También podría gustarte
- Documento para El Apoyo Psicopedagogico MinerdDocumento260 páginasDocumento para El Apoyo Psicopedagogico MinerdMarcos Ortega90% (68)
- Plan de Ejecución de Obra CONSTRUCCION DE UN ALMACENDocumento28 páginasPlan de Ejecución de Obra CONSTRUCCION DE UN ALMACENMarbel Elias Garcia Mendo71% (7)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Manual Pata El Robot MitsubishiDocumento43 páginasManual Pata El Robot Mitsubishidulcemar520Aún no hay calificaciones
- Practica 5Documento33 páginasPractica 5sistemaelectricoAún no hay calificaciones
- Práctica 4 - RoboDk - OfflineDocumento9 páginasPráctica 4 - RoboDk - OfflineEdison AlvaradoAún no hay calificaciones
- Programación con lenguajes de guión en páginas web. IFCD0110De EverandProgramación con lenguajes de guión en páginas web. IFCD0110Aún no hay calificaciones
- Unidad 1 Saber 1PROGRAMACION DE ROBOTSDocumento17 páginasUnidad 1 Saber 1PROGRAMACION DE ROBOTSLUIS HUMBERTO DEL PRADO AGUIRREAún no hay calificaciones
- Robótics ProgrammingDocumento9 páginasRobótics ProgrammingGuillermo MoranAún no hay calificaciones
- Programacion de Robots-Jose OvallesDocumento7 páginasProgramacion de Robots-Jose OvallesJ_OvallesAún no hay calificaciones
- Metodos de Programacion de RobotsDocumento20 páginasMetodos de Programacion de RobotsDavid Shure XivAún no hay calificaciones
- Instrucciones de MovimientoDocumento16 páginasInstrucciones de MovimientoVera SheerlayAún no hay calificaciones
- Resumen Unidad 3Documento5 páginasResumen Unidad 3Gabriela LlerenaAún no hay calificaciones
- Programacion de RobotsDocumento43 páginasProgramacion de RobotsOMEGA LUL KAPPAAún no hay calificaciones
- Guía Células de ManufacturaDocumento8 páginasGuía Células de ManufacturaAlberto RamirezAún no hay calificaciones
- 1 Programación de RobotsDocumento29 páginas1 Programación de RobotsMoraditoAún no hay calificaciones
- 13-18 U2Documento6 páginas13-18 U2Carlos GodinezAún no hay calificaciones
- Entorno de Programación de Robots Industriales U2Documento70 páginasEntorno de Programación de Robots Industriales U2bombon fabe100% (1)
- Tema Intro A La Programacic3b3n Robomind Ticom 1c2ba BachDocumento13 páginasTema Intro A La Programacic3b3n Robomind Ticom 1c2ba BachJorge CalvilloAún no hay calificaciones
- ProgramacionDocumento12 páginasProgramacionJohn GavilanezAún no hay calificaciones
- Entradas digitales FANUC LR Mate 200iCDocumento7 páginasEntradas digitales FANUC LR Mate 200iCELISEO ORTEGA SANCHEZAún no hay calificaciones
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDocumento5 páginasLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioAún no hay calificaciones
- Tarea2 NRC7623 DefazBryanDocumento14 páginasTarea2 NRC7623 DefazBryanBRYAN FERNANDO DEFAZ CORDOVAAún no hay calificaciones
- Manual de Robomind ESPAÑOL PDFDocumento15 páginasManual de Robomind ESPAÑOL PDFInstitución Educativa Peruano SuizoAún no hay calificaciones
- Programación de RobotsDocumento43 páginasProgramación de RobotsEduardo Jose HerreraAún no hay calificaciones
- Introducción A La Programación PDFDocumento14 páginasIntroducción A La Programación PDFLowiseAún no hay calificaciones
- Introducción A La Programación.Documento14 páginasIntroducción A La Programación.LowiseAún no hay calificaciones
- Programación de Un Robot IndustrialDocumento27 páginasProgramación de Un Robot IndustrialPaúl MartínezAún no hay calificaciones
- Ud02 ProgramacionDocumento9 páginasUd02 ProgramacionmparejacursoAún no hay calificaciones
- Criterios de instalación y programación de un robotDocumento29 páginasCriterios de instalación y programación de un robotdelfino8Aún no hay calificaciones
