También podría gustarte
- Presentacion de TorsionDocumento16 páginasPresentacion de TorsionJuan Carlos PujolsAún no hay calificaciones
- 3.dinamica de Accionamiento Con Transmision #3Documento11 páginas3.dinamica de Accionamiento Con Transmision #3Luis Fernando DavilaAún no hay calificaciones
- Proyecto de Construcción de Una Máquina EléctricaDocumento8 páginasProyecto de Construcción de Una Máquina EléctricaReina CAún no hay calificaciones
- Movimiento Giratorio 7Documento57 páginasMovimiento Giratorio 7Nayiver RodriguezAún no hay calificaciones
- Medición de Momentos y CuplasDocumento3 páginasMedición de Momentos y CuplasrisegraAún no hay calificaciones
- Trabajo de TorsionDocumento10 páginasTrabajo de TorsionMaría FlowersAún no hay calificaciones
- Torque: Conocimientos Tecnologicos Aplicados Ciencias Basicas 1/2 Ref: Hcta Mec. Maquinaria PesadaDocumento11 páginasTorque: Conocimientos Tecnologicos Aplicados Ciencias Basicas 1/2 Ref: Hcta Mec. Maquinaria PesadaFERNANDO INOCENTE TRINIDAD GUERRAAún no hay calificaciones
- Frenos, Embragues y AcoplamientosDocumento5 páginasFrenos, Embragues y Acoplamientosgabonilsen0% (1)
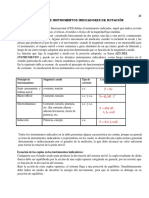
- 5 Dinamica de Los Instrumentos Indicadores de RotacionDocumento41 páginas5 Dinamica de Los Instrumentos Indicadores de Rotacionmilton rafael soriaAún no hay calificaciones
- Electrotecnia - Proteccion de MotoresDocumento16 páginasElectrotecnia - Proteccion de MotoresAnalia Yeruti GaleanoAún no hay calificaciones
- Práctica de Sistema de Una TransmisiónDocumento17 páginasPráctica de Sistema de Una TransmisiónVictoria BarraganAún no hay calificaciones
- Cuestionario de La Unidad 2Documento2 páginasCuestionario de La Unidad 2Jairo JairAún no hay calificaciones
- Trabjo de Embragues y Frenos. FinalDocumento42 páginasTrabjo de Embragues y Frenos. Finalanny DomínguezAún no hay calificaciones
- Resistencia de MaterialesDocumento13 páginasResistencia de MaterialesJ Miguel HEAún no hay calificaciones
- Dinamometro de Friccion MecanicaDocumento4 páginasDinamometro de Friccion MecanicaDiego Alejandro Muñoz Pimentel50% (2)
- Freno de PronyDocumento3 páginasFreno de PronyRuda JoseAún no hay calificaciones
- Volantes de InerciaDocumento9 páginasVolantes de InerciaGonz RomeroAún no hay calificaciones
- Generador Electrico de C.C.Documento8 páginasGenerador Electrico de C.C.carlos riveraAún no hay calificaciones
- 7 TorsiónDocumento11 páginas7 TorsiónMario FerndezAún no hay calificaciones
- El TorsiómetroDocumento9 páginasEl TorsiómetroHernan MauroAún no hay calificaciones
- Ensayo de Friccion en BandasDocumento12 páginasEnsayo de Friccion en BandasKelys VargasAún no hay calificaciones
- Embragues y Frenos de Aro Con Zapatas InterioresDocumento12 páginasEmbragues y Frenos de Aro Con Zapatas InterioresDavid Rivera TapiaAún no hay calificaciones
- Unidad 2 TorsionDocumento22 páginasUnidad 2 Torsiondanacaste2021Aún no hay calificaciones
- Tema 6 Motores de Corriente Contínua PDFDocumento24 páginasTema 6 Motores de Corriente Contínua PDFAleandro Zapata PetitAún no hay calificaciones
