También podría gustarte
- Formato Plan de IzajeDocumento4 páginasFormato Plan de IzajePaulo Cesar100% (1)
- La primavera de la inteligencia artificial: Imaginación, creatividad y lenguaje en una nueva era tecnológicaDe EverandLa primavera de la inteligencia artificial: Imaginación, creatividad y lenguaje en una nueva era tecnológicaAún no hay calificaciones
- Proyecto Tic AulaDocumento19 páginasProyecto Tic Aulacheindio50% (2)
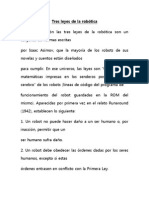
- Tres Leyes de La RobóticaDocumento3 páginasTres Leyes de La RobóticaHernan BiondiniAún no hay calificaciones
- Teoria Del Cambio Cultural-Julian H. StewardDocumento18 páginasTeoria Del Cambio Cultural-Julian H. StewardLeónBolom100% (6)
- Las Tres Leyes de La RobóticaDocumento1 páginaLas Tres Leyes de La RobóticaShirley Susana100% (1)
- Resumen de La LeyDocumento16 páginasResumen de La LeyNoa Piñeiro LópezAún no hay calificaciones
- Robotica 3.1 y 3.2 MamalonaDocumento34 páginasRobotica 3.1 y 3.2 MamalonaCesar OmarAún no hay calificaciones
- Las Leyes de La RoboticaDocumento3 páginasLas Leyes de La Roboticaboricua_calenaAún no hay calificaciones
- Inteligencia ArtificialDocumento23 páginasInteligencia ArtificialAlanna Carrillo justinianoAún no hay calificaciones
- Fallas y Soluciones Comentadas de Fuentes de PC AtxDocumento6 páginasFallas y Soluciones Comentadas de Fuentes de PC AtxJoseph Hernandez100% (1)
- 1 ErtarearoboticaDocumento7 páginas1 Ertarearoboticajonathan castilloAún no hay calificaciones
- Tres Leyes de La RobóticaDocumento4 páginasTres Leyes de La RobóticaLuis AlbertoAún no hay calificaciones
- Tres Leyes de La RobóticaDocumento5 páginasTres Leyes de La RobóticaElejalde Ortega HuarangaAún no hay calificaciones
- Las Leyes de La RobóticaDocumento4 páginasLas Leyes de La RobóticaAlberto TorresAún no hay calificaciones
- Monografia de RoboticaDocumento23 páginasMonografia de RoboticaXavi H PQAún no hay calificaciones
- Equipo 3 - EV1 - IARDocumento7 páginasEquipo 3 - EV1 - IARHarold ValderramaAún no hay calificaciones
- Informe Carro Robótico ESPOCHDocumento21 páginasInforme Carro Robótico ESPOCHBryan Marcelo Criollo IzaAún no hay calificaciones
- Robótica - MonografiasDocumento26 páginasRobótica - MonografiasChristopher RoblesAún no hay calificaciones
- Robótica. Robots, Autómatas y Máquinas SimplesDocumento29 páginasRobótica. Robots, Autómatas y Máquinas SimplesMasMatesAún no hay calificaciones
- 111Documento23 páginas111Albert VelásquezAún no hay calificaciones
- RoboticaDocumento2 páginasRoboticaLuz AndreaAún no hay calificaciones
- Las Leyes de AzimovDocumento1 páginaLas Leyes de AzimovDarien GarciaAún no hay calificaciones
- Leyes de La Robotica XDXDDocumento4 páginasLeyes de La Robotica XDXDMiguel WacIntóshAún no hay calificaciones
- Tres Leyes de La RobóticaDocumento6 páginasTres Leyes de La RobóticaGabriel FloresAún no hay calificaciones
- Ensayo Pelicula Yo RobotDocumento2 páginasEnsayo Pelicula Yo RobotAngel VazquezAún no hay calificaciones
- Leyes de La Robotica y SensoresDocumento6 páginasLeyes de La Robotica y SensoresVladimir VásquezAún no hay calificaciones