- Manual de Prácticas - Robótica - ERB-58-67Documento10 páginasManual de Prácticas - Robótica - ERB-58-67Axel BelloAún no hay calificaciones
- Ri Ud3 Ud4Documento199 páginasRi Ud3 Ud4Borja meiriño lagoAún no hay calificaciones
- Unidad 2Documento24 páginasUnidad 2JanethAún no hay calificaciones
- Programación de RobotsDocumento11 páginasProgramación de RobotsAnonymous KxLM7LFreAún no hay calificaciones
- Eeit Eeit-616 Robotica TrabajofinalDocumento14 páginasEeit Eeit-616 Robotica Trabajofinalmchira312Aún no hay calificaciones
- Tarea#1 - Parcial#2 - Robotica - Grupo 2Documento3 páginasTarea#1 - Parcial#2 - Robotica - Grupo 2Edwin TrochezAún no hay calificaciones
- Tarea Robotica. Control de Fuerza y Programacion de RobotsDocumento4 páginasTarea Robotica. Control de Fuerza y Programacion de RobotsFabian PatiñoAún no hay calificaciones
- ACORDEONDocumento2 páginasACORDEONMoraditoAún no hay calificaciones
- Paper RV-M1Documento5 páginasPaper RV-M1dickforusAún no hay calificaciones
- Proyecto 2 AlumnosDocumento14 páginasProyecto 2 Alumnosalejandro.llorensAún no hay calificaciones
- UNIDADESDocumento6 páginasUNIDADESEduardo GonzalezAún no hay calificaciones
- Emit Emit-522 Formatoalumnotrabajofinal 25Documento11 páginasEmit Emit-522 Formatoalumnotrabajofinal 25Dariel Sebastian CbAún no hay calificaciones
- TraBajo CAPITULO 7 ROBOTICADocumento9 páginasTraBajo CAPITULO 7 ROBOTICAAlan LunaAún no hay calificaciones
- LAB.5 Agustin SánchezDocumento10 páginasLAB.5 Agustin SánchezÁngel CruzAún no hay calificaciones
- Labo. Final 2. RoboticaDocumento9 páginasLabo. Final 2. RoboticaJheral Ramírez NavarroAún no hay calificaciones
- Resumen de La Unidad Ii - Programacion de RobotsDocumento6 páginasResumen de La Unidad Ii - Programacion de RobotsCarpege875Aún no hay calificaciones
- Manualejercicios PendantDocumento10 páginasManualejercicios PendantRaúl AnelAún no hay calificaciones
- ROBOTICA EnsayoDocumento8 páginasROBOTICA EnsayoJordi AlorAún no hay calificaciones
- Actividad Sumativa 3Documento3 páginasActividad Sumativa 3Azul GonzálezAún no hay calificaciones
- Practica 2 Robotf1Documento16 páginasPractica 2 Robotf1Rubén BuenañoAún no hay calificaciones
- Lenguajes de Progración de RobotsDocumento14 páginasLenguajes de Progración de RobotsEdgar Antonio Rocha SolísAún no hay calificaciones
- Actividad 5Documento5 páginasActividad 5alfredoAún no hay calificaciones
- Proyecto Final RoboticaDocumento10 páginasProyecto Final RoboticaMichael ThebbesiAún no hay calificaciones
- Clase 21Documento33 páginasClase 21Fernando Cardenas GomezAún no hay calificaciones
- Programacion de Robots y LenguajesDocumento21 páginasProgramacion de Robots y LenguajesurielhdzAún no hay calificaciones
- P3 2T2019 RoboDkDocumento9 páginasP3 2T2019 RoboDkAngel ValenciaAún no hay calificaciones
- Diseño de Algoritmos _ PseudocódigoDocumento33 páginasDiseño de Algoritmos _ PseudocódigoJuanCamiloLoboaCarabaliAún no hay calificaciones
- Programación de RobotsDocumento18 páginasProgramación de RobotsRicardo Gallarzo Jr.Aún no hay calificaciones
- Movimientos del robot Mitsubishi RV2AJDocumento17 páginasMovimientos del robot Mitsubishi RV2AJDavid LagunasAún no hay calificaciones
- Guia 6Documento24 páginasGuia 6bookskskAún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- La Biblioteca Escolar Como Recurso EducativoDocumento28 páginasLa Biblioteca Escolar Como Recurso Educativote veo te veoAún no hay calificaciones
- Organizacion de Los Espacios en La EscuelaDocumento21 páginasOrganizacion de Los Espacios en La Escuelate veo te veoAún no hay calificaciones
