También podría gustarte
- Resolucion Taller 2 PDFDocumento8 páginasResolucion Taller 2 PDFjesusAún no hay calificaciones
- Datos ExperimentalesDocumento9 páginasDatos Experimentalesjuliana lassoAún no hay calificaciones
- Calculo IIIDocumento1 páginaCalculo IIIOscar Steven AngaritaAún no hay calificaciones
- Tarea I Cálculo VectorialDocumento7 páginasTarea I Cálculo VectorialStalyn EncarnacionAún no hay calificaciones
- Solucionario Calculo de Varias Variables 4Documento1 páginaSolucionario Calculo de Varias Variables 4miguel carlosAún no hay calificaciones
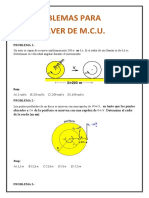
- Problemas para Resolver de M.C.U.Documento6 páginasProblemas para Resolver de M.C.U.dante mamaniAún no hay calificaciones
- Arcoiris de NewtonDocumento2 páginasArcoiris de Newtonjean carlos canales brunoAún no hay calificaciones
- Ciencias NaturalesoDocumento11 páginasCiencias NaturalesoChrystian LopezAún no hay calificaciones
- Galvanómetro Tangente (LFIS200)Documento12 páginasGalvanómetro Tangente (LFIS200)belenAún no hay calificaciones
- Ley de Enfriamiento TrabajoDocumento12 páginasLey de Enfriamiento TrabajoDYLAN ANDRES HERNANDEZ VIOLETAún no hay calificaciones
- Trabajo IntegradorDocumento11 páginasTrabajo IntegradorXavier TenesacaAún no hay calificaciones
- Calculo de VariacionesDocumento26 páginasCalculo de VariacionesOscar DiceAún no hay calificaciones
- Examen 2 Algebra Lineal - SupletorioDocumento1 páginaExamen 2 Algebra Lineal - SupletorioJuan Sebastián Navarro RincónAún no hay calificaciones
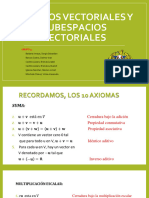
- ESPACIOS VECTORIALES - Version Final-1Documento30 páginasESPACIOS VECTORIALES - Version Final-1CARLOS EDUARDO CARDENAS GUEVARAAún no hay calificaciones
- POTENCIAL ELECTRICO Parte 1Documento18 páginasPOTENCIAL ELECTRICO Parte 1JoséJ.PereiraAún no hay calificaciones
- 44 Ejemplos de Momento Angular 2Documento6 páginas44 Ejemplos de Momento Angular 2Amosjose98Aún no hay calificaciones
- Calculo Zill AntiderivadasDocumento2 páginasCalculo Zill AntiderivadasDani Valverde50% (2)
- Distribucion Binomial Negativa Trabajo EscritoDocumento8 páginasDistribucion Binomial Negativa Trabajo EscritoAlexander Garatejo100% (1)
- Lectura Historia de Las FuncionesDocumento16 páginasLectura Historia de Las FuncionesKaren Rico DíazAún no hay calificaciones
- Taller de Ejercicios - Óptica GeométricaDocumento1 páginaTaller de Ejercicios - Óptica GeométricaFelipe EsAún no hay calificaciones
- 2 - Introduccion ElectrotecniaDocumento43 páginas2 - Introduccion ElectrotecniaGustavo BessoneAún no hay calificaciones
- SolucionarioDocumento6 páginasSolucionarioFrancisco Ospina ForeroAún no hay calificaciones
- Cálculo de Funciones Derivadas. Ejemplos y Ejercicios ResueltosDocumento13 páginasCálculo de Funciones Derivadas. Ejemplos y Ejercicios Resueltosanon_750782805Aún no hay calificaciones
- Mestanza.e Anna Dinámica Dinamica Lineal 07oct2019Documento12 páginasMestanza.e Anna Dinámica Dinamica Lineal 07oct2019Anna Mestanza EspinalAún no hay calificaciones
- Informe 1 Fis120Documento2 páginasInforme 1 Fis120Cristian AlfaroAún no hay calificaciones
