También podría gustarte
- 2.1.6 Vibracion - Trabajo en EquipoDocumento20 páginas2.1.6 Vibracion - Trabajo en EquipoAzael RoldanAún no hay calificaciones
- 2.1.1 IluminacionDocumento24 páginas2.1.1 IluminacionAzael RoldanAún no hay calificaciones
- 1 Balanceo de LineasDocumento7 páginas1 Balanceo de LineasAzael RoldanAún no hay calificaciones
- 2.2.2 Principios de Ergonomia OcupacionalDocumento31 páginas2.2.2 Principios de Ergonomia OcupacionalAzael RoldanAún no hay calificaciones
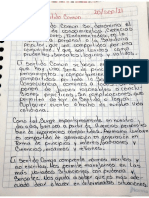
- Sentido ComunDocumento2 páginasSentido ComunAzael RoldanAún no hay calificaciones
- 3.4 BiomecánicaDocumento33 páginas3.4 BiomecánicaAzael RoldanAún no hay calificaciones
- Conceptos y Clasificación de Tableros. Conceptos y Clasificación de Tableros.Documento12 páginasConceptos y Clasificación de Tableros. Conceptos y Clasificación de Tableros.Azael RoldanAún no hay calificaciones
- AMEF Pasos 1 y 5Documento4 páginasAMEF Pasos 1 y 5Azael RoldanAún no hay calificaciones
- Ingeniería IndustrialDocumento33 páginasIngeniería IndustrialAzael RoldanAún no hay calificaciones
- 1 Balanceo de LineasDocumento7 páginas1 Balanceo de LineasAzael RoldanAún no hay calificaciones
- 1 LP AMEF v2Documento5 páginas1 LP AMEF v2Azael RoldanAún no hay calificaciones
- Ejercicios OEEDocumento4 páginasEjercicios OEEAzael Roldan100% (1)
- 2020-2021 Plan de Trabajo 1° Regreso A Clases A DistanciaDocumento2 páginas2020-2021 Plan de Trabajo 1° Regreso A Clases A DistanciaAzael RoldanAún no hay calificaciones
- Ejercicios Cap 8Documento20 páginasEjercicios Cap 8Azael RoldanAún no hay calificaciones
- Cartas de Control para Atributos Ejercicios 5 y 20Documento5 páginasCartas de Control para Atributos Ejercicios 5 y 20Azael RoldanAún no hay calificaciones
- AMEF de Diseño SecadoraDocumento14 páginasAMEF de Diseño SecadoraAzael RoldanAún no hay calificaciones
- Capitulo 7 y 8Documento19 páginasCapitulo 7 y 8Azael RoldanAún no hay calificaciones
- Aplicacion de PLCDocumento17 páginasAplicacion de PLCAzael RoldanAún no hay calificaciones
- Presupuesto-Papas EjemploDocumento35 páginasPresupuesto-Papas EjemploAzael RoldanAún no hay calificaciones
- Practica 5Documento10 páginasPractica 5Azael RoldanAún no hay calificaciones
- Fichas BobliograficasDocumento8 páginasFichas BobliograficasAzael RoldanAún no hay calificaciones
- Tarea de TrgonometriaDocumento12 páginasTarea de TrgonometriaAzael RoldanAún no hay calificaciones
- El Lider SintetizadorDocumento6 páginasEl Lider SintetizadorHerber RamosAún no hay calificaciones
- Palabras de Samuel SmilesDocumento2 páginasPalabras de Samuel SmilesAntonio GnzAún no hay calificaciones
- Ce 2720Documento6 páginasCe 2720Euro José Alfaro LópezAún no hay calificaciones
- Reseña Sistemas de Gestion de Calidad Teoria y Practica Bajo La Norma Iso Capitulo 2Documento2 páginasReseña Sistemas de Gestion de Calidad Teoria y Practica Bajo La Norma Iso Capitulo 2Sebastian Alexis Bolivar TiqueAún no hay calificaciones
- En 14730Documento56 páginasEn 14730Sindley Limache100% (1)
- Guia Rapida AutoclaveDocumento1 páginaGuia Rapida Autoclaveleonard perezAún no hay calificaciones
- Teoría de ThomsonDocumento4 páginasTeoría de ThomsonMarcko's SalazarAún no hay calificaciones
- Practica Third Work Guide Third Term Seventh GradeDocumento6 páginasPractica Third Work Guide Third Term Seventh Gradeduvan marinAún no hay calificaciones
- Rúbrica Presentación en SalaDocumento1 páginaRúbrica Presentación en SalaMadeleine GallardoAún no hay calificaciones
- Proyecto de Banca JuvenilDocumento3 páginasProyecto de Banca JuvenilLeonardo Gutierrez.Aún no hay calificaciones
- Formato CV EjecutivoDocumento2 páginasFormato CV Ejecutivomartin quintanaAún no hay calificaciones
- Taller Residuos SólidosDocumento2 páginasTaller Residuos SólidosKaren PereiraAún no hay calificaciones
- Politica Gestion DatosDocumento38 páginasPolitica Gestion DatosSaraAún no hay calificaciones
- Anthony, Piers - Desafio Total (1989)Documento174 páginasAnthony, Piers - Desafio Total (1989)kafkakafkaseñorKAún no hay calificaciones
- Brochure Pronte Infraestructura-2Documento9 páginasBrochure Pronte Infraestructura-2juan chavezAún no hay calificaciones
- Boletines de PrekinderDocumento7 páginasBoletines de PrekinderBeltran Herrera Osneider De JesúsAún no hay calificaciones
- Actividades de Financiamiento TombolaDocumento8 páginasActividades de Financiamiento TombolaJaquelyn Mantari EscobarAún no hay calificaciones
- Protocolo 20210311Documento79 páginasProtocolo 20210311Ivan FonsecaAún no hay calificaciones
- NOSOLOGIA Lec. 1Documento9 páginasNOSOLOGIA Lec. 1Kathya AmadorAún no hay calificaciones
- 6 Practica 5 SalchichaDocumento5 páginas6 Practica 5 SalchichaMario Luna ContrerasAún no hay calificaciones
- Cotización Fotografia y Creacion ProductoDocumento3 páginasCotización Fotografia y Creacion ProductoVictor LeonAún no hay calificaciones
- DepietriDocumento6 páginasDepietriLeonel De RubaAún no hay calificaciones
- Monocito Maduracion PDFDocumento3 páginasMonocito Maduracion PDFTB MiguelAún no hay calificaciones
- Qué Es El Diseño InstruccionalDocumento10 páginasQué Es El Diseño InstruccionalEdwin PiratovaAún no hay calificaciones
- Explicación de C++Documento41 páginasExplicación de C++Michael BeltranAún no hay calificaciones
- 01 Liderando Una Cultura de KaizenDocumento3 páginas01 Liderando Una Cultura de KaizenGermanRobertoFongAún no hay calificaciones
- Actas de Induccion Al Talento HumanoDocumento68 páginasActas de Induccion Al Talento HumanoYurany Vasquez SidrayAún no hay calificaciones
- La Evaluación de Impactos Ambientales (EIA) y Un Modelo de Desarrollo LocalDocumento11 páginasLa Evaluación de Impactos Ambientales (EIA) y Un Modelo de Desarrollo LocalErnesto G. Pirillo100% (1)
- Informe Situacional de Almacen de Obra 2023Documento2 páginasInforme Situacional de Almacen de Obra 2023Varinia Mamani Palomino100% (1)
- Reconciliarse Con La Energia FemeninaDocumento10 páginasReconciliarse Con La Energia Femeninamamapacha pacha100% (3)