- El Perfil Docente para La Enseanza de Alumnos Adultos de Edades Intermedia y Tarda Del Departamento de Derecho y Ciencia PolticaDocumento7 páginasEl Perfil Docente para La Enseanza de Alumnos Adultos de Edades Intermedia y Tarda Del Departamento de Derecho y Ciencia Polticamartha.isAún no hay calificaciones
- 9 Características de La Andragogia.Documento2 páginas9 Características de La Andragogia.te veo te veoAún no hay calificaciones
- Etapas de La Investigación EducativaDocumento24 páginasEtapas de La Investigación EducativaCarlos Alvarez50% (2)
- Amador-2016-ANTECEDENTES DE LA SUPERVISIÓN EN LA REPÚBLICA DOMINICANADocumento3 páginasAmador-2016-ANTECEDENTES DE LA SUPERVISIÓN EN LA REPÚBLICA DOMINICANAte veo te veoAún no hay calificaciones
- Let 012 Unidad III EjercicioDocumento3 páginasLet 012 Unidad III EjercicioAlexa MaryAún no hay calificaciones
- PROYECTODocumento64 páginasPROYECTOte veo te veoAún no hay calificaciones
- Ficha de Observacion de ClasesDocumento5 páginasFicha de Observacion de Claseste veo te veoAún no hay calificaciones
- 222 748 1 PBDocumento12 páginas222 748 1 PBhenaretaAún no hay calificaciones
- Sistema CADDocumento15 páginasSistema CADDoc_U100% (8)
- El Perfil Docente para La Enseanza de Alumnos Adultos de Edades Intermedia y Tarda Del Departamento de Derecho y Ciencia PolticaDocumento7 páginasEl Perfil Docente para La Enseanza de Alumnos Adultos de Edades Intermedia y Tarda Del Departamento de Derecho y Ciencia Polticamartha.isAún no hay calificaciones
- Formacionpce 6Documento58 páginasFormacionpce 6pedrocascaAún no hay calificaciones
- Dialnet AndragogiaAndragogosYSusAportaciones 6521968 PDFDocumento13 páginasDialnet AndragogiaAndragogosYSusAportaciones 6521968 PDFJair Orozco Torres0% (1)
- Registro 6to.-Grado 2018Documento167 páginasRegistro 6to.-Grado 2018te veo te veoAún no hay calificaciones
- Dialnet LaEducacionReligiosaEscolarizada 4897679 PDFDocumento16 páginasDialnet LaEducacionReligiosaEscolarizada 4897679 PDFYraidis Pertuz RobleAún no hay calificaciones
- Registro 4to.-Grado 2018Documento166 páginasRegistro 4to.-Grado 2018te veo te veoAún no hay calificaciones
- Dialnet Modernizacion 26607 PDFDocumento8 páginasDialnet Modernizacion 26607 PDFjoses_214Aún no hay calificaciones
- Registro Inicial de Ninos y Ninas 5 AnosDocumento73 páginasRegistro Inicial de Ninos y Ninas 5 Anoste veo te veoAún no hay calificaciones
- Registro 1er.-Grado 2018Documento148 páginasRegistro 1er.-Grado 2018te veo te veoAún no hay calificaciones
- Obesidad Crónica Causas y SolucionesDocumento1 páginaObesidad Crónica Causas y Solucioneste veo te veoAún no hay calificaciones
- Dialnet SobreElRendimientoEscolar 5475216Documento38 páginasDialnet SobreElRendimientoEscolar 5475216TeejoAún no hay calificaciones
- Bases de La Revision y Actualizacion CurricularDocumento120 páginasBases de La Revision y Actualizacion Curricularrichard pmAún no hay calificaciones
- Como Ser Un Buen MaestrooDocumento1 páginaComo Ser Un Buen Maestroote veo te veoAún no hay calificaciones
- Vdocuments - MX - Los Medios y Materiales Educativos 55c9a1912b0b1 PDFDocumento80 páginasVdocuments - MX - Los Medios y Materiales Educativos 55c9a1912b0b1 PDFte veo te veoAún no hay calificaciones
- Competencias Fundamentales EspecificasDocumento5 páginasCompetencias Fundamentales Especificaste veo te veoAún no hay calificaciones
- Vdocuments - MX - Los Medios y Materiales Educativos 55c9a1912b0b1 PDFDocumento80 páginasVdocuments - MX - Los Medios y Materiales Educativos 55c9a1912b0b1 PDFte veo te veoAún no hay calificaciones
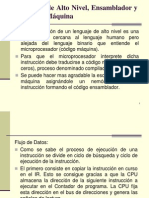