- Primer Robot de La HistoriaDocumento6 páginasPrimer Robot de La HistoriaEdwin OvandoAún no hay calificaciones
- Documento Sin TítuloDocumento2 páginasDocumento Sin Títuloantony schneyder ordoñez ortizAún no hay calificaciones
- Document 1701739949639618821Documento1 páginaDocument 17017399496396188219whpc9jwvxAún no hay calificaciones
- Cual Es La Ley Que Los Robots No Pueden RomperDocumento4 páginasCual Es La Ley Que Los Robots No Pueden RomperDaniel LopezAún no hay calificaciones
- Robot, Cyborg y Androide, Qué Son y Cuáles Son Sus DiferenciasDocumento4 páginasRobot, Cyborg y Androide, Qué Son y Cuáles Son Sus Diferenciasluis fernando davalos castroAún no hay calificaciones
- Examen de DinamicaDocumento64 páginasExamen de DinamicaDaniel Flores ReyesAún no hay calificaciones
- Leyes de La RoboticaDocumento3 páginasLeyes de La RoboticaJORGE ALEJANDRO RAMIREZ AQUINOAún no hay calificaciones
- Evolucion de La RoboticaDocumento7 páginasEvolucion de La RoboticaCinthya JiménezAún no hay calificaciones
- Cta Comprension Lectora RoboticaDocumento1 páginaCta Comprension Lectora RoboticaEdwin BolivarAún no hay calificaciones
- Que Es La RoboticaDocumento6 páginasQue Es La RoboticaJose Ruiloba100% (2)
- Automatizando El FuturoDocumento2 páginasAutomatizando El Futurolaura santosAún no hay calificaciones
- Leyes de La RoboticaDocumento2 páginasLeyes de La RoboticaJoseAntonioGuerreroChavezAún no hay calificaciones
- ROBOTICADocumento6 páginasROBOTICAvillazante.12959126Aún no hay calificaciones
- Taller RobóticaDocumento4 páginasTaller RobóticaJohn AlexanderAún no hay calificaciones
- Guia Tecnología 10mo 4 Automatismos y Robotica PDFDocumento5 páginasGuia Tecnología 10mo 4 Automatismos y Robotica PDFJAROL GALVISAún no hay calificaciones
- La Historia de La Robótica Va Unida A La Construcción deDocumento1 páginaLa Historia de La Robótica Va Unida A La Construcción deJuan RodríguezAún no hay calificaciones
- Act.4 c2 Maloaipa Robot 602Documento14 páginasAct.4 c2 Maloaipa Robot 602Aixa Paola martínez LópezAún no hay calificaciones
- Robotica y SociedadDocumento2 páginasRobotica y SociedadyenishinAún no hay calificaciones
- Robotic ADocumento3 páginasRobotic Afernando garciaAún no hay calificaciones
- UNIDAD 2 - Clase III - 24-04-2021Documento28 páginasUNIDAD 2 - Clase III - 24-04-2021DISEÑOS EDUCATIVOS VIRTUALES Karina SarroAún no hay calificaciones
- Taller Leyes de La RobóticaDocumento4 páginasTaller Leyes de La RobóticaAmori Corvalán0% (1)
- La Ciencia Que No Tenía NombreDocumento2 páginasLa Ciencia Que No Tenía NombrePablo Zamora MercadoAún no hay calificaciones
- RoboticaDocumento22 páginasRoboticaOliver Vasquez100% (1)
- Cuestionario 1Documento5 páginasCuestionario 1Emma SantanaAún no hay calificaciones
- Qué Es La RobóticaDocumento9 páginasQué Es La RobóticaquentaticonabrigidaAún no hay calificaciones
- RobóticaDocumento12 páginasRobóticagrandevilledaAún no hay calificaciones
- EnsayoDocumento8 páginasEnsayoManuel BarriosAún no hay calificaciones
