También podría gustarte
- TM 1 Construcciones FundamentalesDocumento14 páginasTM 1 Construcciones FundamentalesLuis GAún no hay calificaciones
- DIBUJO TÉCNICO - Modelo 2012-2013Documento10 páginasDIBUJO TÉCNICO - Modelo 2012-2013poetasAún no hay calificaciones
- Tema 2. Construcciones FundamentalesDocumento10 páginasTema 2. Construcciones Fundamentalesjesus gil100% (1)
- Los 3 Primeros Poliedros RegularesDocumento7 páginasLos 3 Primeros Poliedros RegularesMiller Stiven Espinosa MuñozAún no hay calificaciones
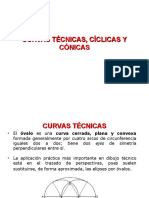
- Curvas TecnicasDocumento13 páginasCurvas Tecnicasjhon cruz paucarAún no hay calificaciones
- 15 - DT1 1Documento14 páginas15 - DT1 1Martin De JulianAún no hay calificaciones
- 13 - DT1 1Documento12 páginas13 - DT1 1Martin De JulianAún no hay calificaciones
- Otra Perspectiva ConicaDocumento17 páginasOtra Perspectiva ConicadevtasAún no hay calificaciones
- Homotecia LaminasDocumento3 páginasHomotecia LaminascheAún no hay calificaciones
- Ejercicios de Trazados FundamentalesDocumento5 páginasEjercicios de Trazados FundamentalesM. Victoria López FernándezAún no hay calificaciones
- Dibujo TecnicoIIJun05-06Documento10 páginasDibujo TecnicoIIJun05-06Leonard Carrasco Adrián100% (1)
- Apuntes - T02 Geometría Plana PolígonosDocumento11 páginasApuntes - T02 Geometría Plana PolígonosAlmudena Bah Beahache MontesAún no hay calificaciones
- Diedrico ArquitecturaDocumento129 páginasDiedrico ArquitecturaAdri GarciaAún no hay calificaciones
- Prog2bach Dibujo Tecnico IIDocumento21 páginasProg2bach Dibujo Tecnico IIHenryPerezAún no hay calificaciones
- Examen Dibujo Técnico II de La Comunidad de Madrid (Ordinaria de 2019) (WWW - Examenesdepau.com)Documento6 páginasExamen Dibujo Técnico II de La Comunidad de Madrid (Ordinaria de 2019) (WWW - Examenesdepau.com)FelipemeloAún no hay calificaciones
- Homología y Afinidad PDFDocumento12 páginasHomología y Afinidad PDFfasgafdgsfdgsfdgafdAún no hay calificaciones
- Tema 54Documento34 páginasTema 54Ricardo RodriguezAún no hay calificaciones
- Perpendicular Comun A Dos Rectas Que Se CruzanDocumento2 páginasPerpendicular Comun A Dos Rectas Que Se CruzanAlicia Tapia SanzAún no hay calificaciones
- Dibujo Técnico Septiembre PAU 2014 Castilla y León. ResueltoDocumento18 páginasDibujo Técnico Septiembre PAU 2014 Castilla y León. ResueltoArtista Multidisciplinar Ausín Sáinz100% (1)
- Tema7 GeometriaDocumento16 páginasTema7 GeometriaAdrian Hernandez Cambrano100% (1)
- 1.perspectiva CónicaDocumento20 páginas1.perspectiva CónicaAnonymous XTQabU100% (1)
- Homología AfinidadDocumento13 páginasHomología Afinidadpadulin_coloraoAún no hay calificaciones
- Verdadera Magnitud en La Representación. Ángulos: ObjetivosDocumento10 páginasVerdadera Magnitud en La Representación. Ángulos: ObjetivosJoaquín FernándezAún no hay calificaciones
- CircunferenciaDocumento8 páginasCircunferenciaByron RojasAún no hay calificaciones
- Ejercicios PARÁBOLASDocumento2 páginasEjercicios PARÁBOLASrocioares68Aún no hay calificaciones
- Inversión PDFDocumento23 páginasInversión PDFpadulin_colorao100% (1)
- Normalización y AcotaciónDocumento4 páginasNormalización y AcotaciónDianaBerbecíaAún no hay calificaciones
- Manual Ingenieria Grafica IIDocumento16 páginasManual Ingenieria Grafica IIpedromantillaAún no hay calificaciones
- Geometría Descriptiva ZahiraDocumento11 páginasGeometría Descriptiva ZahiraLeticia Reyes FlorentinoAún no hay calificaciones