- Metodo RaveorDocumento10 páginasMetodo RaveorDanniel BloomAún no hay calificaciones
- Problemario CorregidoDocumento33 páginasProblemario CorregidoAraceluchis De MedinaAún no hay calificaciones
- Actividad 2 MecanicaDocumento9 páginasActividad 2 MecanicaFrida Grandi LiceagaAún no hay calificaciones
- Problemas Resueltos de La Fisica de Resnick Halliday Dinamica de Las ParticulasDocumento10 páginasProblemas Resueltos de La Fisica de Resnick Halliday Dinamica de Las ParticulasfjcsAún no hay calificaciones
- Barbosa - Construcciones GeométricasDocumento35 páginasBarbosa - Construcciones GeométricasJ Julian RangelAún no hay calificaciones
- BiorritmoDocumento2 páginasBiorritmoRomerFirstAún no hay calificaciones
- Fisica General y Aplicada Mejorado (00000002) Modificado Por GonzaloDocumento108 páginasFisica General y Aplicada Mejorado (00000002) Modificado Por GonzalogonAún no hay calificaciones
- Potencial Efectivo y Energia CentrifugaDocumento5 páginasPotencial Efectivo y Energia CentrifugaShen Shun LeeAún no hay calificaciones
- Libro de Física - EjerciciosDocumento7 páginasLibro de Física - EjerciciosYhôrdhänAún no hay calificaciones
- Agelvezc Taller Módulo 2Documento4 páginasAgelvezc Taller Módulo 2Mariana CarvajalAún no hay calificaciones
- Diagramas de Cuerpo LibreDocumento6 páginasDiagramas de Cuerpo LibreJulio César Macías ZamoraAún no hay calificaciones
- Serie Integral TEMA 4Documento3 páginasSerie Integral TEMA 4Dafne GarciaAún no hay calificaciones
- Ejercicios Resueltos 2 y 3 Ley SenoDocumento5 páginasEjercicios Resueltos 2 y 3 Ley SenoMirandahAún no hay calificaciones
- Campo Electrico - Corona CircularDocumento3 páginasCampo Electrico - Corona Circularyoneiker molinaAún no hay calificaciones
- CN II Previa 1Documento2 páginasCN II Previa 1Ivonne Juliana Gonzalez MerchanAún no hay calificaciones
- C3 Parcial Grupo 5Documento22 páginasC3 Parcial Grupo 5Brandon Lopez MendezAún no hay calificaciones
- TP 1 Ejemplos Resueltos PDFDocumento4 páginasTP 1 Ejemplos Resueltos PDFjulian gonzalez0% (1)
- Informe 4 Lab 110 UTFSMDocumento9 páginasInforme 4 Lab 110 UTFSMGuillermo Vásquez100% (1)
- Ejercitacion para Completar en Clase Fuerzas y BaricentroDocumento37 páginasEjercitacion para Completar en Clase Fuerzas y BaricentroJhonatan Moya Paredez100% (1)
- Ecuaciones Diferenciales Segundo Orden No Homogeneas Coeficientes IndeterminadosDocumento18 páginasEcuaciones Diferenciales Segundo Orden No Homogeneas Coeficientes IndeterminadosAngel gonzalezAún no hay calificaciones
- Problema - 1.05b-07Documento2 páginasProblema - 1.05b-07Marco MelchorAún no hay calificaciones
- 4.ejercicios ElectrostaticaDocumento7 páginas4.ejercicios ElectrostaticaHenry Torres AlayaAún no hay calificaciones
- Original Fisica 2 Grupo3Documento10 páginasOriginal Fisica 2 Grupo3Limbert Poma CespedesAún no hay calificaciones
- Aplicaciones Prácticas de Sistemas de Ecuaciones LinealesDocumento6 páginasAplicaciones Prácticas de Sistemas de Ecuaciones LinealesLópez Vázquez Carlos YaelAún no hay calificaciones
- Fórmulas Geometria Analítica-CónicasDocumento2 páginasFórmulas Geometria Analítica-CónicasedatqAún no hay calificaciones
