También podría gustarte
- Divergencia, Rotacional y LaplacianoDocumento13 páginasDivergencia, Rotacional y LaplacianoOsorio CesarAún no hay calificaciones
- Ecuación de Continuidad Expresada en Coordenadas CilíndricasDocumento4 páginasEcuación de Continuidad Expresada en Coordenadas Cilíndricasmaria rangel100% (1)
- Difusión en Una Película Líquida Descendent, Transferencia de Materia Por Convección ForzadaDocumento8 páginasDifusión en Una Película Líquida Descendent, Transferencia de Materia Por Convección ForzadaRogher Uluri Yana0% (1)
- Ecuaciones de VariacionDocumento19 páginasEcuaciones de VariacionCassandra GómezAún no hay calificaciones
- Asig. Transf. MaterDocumento14 páginasAsig. Transf. MaterJenny Gema Citizen VilesAún no hay calificaciones
- Apuntes Mec FluDocumento4 páginasApuntes Mec FluErick Jair ReyesAún no hay calificaciones
- Tarea Volumenes de ControlDocumento9 páginasTarea Volumenes de ControlRosa's TrainingAún no hay calificaciones
- Balance Diferencial de MomentumDocumento31 páginasBalance Diferencial de Momentumvenom_alex100% (1)
- Mecanica de FluidosDocumento51 páginasMecanica de Fluidosjulitofic75% (8)
- Ecuaciones de Cantidad de MovimientoDocumento18 páginasEcuaciones de Cantidad de MovimientoAlejandro Briceño100% (6)
- Asesorias FFTDocumento8 páginasAsesorias FFTHoracio SanchezAún no hay calificaciones
- Taller 2 Velasco RicardoDocumento20 páginasTaller 2 Velasco RicardoRina Licet Socompi AguilarAún no hay calificaciones
- Problema 3J2Documento8 páginasProblema 3J2Jose Antonio VazquezAún no hay calificaciones
- Capitulo 2 L1 (03-08-22) PDFDocumento38 páginasCapitulo 2 L1 (03-08-22) PDFFanny MartínezAún no hay calificaciones
- Quiz 4Documento4 páginasQuiz 4TatiPereaAún no hay calificaciones
- Cinemática 2D - Tiro OblicuoDocumento42 páginasCinemática 2D - Tiro OblicuoJuanAún no hay calificaciones
- Balances de MomentumDocumento31 páginasBalances de MomentumDaniel LiraAún no hay calificaciones
- Ecuación General de Transporte de MasaDocumento4 páginasEcuación General de Transporte de MasaJosue HernandezAún no hay calificaciones
- Hidrogeologia IIDocumento6 páginasHidrogeologia IICarolina GarcíaAún no hay calificaciones
- 08,02,23 EcuacionesDocumento2 páginas08,02,23 EcuacionesMariano Rafael Corona FloresAún no hay calificaciones
- Navier Stokes EcuationDocumento17 páginasNavier Stokes EcuationReyesHerreraSckalAún no hay calificaciones
- Trabajo de Fenomenos - 14-07Documento11 páginasTrabajo de Fenomenos - 14-07Quirod JavierAún no hay calificaciones
- Modelado Flujo de Película DescendenteDocumento23 páginasModelado Flujo de Película DescendenteAbraham PérezAún no hay calificaciones
- Ecuaciones Fluidos VDocumento8 páginasEcuaciones Fluidos VJAIME PAUL ARIAS BASANTESAún no hay calificaciones
- Perfilde VelocidadDocumento3 páginasPerfilde VelocidadFlavio LucesAún no hay calificaciones
- Física II Book Page 1Documento6 páginasFísica II Book Page 1Ars Arturo RGAún no hay calificaciones
- Dfa Res S2Documento3 páginasDfa Res S2Rodrigo ChavarryAún no hay calificaciones
- Ec. de Navier StokesDocumento9 páginasEc. de Navier Stokesraul hernandezAún no hay calificaciones
- Derivadas Parciales Complemento 3Documento6 páginasDerivadas Parciales Complemento 3Moisés VelásquezAún no hay calificaciones
- HidrocinematicaDocumento49 páginasHidrocinematicaAroni Barrios SaulAún no hay calificaciones
- Tarea - 10 - Ecuación de EnergíaDocumento5 páginasTarea - 10 - Ecuación de EnergíaRafael Loza GarcíaAún no hay calificaciones
- 21T7.II - Estudio Experimental de Flujos Granulares DensosDocumento14 páginas21T7.II - Estudio Experimental de Flujos Granulares DensosThomas OchoaAún no hay calificaciones