- 5 - Paralelismo y Perpendicularidad Entre Rectas y PlanosDocumento9 páginas5 - Paralelismo y Perpendicularidad Entre Rectas y PlanosTaty De FlorezAún no hay calificaciones
- La potencia y sus aplicaciones geométricasDocumento18 páginasLa potencia y sus aplicaciones geométricasJosé Luis Mtz TrujilloAún no hay calificaciones
- Geometría descriptiva básicaDocumento40 páginasGeometría descriptiva básicaClaudia Tapia RojasAún no hay calificaciones
- Dibujo y Geometria para PackagingDocumento96 páginasDibujo y Geometria para PackagingLindsay AshleyAún no hay calificaciones
- Potencia, eje y centro radical: PECDocumento2 páginasPotencia, eje y centro radical: PECCesar Cruz RomeroAún no hay calificaciones
- Examen Selectividad Dibujo Técnico II de Castilla-La Mancha Convocatoria Extraordinaria de 2020Documento2 páginasExamen Selectividad Dibujo Técnico II de Castilla-La Mancha Convocatoria Extraordinaria de 2020ana salAún no hay calificaciones
- Paralelismo Perpendicularidad Laminas SoluDocumento6 páginasParalelismo Perpendicularidad Laminas SoluRoberto BenitezAún no hay calificaciones
- Examen Pau Dibujo Técnico Madrid 2002-03Documento8 páginasExamen Pau Dibujo Técnico Madrid 2002-03Jotace JuAún no hay calificaciones
- 1 NormalizaciónDocumento49 páginas1 NormalizacióncarlosmarulandaAún no hay calificaciones
- DiedricoDocumento45 páginasDiedricoTania Ibars SelmaAún no hay calificaciones
- Laminas Afinidad SolucionesDocumento0 páginasLaminas Afinidad SolucionesSuriñe SuriAún no hay calificaciones
- Cuadernillo 2º ESO Recuperación de EPVA PendienteDocumento34 páginasCuadernillo 2º ESO Recuperación de EPVA PendienteSabri DávalosAún no hay calificaciones
- TANGENCIASDocumento28 páginasTANGENCIASCarolina MasAún no hay calificaciones
- Intersecciones. Posiciones Relativas. Distancias: ObjetivosDocumento10 páginasIntersecciones. Posiciones Relativas. Distancias: ObjetivosJoaquín FernándezAún no hay calificaciones
- Dibujo Técnico PAU 2012 Junio. Castilla y León. Resuelto.Documento17 páginasDibujo Técnico PAU 2012 Junio. Castilla y León. Resuelto.Artista Multidisciplinar Ausín SáinzAún no hay calificaciones
- Ud1 PDFDocumento8 páginasUd1 PDFmacarena72Aún no hay calificaciones
- Apolonio CCPDocumento4 páginasApolonio CCPLuisina GutierrezAún no hay calificaciones
- Curvas CónicasDocumento6 páginasCurvas Cónicasrocioares68Aún no hay calificaciones
- TemarioDibujoOposicionesDocumento2 páginasTemarioDibujoOposicionesNAIOAún no hay calificaciones
- Circunferencias tangentesDocumento22 páginasCircunferencias tangentesolivaAún no hay calificaciones
- Cuaderno Diseño 2017-18Documento62 páginasCuaderno Diseño 2017-18Olimpia ManjonAún no hay calificaciones
- Apuntes Epva 4º Eso-Colegio Santa AnaDocumento86 páginasApuntes Epva 4º Eso-Colegio Santa AnamercedesAún no hay calificaciones
- Apuntes de Teoría PDFDocumento77 páginasApuntes de Teoría PDFjavier morenoAún no hay calificaciones
- Trazados básicos en el plano: ángulos, circunferencias y lugares geométricosDocumento8 páginasTrazados básicos en el plano: ángulos, circunferencias y lugares geométricosPablo FrancoAún no hay calificaciones
- Triangulos Conceptos ConstruccionesDocumento5 páginasTriangulos Conceptos ConstruccionesBeabel CastañoAún no hay calificaciones
- Examen Selectividad Madrid Dibujo TécnicoDocumento6 páginasExamen Selectividad Madrid Dibujo TécnicoMundoEstudiante.comAún no hay calificaciones
- Teoría, Arco Capaz y Cuadrilátero InscriptibleDocumento2 páginasTeoría, Arco Capaz y Cuadrilátero InscriptibleAnonymous unHFWYTFAún no hay calificaciones