- Expocision Super CoolDocumento14 páginasExpocision Super CoolFabian DuranAún no hay calificaciones
- Péndulo de TorsiónDocumento9 páginasPéndulo de TorsiónJosue DelgadoAún no hay calificaciones
- Dinamica de Maquinas Rotativas PDFDocumento8 páginasDinamica de Maquinas Rotativas PDFJuan BasantesAún no hay calificaciones
- Ensayo de Torsion PPT (2) 100%2Documento17 páginasEnsayo de Torsion PPT (2) 100%2Daniel CarlosAún no hay calificaciones
- Movimiento GiratorioDocumento47 páginasMovimiento GiratorioJorge MillanAún no hay calificaciones
- TP - Embragues y FrenosDocumento49 páginasTP - Embragues y FrenosGaston CortezAún no hay calificaciones
- Maquina Simple y Su EvolucionDocumento20 páginasMaquina Simple y Su EvolucionEnkeli Raziel100% (3)
- A8MAECDocumento12 páginasA8MAECBrandon Cruz EscobedoAún no hay calificaciones
- INSTRUMENTOS DE MEDICIÒN de TorsionDocumento15 páginasINSTRUMENTOS DE MEDICIÒN de TorsionMonica Cabrera Soto100% (4)
- Compactadora de Latas Aparato de Aplicacion Tecnologica-CorregidaDocumento6 páginasCompactadora de Latas Aparato de Aplicacion Tecnologica-CorregidacaravecaAún no hay calificaciones
- Expo TorsionDocumento9 páginasExpo TorsionROBINSON WILLIAN URRUTIA ORELLANAAún no hay calificaciones
- Foro Tematico N°1Documento9 páginasForo Tematico N°1xd S:Aún no hay calificaciones
- Investigación Par y FuerzaDocumento3 páginasInvestigación Par y FuerzaOscar De Leon AvelarAún no hay calificaciones
- Ejes de Transmisión de PoleaDocumento22 páginasEjes de Transmisión de PoleaMiguel DominguezAún no hay calificaciones
- Resumen EjesDocumento5 páginasResumen EjesIlseSarahiMartinezAún no hay calificaciones
- Clase 13 y 14 (15) CORREGIDASDocumento5 páginasClase 13 y 14 (15) CORREGIDASGabriel VeraAún no hay calificaciones
- Ensayo de TorsionDocumento11 páginasEnsayo de TorsionJonathan Díaz CabreraAún no hay calificaciones
- Máquinas EléctricasDocumento19 páginasMáquinas EléctricasWillians NogueraAún no hay calificaciones
- Resumen de Sistema de FrenoDocumento12 páginasResumen de Sistema de FrenopabloAún no hay calificaciones
- Medicion de TorqueDocumento19 páginasMedicion de TorqueKaren Bravo Villa0% (1)
- Frenos y Embragues PDFDocumento45 páginasFrenos y Embragues PDFMario Góngora100% (1)
- Ensayo de TorsionDocumento16 páginasEnsayo de TorsionSAENZ PAUCAR MIGUEL MELANIOAún no hay calificaciones
- Tarea 1-2 TorsiónDocumento5 páginasTarea 1-2 TorsiónAdrián RodríguezAún no hay calificaciones
- Trabajo y Potencia RotacionalesDocumento12 páginasTrabajo y Potencia RotacionalesBanelly Beltran50% (4)
- Diseño Por Rigidez y Análisis Dinámico RojasDocumento42 páginasDiseño Por Rigidez y Análisis Dinámico RojasRomulo Quiroz Herrera0% (2)
- Proyecto TorsionDocumento26 páginasProyecto TorsionbrayanAún no hay calificaciones
- 6º Clase - TorsionDocumento34 páginas6º Clase - TorsionJhair ToledoAún no hay calificaciones
- Máquinas Imples-15Documento31 páginasMáquinas Imples-15hejuradoAún no hay calificaciones
- Máquinas EléctricasDocumento20 páginasMáquinas EléctricasWillians NogueraAún no hay calificaciones
- Medidas Del Par MotorDocumento12 páginasMedidas Del Par MotorManuel Peralta BeltranAún no hay calificaciones