- Lenguajes de Alto Nivel, Ensamblador y Código de MáquinaDocumento26 páginasLenguajes de Alto Nivel, Ensamblador y Código de MáquinaCarlos Rodriguez BernalAún no hay calificaciones
- Retorna El Carro Con El Modelo Dado Por ParámetroDocumento4 páginasRetorna El Carro Con El Modelo Dado Por ParámetroDavid Viveros RojasAún no hay calificaciones
- Ejercicios de concurrencia resueltos en JavaDocumento58 páginasEjercicios de concurrencia resueltos en JavaYubeysi SalazarAún no hay calificaciones
- Resumen de Funciones y Otras Cosas de MYSQLDocumento11 páginasResumen de Funciones y Otras Cosas de MYSQLIgnacio LaizAún no hay calificaciones
- S03 S1-MaterialDocumento17 páginasS03 S1-MaterialJose VasquezAún no hay calificaciones
- U2 - A3 Instalar Visualino y Conceptos BásicosDocumento6 páginasU2 - A3 Instalar Visualino y Conceptos BásicosABDIEL RAUL GARCIA MONTIELAún no hay calificaciones
- Creación de factura con macros en ExcelDocumento25 páginasCreación de factura con macros en ExcelMónica ArboledaAún no hay calificaciones
- Introduccion Al Modelado Visual y Rational Rose-PresentacionesDocumento8 páginasIntroduccion Al Modelado Visual y Rational Rose-Presentaciones40514648Aún no hay calificaciones
- Grupo6 HRRN y Colas de ProcesosDocumento3 páginasGrupo6 HRRN y Colas de ProcesosChristian RodríguezAún no hay calificaciones
- Moises Gajardo 1Documento6 páginasMoises Gajardo 1Juan GajardoAún no hay calificaciones
- Tema 2 Fases y Pasos de La MOODocumento2 páginasTema 2 Fases y Pasos de La MOOAna Gabriela Caldera AlvaradoAún no hay calificaciones
- Guia Didactica Organizacion y Arquitectura de Computadoras Magdalena DuranDocumento16 páginasGuia Didactica Organizacion y Arquitectura de Computadoras Magdalena DuranAlexander Mello MorganAún no hay calificaciones
- MySQL - EggDocumento63 páginasMySQL - EggSebas F71Aún no hay calificaciones
- Capitulo 3Documento30 páginasCapitulo 3Arthuro EscuderoAún no hay calificaciones
- Las Tres Partes de Una Competencia Educativa SonDocumento3 páginasLas Tres Partes de Una Competencia Educativa SonJulio Davinson Q FAún no hay calificaciones
- Programacion AplicadaDocumento12 páginasProgramacion AplicadaWilly Arnold Valencia CamayoAún no hay calificaciones
- Recopilacion de ProgramacionDocumento40 páginasRecopilacion de ProgramacionRubén MuesesAún no hay calificaciones
- POO - II - V - Guía de Aprendizaje 02Documento3 páginasPOO - II - V - Guía de Aprendizaje 02NOELIA JHANIRA CERNA QUIROGAAún no hay calificaciones
- Preguntas A Contestar ProgramacionDocumento3 páginasPreguntas A Contestar ProgramacionDebora LemosAún no hay calificaciones
- Manual TécnicoDocumento4 páginasManual TécnicoLuis RomeroAún no hay calificaciones
- Desarrollo de aplicaciones web con PHPDocumento7 páginasDesarrollo de aplicaciones web con PHPDAVID JIMENEZ PEÑAAún no hay calificaciones
- Programación ArduinoDocumento7 páginasProgramación ArduinoJUAREZ LEON YEIMI NICOLAún no hay calificaciones
- Informe 02Documento6 páginasInforme 02Lupaca FrankAún no hay calificaciones
- Práctica 1 - Bandera ZDocumento9 páginasPráctica 1 - Bandera ZUES ALANAún no hay calificaciones
- Semana 01Documento152 páginasSemana 01Nils Joes Avelino MuñozAún no hay calificaciones
- La Importancia de La Planificación y La ProgramaciónDocumento5 páginasLa Importancia de La Planificación y La ProgramaciónRoberto MansillaAún no hay calificaciones
- 1-Manual de Conexion A La Base de Datos Con JavaDocumento12 páginas1-Manual de Conexion A La Base de Datos Con JavaAlbertjj7Aún no hay calificaciones
- 1 Deshabilitar Tecla ShiftDocumento20 páginas1 Deshabilitar Tecla ShiftjavierAún no hay calificaciones
- Semejanzas y DiferenciasDocumento14 páginasSemejanzas y DiferenciasMiriam GRAún no hay calificaciones