- Integrales TriplesDocumento16 páginasIntegrales TriplesDARWIN CHAVEZAún no hay calificaciones
- Unidad #2-Guía #2-Integrales Dobles en Polares y AplicacionesDocumento21 páginasUnidad #2-Guía #2-Integrales Dobles en Polares y AplicacionesZlhunterGame -.-Aún no hay calificaciones
- 2 Integrales Mult Semana 8 BDocumento24 páginas2 Integrales Mult Semana 8 BFranklin Avilez SedanoAún no hay calificaciones
- Clase 13, PT 1. Integración Doble en Coordenadas PolaresDocumento6 páginasClase 13, PT 1. Integración Doble en Coordenadas PolaresJuanpablo bolañosAún no hay calificaciones
- Folleto 2 Olimpiada 2008Documento11 páginasFolleto 2 Olimpiada 2008Mariale SimpatuqueAún no hay calificaciones
- TécnicoDocumento640 páginasTécnicopadulin_colorao100% (2)
- PanamaDocumento48 páginasPanamapadulin_coloraoAún no hay calificaciones
- Apuntes Geometría Proyectiva FMG v2.2Documento57 páginasApuntes Geometría Proyectiva FMG v2.2padulin_colorao100% (1)
- PanamaDocumento48 páginasPanamapadulin_coloraoAún no hay calificaciones
- Ege 04 Geometria Descriptiva. Persistencia y CambioDocumento7 páginasEge 04 Geometria Descriptiva. Persistencia y Cambiopadulin_coloraoAún no hay calificaciones
- ElementosDocumento319 páginasElementospadulin_coloraoAún no hay calificaciones
- Lugares GeometricosDocumento177 páginasLugares GeometricoshermanniatsAún no hay calificaciones
- Normas Subsidiarias de Planeamiento de ArchenaDocumento90 páginasNormas Subsidiarias de Planeamiento de Archenapadulin_coloraoAún no hay calificaciones
- Inversión PDFDocumento23 páginasInversión PDFpadulin_colorao100% (1)
- Homología AfinidadDocumento13 páginasHomología Afinidadpadulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 10Documento1 páginaDibujo Técnico Apuntes (1) 10padulin_coloraoAún no hay calificaciones
- Inversión PDFDocumento23 páginasInversión PDFpadulin_colorao100% (1)
- ArcosDocumento480 páginasArcospadulin_coloraoAún no hay calificaciones
- Leon 2005Documento4 páginasLeon 2005padulin_coloraoAún no hay calificaciones
- Elementos de geometríaDocumento319 páginasElementos de geometríamamanisaavedraAún no hay calificaciones
- 1oeso Geometria PlanaDocumento7 páginas1oeso Geometria Planapadulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 11Documento1 páginaDibujo Técnico Apuntes (1) 11padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 13Documento1 páginaDibujo Técnico Apuntes (1) 13padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 14Documento1 páginaDibujo Técnico Apuntes (1) 14padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 6Documento1 páginaDibujo Técnico Apuntes (1) 6padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 8Documento1 páginaDibujo Técnico Apuntes (1) 8padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 12Documento1 páginaDibujo Técnico Apuntes (1) 12padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 15Documento1 páginaDibujo Técnico Apuntes (1) 15padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 7Documento1 páginaDibujo Técnico Apuntes (1) 7padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 5Documento1 páginaDibujo Técnico Apuntes (1) 5padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 4Documento1 páginaDibujo Técnico Apuntes (1) 4padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 3Documento1 páginaDibujo Técnico Apuntes (1) 3padulin_coloraoAún no hay calificaciones
- Dibujo Técnico Apuntes (1) 6 PDFDocumento1 páginaDibujo Técnico Apuntes (1) 6 PDFpadulin_coloraoAún no hay calificaciones