- Ecuacion de MovimientoDocumento23 páginasEcuacion de MovimientoCinthia FarfánAún no hay calificaciones
- Mo La Como Se: Fig. 1 Flujo en Las Proximidades de Una Pared Que Se Pone Bruscamente en MovimientoDocumento5 páginasMo La Como Se: Fig. 1 Flujo en Las Proximidades de Una Pared Que Se Pone Bruscamente en MovimientoJulio MenaAún no hay calificaciones
- El Operador NablaDocumento3 páginasEl Operador NablaAna Laura GonzálezAún no hay calificaciones
- Teoria 1 - Analisis Dimensional - ADocumento41 páginasTeoria 1 - Analisis Dimensional - AInformática Sede Regional TartagalAún no hay calificaciones
- Demostración Teorema de StockesDocumento3 páginasDemostración Teorema de StockesKEVIN HERNANDO BELTRAN MARTINEZAún no hay calificaciones
- Dinamica 1Documento53 páginasDinamica 1Jhony Francisco ZuñigaAún no hay calificaciones
- Proyecto Final Análisis y Métodos NuméricosDocumento7 páginasProyecto Final Análisis y Métodos NuméricosalexAún no hay calificaciones
- Investigacion FundamentosDocumento22 páginasInvestigacion FundamentosMiguel VillatoroAún no hay calificaciones
- Ecuacion de La Continuidad Por Medio de Un ParalilepipedoDocumento15 páginasEcuacion de La Continuidad Por Medio de Un ParalilepipedoOasis RAún no hay calificaciones
- Práctica No. 4 - Acosta - VasquezDocumento15 páginasPráctica No. 4 - Acosta - VasquezMat EnriqueAún no hay calificaciones
- Tarea Semana 6 Matematica IntegradaDocumento14 páginasTarea Semana 6 Matematica IntegradaALEXANDRA IRENE DEL AGUILA MENDOZAAún no hay calificaciones
- Ejercicios Resueltos Sobre El M Todo de Integraci N Por PartesDocumento4 páginasEjercicios Resueltos Sobre El M Todo de Integraci N Por Partescasimirocamila3Aún no hay calificaciones
- 10.B.2 Ejercicio (Bird)Documento4 páginas10.B.2 Ejercicio (Bird)Gabriela ZelayaAún no hay calificaciones
- FÍSICA Cinemática 2DDocumento42 páginasFÍSICA Cinemática 2DLoana MartinAún no hay calificaciones
- Sistema 11ecuacionesDocumento6 páginasSistema 11ecuacionesnelson miguel lopez aguileraAún no hay calificaciones
- Práctica 2 Mecanica de FluidosDocumento12 páginasPráctica 2 Mecanica de FluidosBenja AstudilloAún no hay calificaciones
- Ejemplos TensoresDocumento4 páginasEjemplos TensoresDoctor CaguamónAún no hay calificaciones
- Examen Argumentativo T4R PDFDocumento5 páginasExamen Argumentativo T4R PDFFernando Elizalde RamirezAún no hay calificaciones
- Cambio de Variable en Integrales TriplesDocumento2 páginasCambio de Variable en Integrales TriplesGerardo Lira VargasAún no hay calificaciones
- Document 2Documento7 páginasDocument 2Ailybb ApminathorAún no hay calificaciones
- Metodo Elementos FinitosDocumento11 páginasMetodo Elementos FinitosrausaaAún no hay calificaciones
- Tablas 10.2 BirdDocumento3 páginasTablas 10.2 BirdLizbeth Alejandra Rodriguez MoralesAún no hay calificaciones
- Ecuacion de Avance FrontalDocumento4 páginasEcuacion de Avance FrontalStephanie TapiaAún no hay calificaciones
- Resumen de Mecánica de Los FluidosDocumento80 páginasResumen de Mecánica de Los FluidosJulian SarmientoAún no hay calificaciones
- Ejercicios Ecuación de Nernst - Sánchez AlcocerDocumento8 páginasEjercicios Ecuación de Nernst - Sánchez AlcocerEdicely EVAún no hay calificaciones
- Problemas Propuestos Segundo ConsolidadoDocumento2 páginasProblemas Propuestos Segundo ConsolidadoEdicely EVAún no hay calificaciones
- Laboratorio - Marco TeóricoDocumento7 páginasLaboratorio - Marco TeóricoEdicely EVAún no hay calificaciones
