También podría gustarte
- HT 9.2 - Convección Forzada InternaDocumento1 páginaHT 9.2 - Convección Forzada InternaDiegoChonilloAún no hay calificaciones
- Practica de Eficiencia Del CompresorDocumento11 páginasPractica de Eficiencia Del CompresorIvan Gonzalez LaraAún no hay calificaciones
- Practica TermoDocumento3 páginasPractica TermoNelson VinoAún no hay calificaciones
- Ejercicio 7-18 - GRUPO 6Documento7 páginasEjercicio 7-18 - GRUPO 6ANDRES ANTHONY ACOSTA ALVITRESAún no hay calificaciones
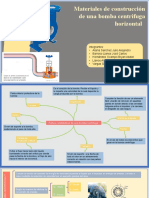
- Materialesde Construccion de Algunas Partes de Bomba Centrifuga HorizontalDocumento6 páginasMaterialesde Construccion de Algunas Partes de Bomba Centrifuga HorizontalAlejandro Vargas GonzalezAún no hay calificaciones
- Diseño de levas para movimiento de seguidoresDocumento2 páginasDiseño de levas para movimiento de seguidoresCuauhtemoc Mazon ValadezAún no hay calificaciones
- Infografia Actuadores-Neumatica U2Documento1 páginaInfografia Actuadores-Neumatica U2Cheyo Angulo ManriqueAún no hay calificaciones
- Diseño de Levas 2Documento22 páginasDiseño de Levas 2Jesmil Antonio Dimas ZeñaAún no hay calificaciones
- Ejercicios ShigleyDocumento15 páginasEjercicios ShigleyJose SalasAún no hay calificaciones
- Tarea 1 Dinámica O-M 2019-2020Documento4 páginasTarea 1 Dinámica O-M 2019-2020HolaSoyJhanferSotomayorAún no hay calificaciones
- Formulario de TornillosDocumento10 páginasFormulario de TornillosMijhael FernandezAún no hay calificaciones
- Dinamica Sacudimiento VolanteDocumento30 páginasDinamica Sacudimiento VolanteAndres Vega FerreroAún no hay calificaciones
- Problemas ResueltosDocumento21 páginasProblemas ResueltosNoe Minga CalderonAún no hay calificaciones
- Barra de Sección CónicaDocumento20 páginasBarra de Sección CónicaBoris PumisachoAún no hay calificaciones
- En La FiguraDocumento5 páginasEn La FiguraJesús Perez67% (3)
- Bandas y PoleasDocumento3 páginasBandas y PoleasGerardo Abraham BarrazaAún no hay calificaciones
- Vibraciones mecánicas ejerciciosDocumento3 páginasVibraciones mecánicas ejerciciosUlises OrnelasAún no hay calificaciones
- Capitulo 3 ATN 603Documento23 páginasCapitulo 3 ATN 603Callisaya Marca CristianAún no hay calificaciones
- Ejercicios Segunda Evaluación Diseño de elementos de máquinas 1Documento2 páginasEjercicios Segunda Evaluación Diseño de elementos de máquinas 1Emmanuel AlvarezAún no hay calificaciones
- Introduccion A La Proyección de MecanismosDocumento20 páginasIntroduccion A La Proyección de MecanismosErick PalomoAún no hay calificaciones
- Deber MecanDocumento3 páginasDeber MecanMarcos OrtizAún no hay calificaciones
- Diseño de Elementos de Máquinas A 2° ParcialDocumento5 páginasDiseño de Elementos de Máquinas A 2° ParcialAlberto RsAún no hay calificaciones
- Ejercicios Remaches y TornillosDocumento5 páginasEjercicios Remaches y TornillosbeatrizcanquicruzAún no hay calificaciones
- Fuerzas ejercidas por un engranaje en un ejeDocumento9 páginasFuerzas ejercidas por un engranaje en un ejeAna Karina CupeiroAún no hay calificaciones
- Método de Resolución y DescomposiciónDocumento23 páginasMétodo de Resolución y DescomposiciónPablo TrejoAún no hay calificaciones