- El Nacimiento de Una Nueva HumanidadDocumento10 páginasEl Nacimiento de Una Nueva HumanidadFelix Danilo SanchezAún no hay calificaciones
- Lectura 2 Italo PizzolanteDocumento24 páginasLectura 2 Italo PizzolanteambiixDAún no hay calificaciones
- Especificaciones TecnicasDocumento98 páginasEspecificaciones TecnicasLeydi Laura VigabrielAún no hay calificaciones
- El Universo Sería Una Suma de Historias PosiblesDocumento6 páginasEl Universo Sería Una Suma de Historias PosiblessolanitosolanitoAún no hay calificaciones
- Curso Visio Profesional 2007Documento26 páginasCurso Visio Profesional 2007hugobauAún no hay calificaciones
- Proyecto de Vida Reflexiones EscritasDocumento4 páginasProyecto de Vida Reflexiones EscritasMaicol ZambranoAún no hay calificaciones
- Potencia Fluida: Dr. Mario Alberto Bello GómezDocumento29 páginasPotencia Fluida: Dr. Mario Alberto Bello GómezIsaias Jaaziel MartinezAún no hay calificaciones
- Estratificacion y Movilidad SocialDocumento35 páginasEstratificacion y Movilidad SocialJesica Lorena PlaAún no hay calificaciones
- El Concepto de Estilos de DesarrolloDocumento20 páginasEl Concepto de Estilos de DesarrolloRoberto LandaAún no hay calificaciones
- Fractal EsDocumento19 páginasFractal EsJason AlbarracinAún no hay calificaciones
- Resumen - El Cuarto Entorno: Conciencia, Hiperespacio y TelepatíaDocumento13 páginasResumen - El Cuarto Entorno: Conciencia, Hiperespacio y TelepatíaLuciano Méndez100% (2)
- Sobre La Tierra No Hay Medida de Salvador Gallardo CabreraDocumento172 páginasSobre La Tierra No Hay Medida de Salvador Gallardo Cabreramitgar100% (1)
- Mapa Mental 1 C2Documento13 páginasMapa Mental 1 C2grggAún no hay calificaciones
- Analisis Dimensional IiDocumento2 páginasAnalisis Dimensional IiDanny BlancoAún no hay calificaciones
- Unidad 1Documento9 páginasUnidad 1María Tereza Navarro SánchezAún no hay calificaciones
- Conociendo El Wallontu MapuDocumento6 páginasConociendo El Wallontu Mapullanqui911Aún no hay calificaciones
- Antropologia Social Antropologia Social Baldwin Muench ReyesDocumento172 páginasAntropologia Social Antropologia Social Baldwin Muench ReyesJorge Ricardo Gámez ElizondoAún no hay calificaciones
- Competencias Del Trabajo en EquipoDocumento17 páginasCompetencias Del Trabajo en EquipoYesseniaAriadelSamaniegoAún no hay calificaciones
- Ejercicios de Física General sobre Movimiento y CinemáticaDocumento30 páginasEjercicios de Física General sobre Movimiento y CinemáticaDavid AlvarezAún no hay calificaciones
- Tipos de Planos Simbologia y SeñalizacionDocumento48 páginasTipos de Planos Simbologia y Señalizacionismamr50% (2)
- Sistemas de Unidades TALLER PAGINA 136 2021Documento8 páginasSistemas de Unidades TALLER PAGINA 136 2021Fabian Yesid Quemba AguilarAún no hay calificaciones
- Nom 012 Scfi 1994Documento14 páginasNom 012 Scfi 1994Osvaldo Ramirez100% (1)
- Biodanza y FibromialgiaDocumento5 páginasBiodanza y Fibromialgiaandreaolivamera100% (1)
- Dibujo TécnicoDocumento63 páginasDibujo Técnicodiana8janeth8gradizAún no hay calificaciones
- Mef - Metas Fisicas 2020-OkDocumento34 páginasMef - Metas Fisicas 2020-OkWalter VillegasAún no hay calificaciones
- GEOMETRIA JoseDocumento15 páginasGEOMETRIA JoseOmar ChecallaAún no hay calificaciones
- Capitulo VIIDocumento20 páginasCapitulo VIIJoseph Otaku NaruanimangaAún no hay calificaciones
- Analisis Dimensional PDFDocumento9 páginasAnalisis Dimensional PDFJorgeTaipeAún no hay calificaciones
- La Teoria Del CaosDocumento9 páginasLa Teoria Del CaosChristian Gabriel Stampacchio100% (24)