- Analisis Vectorial VectoresDocumento1 páginaAnalisis Vectorial VectoresÁngel Arsas NoctusAún no hay calificaciones
- Vectoriales Teo TarreaDocumento9 páginasVectoriales Teo TarreaMatias MartinAún no hay calificaciones
- Ejer4 7Documento2 páginasEjer4 7Jaime Andree Andree Jaime0% (1)
- Distribucion de LaplaceDocumento4 páginasDistribucion de LaplacekiraAún no hay calificaciones
- Flujo de Un Campo VectorialDocumento3 páginasFlujo de Un Campo VectorialRoy Huamaní GAún no hay calificaciones
- Molecula de AcetonaDocumento6 páginasMolecula de AcetonaERCRAún no hay calificaciones
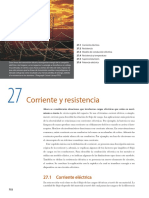
- Fisica para Ciencias e Ingenieria Serway 7ed Vol 2 Cap27Documento23 páginasFisica para Ciencias e Ingenieria Serway 7ed Vol 2 Cap27JAVIER ALEJANDRO CONTRERAS MORAAún no hay calificaciones
- Determinar Bajo Qué Dirección Debe Ser Lanzada Rectilíneamente Una Partícula Desde El Punto ADocumento2 páginasDeterminar Bajo Qué Dirección Debe Ser Lanzada Rectilíneamente Una Partícula Desde El Punto AJuan Carlos S QAún no hay calificaciones
- Semana 3. Sist Coord. en El Espacio PDFDocumento27 páginasSemana 3. Sist Coord. en El Espacio PDFNilson ChavezAún no hay calificaciones
- Losa Sin Viga 2D MDDocumento16 páginasLosa Sin Viga 2D MDJosue LopezAún no hay calificaciones
- Estudiantes de Concreto 2Documento1 páginaEstudiantes de Concreto 2Josue LopezAún no hay calificaciones
- FORMATODocumento4 páginasFORMATOJosue LopezAún no hay calificaciones
- Programa y Metodo DirectoDocumento63 páginasPrograma y Metodo DirectoJosue LopezAún no hay calificaciones
- Guias de Lab Hid2Documento71 páginasGuias de Lab Hid2Josue LopezAún no hay calificaciones
- Lista - Concreto IDocumento1 páginaLista - Concreto IJosue LopezAún no hay calificaciones
- Física Iii Universidad Nacional de IngenieriaDocumento15 páginasFísica Iii Universidad Nacional de IngenieriaJosue LopezAún no hay calificaciones
- Mapa MentalDocumento3 páginasMapa MentalJosue LopezAún no hay calificaciones
- Unidad Iii-Planificacion Del TransporteDocumento24 páginasUnidad Iii-Planificacion Del TransporteJosue LopezAún no hay calificaciones
- La Velocidad de Combinaci - 2Documento5 páginasLa Velocidad de Combinaci - 2Josue LopezAún no hay calificaciones
- Tipos de MatricesDocumento3 páginasTipos de MatricesJosue LopezAún no hay calificaciones
- Formularios Proceso No. 159-2020Documento11 páginasFormularios Proceso No. 159-2020Josue LopezAún no hay calificaciones
- Circuito RLCDocumento5 páginasCircuito RLCJosue LopezAún no hay calificaciones
- PRESENTACIONDocumento25 páginasPRESENTACIONJosue LopezAún no hay calificaciones
- RmatI Pres U1 Mar 2020 Parte 2Documento20 páginasRmatI Pres U1 Mar 2020 Parte 2Josue LopezAún no hay calificaciones
- Programacion en Codigos GDocumento32 páginasProgramacion en Codigos GBladimir Sarabia100% (8)
- PoliedrosDocumento5 páginasPoliedrosjenny hurtadoAún no hay calificaciones
- Gráficas Del Movimiento RectilíneoDocumento8 páginasGráficas Del Movimiento Rectilíneomariox2525Aún no hay calificaciones