- 1 Laboratorio Sobre El Coeficiente de ConvecciónDocumento22 páginas1 Laboratorio Sobre El Coeficiente de ConvecciónEdicely EVAún no hay calificaciones
- 2-Grupo Chemical - Laboratorio de Determinacion de ViscosidadDocumento22 páginas2-Grupo Chemical - Laboratorio de Determinacion de ViscosidadEdicely EVAún no hay calificaciones
- Problemas Propuestos Fenómenos de TransporteDocumento3 páginasProblemas Propuestos Fenómenos de TransporteEdicely EVAún no hay calificaciones
- Modelo Matematico Rivera Jacay DeyaniraDocumento26 páginasModelo Matematico Rivera Jacay DeyaniraEdicely EVAún no hay calificaciones
- Montgomery Diseño y Análisis de ExperimentosDocumento692 páginasMontgomery Diseño y Análisis de ExperimentosEdicely EVAún no hay calificaciones
- Ejercicios de Aplicación de La La Ley de Debye-HückelDocumento9 páginasEjercicios de Aplicación de La La Ley de Debye-HückelEdicely EVAún no hay calificaciones
- Primer Parcial 2021-II SimulaciónDocumento1 páginaPrimer Parcial 2021-II SimulaciónEdicely EVAún no hay calificaciones
- Problema Del Tomate Flotante-Egoavil Vera EdycelyDocumento7 páginasProblema Del Tomate Flotante-Egoavil Vera EdycelyEdicely EVAún no hay calificaciones
- 1752-Texto Del Artículo-5141-2-10-20211019Documento14 páginas1752-Texto Del Artículo-5141-2-10-20211019GLORIA STHEFANYAún no hay calificaciones
- Instrumentacion Industrial DiapositivasDocumento79 páginasInstrumentacion Industrial DiapositivasEdicely EVAún no hay calificaciones
- Obtencion Del Modelo Matematico Del TiemDocumento30 páginasObtencion Del Modelo Matematico Del TiemMayeli Vasquez RivasAún no hay calificaciones
- Descripcion Lagrangiano y Euleriano - Egoavil Vera EdycelyDocumento4 páginasDescripcion Lagrangiano y Euleriano - Egoavil Vera EdycelyEdicely EVAún no hay calificaciones
- Primer Parcial 2021-II SimulaciónDocumento1 páginaPrimer Parcial 2021-II SimulaciónEdicely EVAún no hay calificaciones
- Obtencion Del Modelo Matematico Del TiemDocumento30 páginasObtencion Del Modelo Matematico Del TiemMayeli Vasquez RivasAún no hay calificaciones
- Manual Instrumentacion IndustrialDocumento68 páginasManual Instrumentacion IndustrialPilarNunajulcaTovar100% (2)
- Método de DesplazamientoDocumento6 páginasMétodo de DesplazamientoEdicely EV100% (1)
- Método de RadiaciónDocumento4 páginasMétodo de RadiaciónEdicely EVAún no hay calificaciones
- Descripcion Lagrangiano y Euleriano - Egoavil Vera EdycelyDocumento4 páginasDescripcion Lagrangiano y Euleriano - Egoavil Vera EdycelyEdicely EVAún no hay calificaciones
- Aplicación Del Diagrama PsicométricoDocumento7 páginasAplicación Del Diagrama PsicométricoEdicely EVAún no hay calificaciones
- Segundo Informe CorregidoDocumento7 páginasSegundo Informe CorregidoEdicely EVAún no hay calificaciones
- Densidad y Peso EspecificoDocumento31 páginasDensidad y Peso EspecificoEdicely EVAún no hay calificaciones
- 01 Introduccion A La Instrumentacion IndustrialDocumento7 páginas01 Introduccion A La Instrumentacion IndustrialEdicely EVAún no hay calificaciones
- Segundo Informe CorregidoDocumento7 páginasSegundo Informe CorregidoEdicely EVAún no hay calificaciones
- Aplicación Del Diagrama PsicométricoDocumento7 páginasAplicación Del Diagrama PsicométricoEdicely EVAún no hay calificaciones
- Método UniquacDocumento6 páginasMétodo UniquacEdicely EVAún no hay calificaciones
- 1752-Texto Del Artículo-5141-2-10-20211019Documento14 páginas1752-Texto Del Artículo-5141-2-10-20211019Edicely EVAún no hay calificaciones
- Practica de Piridina 1Documento5 páginasPractica de Piridina 1Edicely EVAún no hay calificaciones