- La Humanizacion de Los Circuitos Juan Alejandro Bedoya TabordaDocumento2 páginasLa Humanizacion de Los Circuitos Juan Alejandro Bedoya TabordaJhésika AlzateAún no hay calificaciones
- Póster Robots Técnicos Vs Robots Ideales.Documento1 páginaPóster Robots Técnicos Vs Robots Ideales.Guillermo ShîrøxxAún no hay calificaciones
- Yo RobotDocumento6 páginasYo Robotapi-283932593Aún no hay calificaciones
- Taller NovenoDocumento3 páginasTaller Novenocristhian andres caicedoAún no hay calificaciones
- Cuestionario RobóticaDocumento5 páginasCuestionario RobóticakimberlyariagnasantanaAún no hay calificaciones
- Postulados Roboticos IDocumento5 páginasPostulados Roboticos IRafaelGarcíaCepasAún no hay calificaciones
- Cta Comprension Lectora Robotica PDFDocumento1 páginaCta Comprension Lectora Robotica PDFDayana UtrillaAún no hay calificaciones
- Robotic ADocumento10 páginasRobotic AInovation Of The PearAún no hay calificaciones
- Etica de RobotsDocumento9 páginasEtica de RobotsapiocrudoAún no hay calificaciones
- Nanotecnología y RobóticaDocumento4 páginasNanotecnología y RobóticaRebeca Hernández SotoAún no hay calificaciones
- Tarea Robotica DerekDocumento2 páginasTarea Robotica DerekEfectoGanando EfectoGanandoAún no hay calificaciones
- Evolucion de Las Aplicaciones Web (Ensayo)Documento6 páginasEvolucion de Las Aplicaciones Web (Ensayo)william rojasAún no hay calificaciones
- Aplicaciones Web, Su Evolución, Arquitectura y PlanificaciónDocumento10 páginasAplicaciones Web, Su Evolución, Arquitectura y Planificaciónwilliam rojasAún no hay calificaciones
- Frameworks para La Construcción de Aplicaciones WebDocumento5 páginasFrameworks para La Construcción de Aplicaciones Webwilliam rojasAún no hay calificaciones
- Evolucion de Las Aplicaciones Web (Cuadro Sinoptico)Documento2 páginasEvolucion de Las Aplicaciones Web (Cuadro Sinoptico)william rojasAún no hay calificaciones
- Plan de Calidad de SoftwareDocumento5 páginasPlan de Calidad de Softwarewilliam rojasAún no hay calificaciones
- Evolucion de Las Aplicaciones WebDocumento12 páginasEvolucion de Las Aplicaciones Webwilliam rojasAún no hay calificaciones
- Aplicaciones Web, Su Evolución, Arquitectura y PlanificaciónDocumento10 páginasAplicaciones Web, Su Evolución, Arquitectura y Planificaciónwilliam rojasAún no hay calificaciones
- U2 P1 Programacion BasicaDocumento21 páginasU2 P1 Programacion Basicawilliam rojas100% (1)
- Diseño Logico de La RedDocumento4 páginasDiseño Logico de La Redwilliam rojasAún no hay calificaciones
- Requerimientos de My SQLDocumento3 páginasRequerimientos de My SQLwilliam rojasAún no hay calificaciones
- Instrucciones EMU 8086Documento6 páginasInstrucciones EMU 8086william rojasAún no hay calificaciones
- 4.4. Niveles de AislamientoDocumento9 páginas4.4. Niveles de Aislamientowilliam rojasAún no hay calificaciones
- CONCLUSION Noree MetroDocumento9 páginasCONCLUSION Noree MetroDamiem MoroAún no hay calificaciones
- OTC2 Centrifuga Separadora para El Tratamiento de Liquidos A Base de Aceite ESDocumento4 páginasOTC2 Centrifuga Separadora para El Tratamiento de Liquidos A Base de Aceite ESCarlosAún no hay calificaciones