- Campo Eléctrico Continuo - PREG RESUELTASDocumento3 páginasCampo Eléctrico Continuo - PREG RESUELTASariana jojojoAún no hay calificaciones
- Curso GeodesiaDocumento136 páginasCurso GeodesiaCristian Hc100% (1)
- Ejercicios PAU MatemáticasDocumento184 páginasEjercicios PAU MatemáticasmarceloAún no hay calificaciones
- Geometria Semana 2Documento3 páginasGeometria Semana 2tuganster12Aún no hay calificaciones
- Taller de SólidosDocumento7 páginasTaller de SólidosLácides Miguel Ramírez D.100% (1)
- Calculo Taller 1Documento32 páginasCalculo Taller 1Juan Castro FrancoAún no hay calificaciones
- Texto La CircunferenciaDocumento7 páginasTexto La CircunferenciaRaúl RojasAún no hay calificaciones
- Presentación SimetriaDocumento12 páginasPresentación SimetriaLucía SilvaAún no hay calificaciones
- La ParabolaDocumento8 páginasLa ParabolaCintia ChabaAún no hay calificaciones
- Geometria 3ºDocumento46 páginasGeometria 3ºJOSE ENRIQUE RIVERA SANCHEZAún no hay calificaciones
- Triangulos OblicuangulosDocumento45 páginasTriangulos OblicuangulosAlicia PiginoAún no hay calificaciones
- Dibujo Tecnico - BogoliúbovDocumento290 páginasDibujo Tecnico - BogoliúbovKlever Tigua77% (13)
- LINEA RECTA Analis 3Documento4 páginasLINEA RECTA Analis 3Thalía LizethAún no hay calificaciones
- P2. Rectas Perpendiculares y ParalelasDocumento4 páginasP2. Rectas Perpendiculares y Paralelasliz8akno0% (1)
- Historia Sucinta de La Matematica - Jose BabiniDocumento154 páginasHistoria Sucinta de La Matematica - Jose Babiniwilmer kreutzerAún no hay calificaciones
- Secuencia 23Documento5 páginasSecuencia 23Anel VillarrealAún no hay calificaciones
- SEGMENTOS Exa2Documento4 páginasSEGMENTOS Exa2Juan Diego Cutipa LoayzaAún no hay calificaciones
- Curso-Taller de Reforzamiento:: Introducción A La GeometríaDocumento20 páginasCurso-Taller de Reforzamiento:: Introducción A La GeometríaINGRID LHAún no hay calificaciones
- Ejercicios Sobre Aplicaciones Geométricas Geometría VectorialDocumento2 páginasEjercicios Sobre Aplicaciones Geométricas Geometría VectorialMaria StephanyAún no hay calificaciones
- Mecánica de Estructuras I Resistencia de MaterialesDocumento331 páginasMecánica de Estructuras I Resistencia de MaterialesJose AnguloAún no hay calificaciones
- MovimientoDocumento7 páginasMovimientoFátima Luciana Chun BriosoAún no hay calificaciones
- Laboratorio 1 Carreteras EspiralDocumento14 páginasLaboratorio 1 Carreteras EspiralBrandon airton Ávila nicolaAún no hay calificaciones
- Fisica Pre U Inv21 03 Cinematica CurvilineaDocumento4 páginasFisica Pre U Inv21 03 Cinematica CurvilineaBelen0% (1)
- Instructivo MatemáticaDocumento40 páginasInstructivo MatemáticaCamilo RestrepoAún no hay calificaciones
- Espacios MétricosDocumento29 páginasEspacios MétricosRodrigo HidalgoAún no hay calificaciones
- Apunts AcotacióDocumento10 páginasApunts Acotacióretrueke1170Aún no hay calificaciones
- Examen de Matematicas Primero de SecundariaDocumento7 páginasExamen de Matematicas Primero de SecundariaAna Veronica de GutierrezAún no hay calificaciones
![Cool Kids [Edición Estándar]](https://imgv2-1-f.scribdassets.com/img/word_document/492241565/149x198/717fae0fcb/1677215513?v=1)