- Desbalance RotatorioDocumento8 páginasDesbalance RotatorioManuel Rivas100% (3)
- Concentración de Esfuerzos en Ejes CircularesDocumento8 páginasConcentración de Esfuerzos en Ejes CircularesWilsonAlbertoZumba100% (1)
- Eje secundario poleas banda V tensiones fuerzas reacción esfuerzosDocumento6 páginasEje secundario poleas banda V tensiones fuerzas reacción esfuerzosROnaldo' Mg0% (1)
- Tarea Alumno 1Documento3 páginasTarea Alumno 1JhoOn Luna JaenAún no hay calificaciones
- Esfuerzos FluctuantesDocumento23 páginasEsfuerzos Fluctuantesfernando_puente_150% (1)
- Taller1unidad1parcial1 DiseñoDocumento5 páginasTaller1unidad1parcial1 DiseñoJuan Lomas12Aún no hay calificaciones
- Diagrama de BloquesDocumento5 páginasDiagrama de BloquesAlejandra Alarcon SuarezAún no hay calificaciones
- Ejercicio Freno de Mano Tipo BloqueDocumento7 páginasEjercicio Freno de Mano Tipo BloqueRonald SvAún no hay calificaciones
- Ejercicios de Diseño de Elementos de MaquinasDocumento8 páginasEjercicios de Diseño de Elementos de Maquinasmilcon elme sivana100% (1)
- Problemas RodamientosDocumento8 páginasProblemas RodamientosLeonardo Marin AlccaccahuaAún no hay calificaciones
- UNIDAD - II Teoria de Criterio de Fallas Por Carga EstaticaDocumento15 páginasUNIDAD - II Teoria de Criterio de Fallas Por Carga EstaticaArquimedes Storm91% (11)
- Pregunta ExamenDocumento9 páginasPregunta ExamenAmilcar RuizAún no hay calificaciones
- Ejercicio11 2Documento5 páginasEjercicio11 2David SernaAún no hay calificaciones
- Vibración Armónica ExcitadaDocumento60 páginasVibración Armónica ExcitadaEstefania Pallo50% (2)
- Conexión cilindro presión pernos factorDocumento1 páginaConexión cilindro presión pernos factorAgustín RemacheAún no hay calificaciones
- Esfuerzo Cortante Màximo Ejercicio ResueltoDocumento2 páginasEsfuerzo Cortante Màximo Ejercicio ResueltoDiegoTuarezAún no hay calificaciones
- Vibracion Forzada Amortiguada - AplicacionesDocumento9 páginasVibracion Forzada Amortiguada - AplicacionesJosé AlvaroAún no hay calificaciones
- RESORTEDocumento15 páginasRESORTEMarkelys Vargas100% (1)
- Trabajo 5 Tren de Engrane RevertidoDocumento71 páginasTrabajo 5 Tren de Engrane RevertidoAlex AlmacheAún no hay calificaciones
- 27Documento2 páginas27Misael AguilaAún no hay calificaciones
- Aplicación de Mecanismos de Manivela - Corredera InvertidaDocumento4 páginasAplicación de Mecanismos de Manivela - Corredera InvertidaYisaac HerreraAún no hay calificaciones
- Vibra Excitacion de Base 2019-1Documento15 páginasVibra Excitacion de Base 2019-1R S Castro ChumpitazAún no hay calificaciones
- Ensayo Pandeo Resis 2Documento11 páginasEnsayo Pandeo Resis 2Lucas Andres Yanac DurandAún no hay calificaciones
- Problema Fatiga - ResueltoDocumento6 páginasProblema Fatiga - ResueltoAldairCedilloAún no hay calificaciones
- Diseño de Máquinas CAPITULO 12 SOLDADURADocumento32 páginasDiseño de Máquinas CAPITULO 12 SOLDADURAMauricio CarrascoAún no hay calificaciones
- Estudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Documento13 páginasEstudio de Las Vibraciones y Aplicaciones en Diversos Medios 11Alfredo Alejandro Valenzuela100% (1)