- Sesion EstaticaDocumento14 páginasSesion EstaticaStiv ParckAún no hay calificaciones
- SLABO - Analisis Estructural 2019-IIDocumento5 páginasSLABO - Analisis Estructural 2019-IIMichael Fuentes Villalobos100% (1)
- Tarea 3 - Mileidy Nataly RamosDocumento32 páginasTarea 3 - Mileidy Nataly RamosCristian Andres MedinaAún no hay calificaciones
- TR1 Tecnologias de Procesos Industriales.Documento14 páginasTR1 Tecnologias de Procesos Industriales.Jose MonteiroAún no hay calificaciones
- Fs 8060061Documento1 páginaFs 8060061Yeferson ArcasAún no hay calificaciones
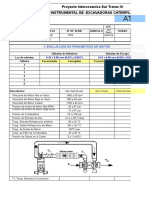
- Motor Caterpillar C18 Indm Acert Rating C RPM PDFDocumento7 páginasMotor Caterpillar C18 Indm Acert Rating C RPM PDFJulio César Turpo BustinzaAún no hay calificaciones
- Trabajo y EnergíaDocumento42 páginasTrabajo y EnergíaPamela NavarroAún no hay calificaciones
- Turbina Francis Turbina Francis: Ensayo Deturbina PeltonDocumento27 páginasTurbina Francis Turbina Francis: Ensayo Deturbina PeltonJorge BustamanteAún no hay calificaciones
- Tema 4 Mas y Ondas-2Documento66 páginasTema 4 Mas y Ondas-2Julia Martínez GavelaAún no hay calificaciones
- Tv2-Parte 1 (Procesos de Manufactura)Documento11 páginasTv2-Parte 1 (Procesos de Manufactura)JuanCárdenasDiazAún no hay calificaciones
- Estatica Mayorga Forero Cortes Avila T2Documento5 páginasEstatica Mayorga Forero Cortes Avila T2María Fernanda Cortes AvilaAún no hay calificaciones
- Termodinamica 5ta Edicion Yunus A Cengel Michael A Boles 729 744 PDFDocumento16 páginasTermodinamica 5ta Edicion Yunus A Cengel Michael A Boles 729 744 PDFostz albanAún no hay calificaciones
- Sistema Transmision Del AutoDocumento2 páginasSistema Transmision Del AutoEscuela4235100% (1)
- Centrífuga Icb TDL5M RefrigeradaDocumento3 páginasCentrífuga Icb TDL5M RefrigeradaMiriam GarcíaAún no hay calificaciones
- Informe MASDocumento13 páginasInforme MASJEAN ARNOLD HUAYTA FERNANDEZAún no hay calificaciones
- 329D - TPMDocumento8 páginas329D - TPMRICHARDAún no hay calificaciones
- Inform AcritudDocumento6 páginasInform AcritudMariel Yg100% (1)
- T Espe 031261 PDFDocumento470 páginasT Espe 031261 PDFJavierCornejoCarpioAún no hay calificaciones
- GUIA No 2 Termodinamica - Sustancias PurasDocumento4 páginasGUIA No 2 Termodinamica - Sustancias PurasJohnForeroAún no hay calificaciones
- Informe Modelado Matematico Sistemas MecanicosDocumento11 páginasInforme Modelado Matematico Sistemas MecanicosJonathan CruzAún no hay calificaciones
- Geometría VehicularDocumento20 páginasGeometría VehicularWilson Acosta Liñan50% (2)
- Metalurgia MecanicaDocumento54 páginasMetalurgia MecanicaIsrael Arubi GS0% (1)
- U3 Mantenimiento de FrenosDocumento19 páginasU3 Mantenimiento de FrenosDLR OmarssAún no hay calificaciones
- Impulso y Cantidad de MovimientoDocumento13 páginasImpulso y Cantidad de MovimientoJuan Manuel Guzman AlmeidaAún no hay calificaciones
- Icp CL 14 Surco FalconDocumento2 páginasIcp CL 14 Surco FalconLuis Enrique Surco FalconAún no hay calificaciones
- Manual de Ingeniería Pexgol - EspañolDocumento134 páginasManual de Ingeniería Pexgol - EspañolAnonymous h5uTxGvcAún no hay calificaciones
- Utp 84 FN Rev. 01Documento1 páginaUtp 84 FN Rev. 01EduardoCastilloAún no hay calificaciones
- Determinacion de GammaDocumento14 páginasDeterminacion de Gammamartin riojaAún no hay calificaciones
- Informe Tecnico t7x-878 - TymsacDocumento3 páginasInforme Tecnico t7x-878 - TymsacHAROLD MEJIAAún no hay calificaciones
- Ficha de Trabajo Resumen Sistemas MaterialesDocumento4 páginasFicha de Trabajo Resumen Sistemas MaterialesLeo MonteroAún no hay calificaciones