- Péndulo de TorsiónDocumento7 páginasPéndulo de TorsiónDaniel Tenezaca BejaranoAún no hay calificaciones
- Campo MagnéticoDocumento37 páginasCampo MagnéticoGeancarlos Solis AlvaresAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Matriz RotomoldeoDocumento3 páginasMatriz RotomoldeoJuanluis De La FuenteAún no hay calificaciones
- Rotational Molding Technology (001 052) .En - EsDocumento52 páginasRotational Molding Technology (001 052) .En - EsJuanluis De La FuenteAún no hay calificaciones
- Rotational Molding Technology (350 400) .En - Es PDFDocumento51 páginasRotational Molding Technology (350 400) .En - Es PDFJuanluis De La FuenteAún no hay calificaciones
- Rotational Molding Technology (250 300) .En - Es PDFDocumento51 páginasRotational Molding Technology (250 300) .En - Es PDFJuanluis De La FuenteAún no hay calificaciones
- Rotational Molding Technology (300 350) .En - Es PDFDocumento51 páginasRotational Molding Technology (300 350) .En - Es PDFJuanluis De La FuenteAún no hay calificaciones
- Rotational Molding Technology (100 150) .En - EsDocumento51 páginasRotational Molding Technology (100 150) .En - EsJuanluis De La FuenteAún no hay calificaciones
- Rotational-Molding-Technology (400-439) (1) .En - Es PDFDocumento40 páginasRotational-Molding-Technology (400-439) (1) .En - Es PDFJuanluis De La FuenteAún no hay calificaciones
- 6-Guía Tema 6 - Mediciones Higrotérmicas - 2020Documento31 páginas6-Guía Tema 6 - Mediciones Higrotérmicas - 2020Juanluis De La FuenteAún no hay calificaciones
- 8-Mediciones y Ensayos - Mediciones de Ruido - VF - PPT (Modo de Compatibilidad)Documento19 páginas8-Mediciones y Ensayos - Mediciones de Ruido - VF - PPT (Modo de Compatibilidad)Juanluis De La FuenteAún no hay calificaciones
- Generador de Vapor TP ListoDocumento21 páginasGenerador de Vapor TP ListoJuanluis De La FuenteAún no hay calificaciones
- Guía Interna Mediciones y Ensayos - 01 TracciónDocumento40 páginasGuía Interna Mediciones y Ensayos - 01 TracciónJuanluis De La FuenteAún no hay calificaciones
- Guía Interna Mediciones y Ensayos - 02 CompresiónDocumento31 páginasGuía Interna Mediciones y Ensayos - 02 CompresiónJuanluis De La FuenteAún no hay calificaciones
- Dismec Examen20191218Documento1 páginaDismec Examen20191218Juanluis De La FuenteAún no hay calificaciones
- Medicion Directa Tres VarillasDocumento2 páginasMedicion Directa Tres VarillasJuanluis De La FuenteAún no hay calificaciones
- Cola de Milano Comprovacion AnguloDocumento2 páginasCola de Milano Comprovacion AnguloJuanluis De La FuenteAún no hay calificaciones
- Anexo I Fundamentos Bomba Axial-FusionadoDocumento120 páginasAnexo I Fundamentos Bomba Axial-FusionadoJuanluis De La FuenteAún no hay calificaciones
- Ecuaciones Medidores FlujoDocumento2 páginasEcuaciones Medidores FlujoKaremZamoraAún no hay calificaciones
- Lantilla Ejercicio 2Documento15 páginasLantilla Ejercicio 2Sergio Delgado EscobedoAún no hay calificaciones
- Torsion en Ejes Estaticamente Indeterminados (Problemas)Documento9 páginasTorsion en Ejes Estaticamente Indeterminados (Problemas)'Cesar GuelAún no hay calificaciones