- Ejercicio11 3Documento6 páginasEjercicio11 3David SernaAún no hay calificaciones
- Mapa MentalDocumento1 páginaMapa Mentalsistemaelectrico0% (1)
- Módulo de elasticidad, deformación y tensiones en materialesDocumento2 páginasMódulo de elasticidad, deformación y tensiones en materialesStalin Arias0% (1)
- Práctica 2Documento6 páginasPráctica 2Jorge EspinosaAún no hay calificaciones
- Problema 11Documento4 páginasProblema 11Anonymous JgqkOTkpi0% (1)
- unidad 2 Ejes de transmisiónDocumento22 páginasunidad 2 Ejes de transmisiónSebastian RomanAún no hay calificaciones
- Guía sobre diseño y cálculo de ejesDocumento5 páginasGuía sobre diseño y cálculo de ejesHector AguilarAún no hay calificaciones
- Diseño de EjesDocumento10 páginasDiseño de EjesRoberto SantiagoAún no hay calificaciones
- Ejes HuecosDocumento11 páginasEjes HuecosMisael Mendieta0% (2)
- Ensayo Acerca Del Ciclo de CarnotDocumento5 páginasEnsayo Acerca Del Ciclo de Carnotdali mojicaAún no hay calificaciones
- Eval Intermedia Residencia ProfesionalDocumento2 páginasEval Intermedia Residencia Profesionaldali mojicaAún no hay calificaciones
- Seguimiento de Residencia ProfesionalDocumento2 páginasSeguimiento de Residencia Profesionaldali mojicaAún no hay calificaciones
- Carta de AceptacionDocumento1 páginaCarta de Aceptaciondali mojicaAún no hay calificaciones
- Regeneración de gas SF6 en subestaciones encapsuladas 230 kVDocumento2 páginasRegeneración de gas SF6 en subestaciones encapsuladas 230 kVdali mojicaAún no hay calificaciones
- Sistemas auxiliares motoresDocumento15 páginasSistemas auxiliares motoresdali mojicaAún no hay calificaciones
- Ajustes Relevador de DistanciaDocumento7 páginasAjustes Relevador de Distanciadali mojicaAún no hay calificaciones
- Carta de Aceptacion 2.0Documento1 páginaCarta de Aceptacion 2.0dali mojicaAún no hay calificaciones
- Unidad II Modulos FotovoltaicosDocumento150 páginasUnidad II Modulos Fotovoltaicosdali mojicaAún no hay calificaciones
- Motores de PropulsiónDocumento6 páginasMotores de Propulsióndali mojicaAún no hay calificaciones
- ArrancadoresDocumento25 páginasArrancadoresdali mojicaAún no hay calificaciones
- Máquinas TérmicasDocumento10 páginasMáquinas TérmicasDiego 117Aún no hay calificaciones
- Interruptores y SensoresDocumento27 páginasInterruptores y Sensoresdali mojicaAún no hay calificaciones
- Valores CC RGD Baja California 2021Documento85 páginasValores CC RGD Baja California 2021Ediee Juarez100% (1)
- Tanque MezcladorDocumento1 páginaTanque MezcladorreynaldoAún no hay calificaciones
- Manual de Rendimiento 2000 CATERPILLARDocumento1095 páginasManual de Rendimiento 2000 CATERPILLARnonopimentel96% (25)
- PreparacionelectricaDocumento4 páginasPreparacionelectricaEmanuel cortesAún no hay calificaciones
- Cmic Carreteras 2020Documento756 páginasCmic Carreteras 2020Carlos Iván Bueno Orona100% (5)
- ArrancadoresDocumento25 páginasArrancadoresdali mojicaAún no hay calificaciones
- Controles Eléctricos - Manual de Prácticas 2021Documento71 páginasControles Eléctricos - Manual de Prácticas 2021dali mojicaAún no hay calificaciones
