DinámicaDocumento11 páginasPráctica 5 Cinemática y DinámicadricardocanAún no hay calificaciones
- Procesos de manufactura laminación y extrusiónDocumento2 páginasProcesos de manufactura laminación y extrusiónduvan pinillaAún no hay calificaciones
- Ejercicio físico estructuraDocumento36 páginasEjercicio físico estructuraVictor Sánchez AguilarAún no hay calificaciones
- Generador Hyundai Hy-42ch 42 Kva 380 v. Diesel P.electrica-0Documento11 páginasGenerador Hyundai Hy-42ch 42 Kva 380 v. Diesel P.electrica-0Rodri GonzalezAún no hay calificaciones
- Resistencia de MaterialesDocumento19 páginasResistencia de MaterialesalmaAún no hay calificaciones
- 100000I92N GestionDeMantenimientoDocumento5 páginas100000I92N GestionDeMantenimientoJesus NizamaAún no hay calificaciones
- Movimiento rectilíneo: posición, velocidad y aceleraciónDocumento4 páginasMovimiento rectilíneo: posición, velocidad y aceleraciónronhyAún no hay calificaciones
- Semana 6-Sesión 1Documento37 páginasSemana 6-Sesión 1José María Contreras LaderaAún no hay calificaciones
- Simulación y Medición de Magnitudes Físicas Presentes enDocumento48 páginasSimulación y Medición de Magnitudes Físicas Presentes enconcordia1000Aún no hay calificaciones
- Centrales termoeléctricas con turbinas de gasDocumento9 páginasCentrales termoeléctricas con turbinas de gasSegio David Jesus CastagneAún no hay calificaciones
- Cómo afectan TPV las moléculasDocumento2 páginasCómo afectan TPV las moléculasRaúl Mercado MartínezAún no hay calificaciones
- Control de AerogeneradoresDocumento85 páginasControl de AerogeneradoresnorkaAún no hay calificaciones
- Calculo de RefrigeracionDocumento11 páginasCalculo de RefrigeracionVictor OrtegaAún no hay calificaciones
- 10.1 Medición de Esfuerzos - in - SituDocumento47 páginas10.1 Medición de Esfuerzos - in - SituDsam IIAún no hay calificaciones