- Guia Python 2015 - Soto, ArriagadaDocumento66 páginasGuia Python 2015 - Soto, ArriagadaVALENTINA CARVAJALAún no hay calificaciones
- Amplificadores OperacionalesDocumento22 páginasAmplificadores OperacionalesDaniela BurgosAún no hay calificaciones
- Practica No 3 EMGDocumento4 páginasPractica No 3 EMGKeyner RoblesAún no hay calificaciones
- Manejo Desecho SolidosDocumento12 páginasManejo Desecho Solidosmaria haydeAún no hay calificaciones
- Capacitacion Señalización VialDocumento21 páginasCapacitacion Señalización VialLuis Carlos Gutierrez Pedraza100% (1)
- Instalación de Un Servidor Xampp en Una Maquina Virtual LinuxDocumento9 páginasInstalación de Un Servidor Xampp en Una Maquina Virtual LinuxSoniaFernandezSapenaAún no hay calificaciones
- Diagrama Multiproducto, Origen-Destino y de HilosDocumento8 páginasDiagrama Multiproducto, Origen-Destino y de HilosAlbert Alonso Traña SantanaAún no hay calificaciones
- Desafío 5Documento6 páginasDesafío 5Amanda Santis CAún no hay calificaciones
- Programacion ArduinoDocumento6 páginasProgramacion ArduinoLeo CarreraAún no hay calificaciones
- Fuente de Alimentacion PC 200W AtxDocumento3 páginasFuente de Alimentacion PC 200W AtxAlejandro MaldonadoAún no hay calificaciones
- Guia Examenes Online That's EnglishDocumento10 páginasGuia Examenes Online That's EnglishNatalia MartínAún no hay calificaciones
- DIAPOSITIVAS Análisis Sísmico Método de DesplazamientosDocumento34 páginasDIAPOSITIVAS Análisis Sísmico Método de DesplazamientosJonathan MoreiraAún no hay calificaciones
- Explicación Ejercicio 2 CalcDocumento4 páginasExplicación Ejercicio 2 CalcdavcasbraAún no hay calificaciones
- Micro Curriculo Dibujo de IngenieriaDocumento5 páginasMicro Curriculo Dibujo de IngenieriaKatty GonzalezAún no hay calificaciones
- Transfer Maker Manual CHA-27Documento25 páginasTransfer Maker Manual CHA-27Ivan SaladinoAún no hay calificaciones
- Practica de Ofimatica E.Documento11 páginasPractica de Ofimatica E.Michel SuitAún no hay calificaciones
- Clase 1 Estudio Del TrabajoDocumento37 páginasClase 1 Estudio Del Trabajodulce martinez almendarizAún no hay calificaciones
- TESIS EDUCACIÓN Polya P 120 PDFDocumento142 páginasTESIS EDUCACIÓN Polya P 120 PDFRolando Cuellar TelloAún no hay calificaciones
- Conalux Led Tarifa 10 2022 Baja 1Documento444 páginasConalux Led Tarifa 10 2022 Baja 1Antonio Vergara RuizAún no hay calificaciones
- Pei Nazario RestrepoesperanzaDocumento176 páginasPei Nazario RestrepoesperanzaPastoral Preescolar San Luis - ManizalesAún no hay calificaciones
- Xdoc - MX Omega Un Sistema Mejorado de Texaco para La Mezcla de GasolinaDocumento10 páginasXdoc - MX Omega Un Sistema Mejorado de Texaco para La Mezcla de GasolinaLitman RSAún no hay calificaciones
- TelepatologiaDocumento4 páginasTelepatologiaEddy HuarachaAún no hay calificaciones
- Catálogo Panamá Versión AzulDocumento18 páginasCatálogo Panamá Versión AzulAnonymous el3M20y13qAún no hay calificaciones