- 6 Elementos de ProteccionDocumento25 páginas6 Elementos de ProteccionAzahel MartinezAún no hay calificaciones
- Elementos de SeñalizacionDocumento5 páginasElementos de Señalizaciondali mojicaAún no hay calificaciones
- Exposicion Ciclos de BraytonDocumento10 páginasExposicion Ciclos de Braytondali mojica100% (1)
- Mapas Mentales: Teoría, ejemplos y aplicacionesDocumento40 páginasMapas Mentales: Teoría, ejemplos y aplicacionesdali mojicaAún no hay calificaciones
- Motores de combustión interna: clasificación y tiposDocumento12 páginasMotores de combustión interna: clasificación y tiposdali mojicaAún no hay calificaciones
- Manual de Rendimiento 2000 CATERPILLARDocumento1095 páginasManual de Rendimiento 2000 CATERPILLARnonopimentel96% (25)
- Motores de Propulsión A ChorroDocumento6 páginasMotores de Propulsión A Chorrodali mojicaAún no hay calificaciones
- Mapas Mentales: Teoría, ejemplos y aplicacionesDocumento40 páginasMapas Mentales: Teoría, ejemplos y aplicacionesdali mojicaAún no hay calificaciones
- Sensores y ActuadoresDocumento32 páginasSensores y ActuadoresUriel PeñaAún no hay calificaciones
- 6 Elementos de ProteccionDocumento25 páginas6 Elementos de ProteccionAzahel MartinezAún no hay calificaciones
- Mantenimiento de Cámaras de Refrigeración y Congelación.Documento23 páginasMantenimiento de Cámaras de Refrigeración y Congelación.LuisAlbertoMartínezAún no hay calificaciones
- Barthes, Roland, Semiología y MedicinaDocumento11 páginasBarthes, Roland, Semiología y Medicinavruiz_206811Aún no hay calificaciones
- Alme32 1 PDFDocumento758 páginasAlme32 1 PDFIgnacio MartinezAún no hay calificaciones
- Estimacion de Reservas Mediante Método Volumetrico Aplicando Distribuciones Probabilisticas - Método Montecarlo Software Crystal BallDocumento18 páginasEstimacion de Reservas Mediante Método Volumetrico Aplicando Distribuciones Probabilisticas - Método Montecarlo Software Crystal Ballmariela nava riveraAún no hay calificaciones
- Lab 7. Informe de Laboratorio Mecánica de FluidosDocumento9 páginasLab 7. Informe de Laboratorio Mecánica de FluidosNicolás AndradeAún no hay calificaciones
- Qué Es El Interés CompuestoDocumento15 páginasQué Es El Interés CompuestoLuz ContrerasAún no hay calificaciones
- Numero 49Documento38 páginasNumero 49maria__luceroAún no hay calificaciones
- Fast CgiDocumento5 páginasFast CgiEdgar Alexander Esteves MillánAún no hay calificaciones
- Disponibilidad y confiabilidad de un sistema de bombeo de alcohol líquidoDocumento19 páginasDisponibilidad y confiabilidad de un sistema de bombeo de alcohol líquidoROGER MAURICIO GARCIA JIMENEZAún no hay calificaciones
- Ocros - Características Fisiográficas-FinalDocumento22 páginasOcros - Características Fisiográficas-Finale.huerta.epe0% (1)
- TALLER Grupal 06 CostosDocumento7 páginasTALLER Grupal 06 CostosJair0% (1)
- Instalacion Emu8086 y EjerciciosDocumento14 páginasInstalacion Emu8086 y EjerciciosLuis Viteri100% (1)
- Actividad 1. Cuadro ComparativoDocumento4 páginasActividad 1. Cuadro ComparativoLizeth H.Aún no hay calificaciones
- Pro Bab 1Documento5 páginasPro Bab 1marissamendietaAún no hay calificaciones