- Presentacion Internado Carlos Van BurenDocumento32 páginasPresentacion Internado Carlos Van BurenNataly FernandaAún no hay calificaciones
- Propiedades Mecanicas de Los MetalesDocumento21 páginasPropiedades Mecanicas de Los MetalesClaudia DávilaAún no hay calificaciones
- Diseno de DesarenadorDocumento8 páginasDiseno de Desarenadorusac185Aún no hay calificaciones
- Diseño Mecanico Ocw - RetenesDocumento40 páginasDiseño Mecanico Ocw - RetenesluisandradeAún no hay calificaciones
- 02 Ejercicios Hidrostática RRB AB AM PDFDocumento4 páginas02 Ejercicios Hidrostática RRB AB AM PDFLaura AtehortuaAún no hay calificaciones
- Informe de FluiodosDocumento23 páginasInforme de FluiodosSergio E. Mallqui GamarraAún no hay calificaciones
- Laboratorio Caida LibreDocumento19 páginasLaboratorio Caida LibreLaura Gomez ZuluagaAún no hay calificaciones
- Artículo TransferenciaDocumento5 páginasArtículo TransferenciaPool Flores RevillaAún no hay calificaciones
- Ejercicios Repaso Circuitos 3 ESO Sep 2011 Parte ADocumento9 páginasEjercicios Repaso Circuitos 3 ESO Sep 2011 Parte AIván Vizcaíno SánchezAún no hay calificaciones
- 2018 02 - FI Semana - 04 SESION 15Documento11 páginas2018 02 - FI Semana - 04 SESION 15Aimy Espinoza MendozaAún no hay calificaciones
- Fisica 2Documento2 páginasFisica 2Anghello VicenteAún no hay calificaciones
- Inducción ElectromagnéticaDocumento44 páginasInducción Electromagnéticajavier100% (1)
- Compresión-Análisis Estático 1 Compresión PLA Daniela-1Documento6 páginasCompresión-Análisis Estático 1 Compresión PLA Daniela-1TamikaAún no hay calificaciones
- 47c0 Ficha Tecnica Motor Mecanico Especificaciones v20170420Documento17 páginas47c0 Ficha Tecnica Motor Mecanico Especificaciones v20170420RAUL RODRIGUEZ CERROAún no hay calificaciones
- EtaticaDocumento4 páginasEtaticaMilitza RamosAún no hay calificaciones
- Numero de ReynoldsDocumento15 páginasNumero de ReynoldsClaudio Chavarria MendozaAún no hay calificaciones
- C 02a Mecanica de Rotura de Rocas Con ExplosivosDocumento104 páginasC 02a Mecanica de Rotura de Rocas Con Explosivosivan100% (1)
- Estructuras Metalicas Tema 16.ejerciciosDocumento12 páginasEstructuras Metalicas Tema 16.ejerciciosluisandradeAún no hay calificaciones
- Informe de Movimiento Armonico SimpleDocumento6 páginasInforme de Movimiento Armonico SimpleKevin Medrano OvandoAún no hay calificaciones
- Teorema de Steiner Con Explicación SencillaDocumento2 páginasTeorema de Steiner Con Explicación Sencillamejora continuaAún no hay calificaciones
- Problemas de OleohidraulicaDocumento10 páginasProblemas de OleohidraulicaJean CarlosAún no hay calificaciones
- Flexocompresión BiaxialDocumento11 páginasFlexocompresión BiaxialGaby Martinez100% (4)
- Act2 Estatica Equipo FeDocumento13 páginasAct2 Estatica Equipo FeManu21Aún no hay calificaciones
- Evidencia Evaluativa 1 (.)Documento13 páginasEvidencia Evaluativa 1 (.)Esteban MartínezAún no hay calificaciones
- Capitulo 8 Resumen TermodinamicaDocumento24 páginasCapitulo 8 Resumen TermodinamicaMariaAún no hay calificaciones
- Álgebra y Principios de FísicaDocumento2 páginasÁlgebra y Principios de Físicagael27% (11)