- Nodos y PunterosDocumento7 páginasNodos y PunterosAdrian ManjarresAún no hay calificaciones
- Chevrolet D-Max 3.L CD 4X2 TM N-04: Taller de Mantenimiento MecanicoDocumento15 páginasChevrolet D-Max 3.L CD 4X2 TM N-04: Taller de Mantenimiento MecanicojoseAún no hay calificaciones
- Actividad 2 Geometria Aplicada SW Onshape ItsaDocumento6 páginasActividad 2 Geometria Aplicada SW Onshape ItsaOlavis VelasquezAún no hay calificaciones
- S1 - Taller de TeoríaDocumento3 páginasS1 - Taller de TeoríaMayte SalazarAún no hay calificaciones
- Informe G2 - T6Documento5 páginasInforme G2 - T6Yanided Valladolis100% (2)
- Cálculo de reservas y productividad de petróleo y gas en yacimientos del PerúDocumento45 páginasCálculo de reservas y productividad de petróleo y gas en yacimientos del PerúYeison Bracho100% (1)
- Balance de Materiales de Reservorios de GasDocumento7 páginasBalance de Materiales de Reservorios de GasAdalin OlivaresAún no hay calificaciones
- D6K XL TRACK-TYPE TRACTOR Military HMG00001-UP (MACHINE) POWERED BY C6.6 Engine TORQUE CULATA PDFDocumento9 páginasD6K XL TRACK-TYPE TRACTOR Military HMG00001-UP (MACHINE) POWERED BY C6.6 Engine TORQUE CULATA PDFRICHARDAún no hay calificaciones
- 1 Problemas de Física. Tomo 3 (27a. Ed.) - (PG 14 - 58) Optica PDFDocumento45 páginas1 Problemas de Física. Tomo 3 (27a. Ed.) - (PG 14 - 58) Optica PDFYadira Fuentes50% (4)
- Tuberia de Agua Caliente y AccesoriosDocumento19 páginasTuberia de Agua Caliente y AccesoriosJose Fernando Sales FloresAún no hay calificaciones
- Cuadro Sinoptico de La Evolucion de La Investigacion de OperacionesDocumento2 páginasCuadro Sinoptico de La Evolucion de La Investigacion de OperacionesFERNANDO ISRAEL GONZALEZ HERNANDEZ100% (1)
- AerosolesDocumento6 páginasAerosolesLaura Janina Santos UribeAún no hay calificaciones
- ACTIVIDADES Ecuaciones 000Documento10 páginasACTIVIDADES Ecuaciones 000Vanessa MenendezAún no hay calificaciones
- SevillanasDocumento5 páginasSevillanasLaura EspejoAún no hay calificaciones
- Guía de Estudio Matematica 4to Tercer LapsoDocumento6 páginasGuía de Estudio Matematica 4to Tercer LapsoLuis F Uribe EAún no hay calificaciones
- Presión hidráulica ascendente en pilares de puentesDocumento15 páginasPresión hidráulica ascendente en pilares de puentesEddy Santiago Vasquez MolinaAún no hay calificaciones
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Teoría electromagnética para estudiantes de ingeniería: Notas de claseDe EverandTeoría electromagnética para estudiantes de ingeniería: Notas de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- La física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaDe EverandLa física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Análisis estadístico de datos multivariadosDe EverandAnálisis estadístico de datos multivariadosCalificación: 5 de 5 estrellas5/5 (1)
- Álgebra Tomo Ii: Hake MateDe EverandÁlgebra Tomo Ii: Hake MateCalificación: 5 de 5 estrellas5/5 (2)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Razonamiento Lógico Matemático para la toma de decisionesDe EverandRazonamiento Lógico Matemático para la toma de decisionesCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)