También podría gustarte
- Problemario de Flujo de FluidosDocumento10 páginasProblemario de Flujo de FluidosCasidy Oxna100% (3)
- Molino de BolasDocumento91 páginasMolino de BolasJavier Serpa Quispe100% (4)
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Ejercicios de Ecuaciones Diferenciales OrdinariasDe EverandEjercicios de Ecuaciones Diferenciales OrdinariasCalificación: 4 de 5 estrellas4/5 (1)
- Vibraciones MecánicasDocumento36 páginasVibraciones MecánicasCarlos EduardoAún no hay calificaciones
- Diapositivas Cap 3, Ramirez, Rodriguez, Yambo, SanchezDocumento51 páginasDiapositivas Cap 3, Ramirez, Rodriguez, Yambo, SanchezEsteban RamírezAún no hay calificaciones
- Manual S52 PDFDocumento131 páginasManual S52 PDFAlvaro Sequeira El-Azar75% (4)
- TEMA 5 Transformaciones LinealesDocumento4 páginasTEMA 5 Transformaciones LinealesLalo AlmarazAún no hay calificaciones
- Control de La MicroestructuraDocumento13 páginasControl de La MicroestructuraLalo AlmarazAún no hay calificaciones
- Vibración Forzada No AmortiguadaDocumento3 páginasVibración Forzada No AmortiguadaAlejandra Katherine Sanchez MezaAún no hay calificaciones
- Mineria Sin RielesDocumento54 páginasMineria Sin RielesManu Garces100% (5)
- Vibraciones Forzadas y 2 EjerciciosDocumento6 páginasVibraciones Forzadas y 2 EjerciciosLuis Arturo Jara Bardales86% (7)
- Vibraciones de Sistemas de Un Grado de Libertad Con Excitación ArmónicaDocumento25 páginasVibraciones de Sistemas de Un Grado de Libertad Con Excitación ArmónicaHéctor Ramírez SernaAún no hay calificaciones
- Resuesta de Un Grado de LibertadDocumento5 páginasResuesta de Un Grado de LibertadJean Valverde Garcia100% (1)
- Criterios Plastificación y RoturaDocumento30 páginasCriterios Plastificación y RoturaMarco Saravia100% (1)
- Evaluacion Tecnica SDLG LG956L Miko ContruccionesDocumento14 páginasEvaluacion Tecnica SDLG LG956L Miko ContruccionesAnderson LopezAún no hay calificaciones
- Seleccion y Reemplazo de EquiposDocumento57 páginasSeleccion y Reemplazo de EquiposOscar Quispe RamosAún no hay calificaciones
- Vibracion Excitada Armonicamente - Ixme 01Documento21 páginasVibracion Excitada Armonicamente - Ixme 01Jhonatan EchegarayAún no hay calificaciones
- Capitulo 1Documento50 páginasCapitulo 1Yecid MauricioAún no hay calificaciones
- Unidad 3. Vibraciones 2.0Documento34 páginasUnidad 3. Vibraciones 2.0Gerardo HernándezAún no hay calificaciones
- Modelado de Sistemas DinámicosDocumento19 páginasModelado de Sistemas DinámicosPatricioArrienAún no hay calificaciones
- Movimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoDocumento11 páginasMovimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoAlan Ramirez RojasAún no hay calificaciones
- Clase 3 Fi204mnDocumento21 páginasClase 3 Fi204mnNahid Chiara GarciaAún no hay calificaciones
- Clase 3 Fi204mnDocumento21 páginasClase 3 Fi204mnMARIELLA YANNET MARTINEZ LLERENAAún no hay calificaciones
- Tema 4-Oscilaciones Con Un Grado de LibertadDocumento57 páginasTema 4-Oscilaciones Con Un Grado de LibertadAndrea EspinosaAún no hay calificaciones
- Teoría de PerturbacionesDocumento9 páginasTeoría de PerturbacionesESTHER ISABEL CEBALLOS PORTILLOAún no hay calificaciones
- Unidad 6 DinámicaDocumento15 páginasUnidad 6 DinámicaItzel Sarai Lázaro CerinoAún no hay calificaciones
- Vibración Armónica ExcitadaDocumento60 páginasVibración Armónica ExcitadaEstefania Pallo50% (2)
- Grados de LibertadDocumento8 páginasGrados de LibertadjeicofAún no hay calificaciones
- Aplicaciones de La Transformada de FourierDocumento5 páginasAplicaciones de La Transformada de FourierYiOo18Aún no hay calificaciones
- N° 2 Elementos Biarticulados PDFDocumento3 páginasN° 2 Elementos Biarticulados PDFYuli Pariona SincheAún no hay calificaciones
- Unidad5C Teoria PDFDocumento9 páginasUnidad5C Teoria PDFJuanita Higuera TellezAún no hay calificaciones
- Diapsitivas de Vibraciones Forzadas PresentacionDocumento40 páginasDiapsitivas de Vibraciones Forzadas PresentacionSegundo Andres Diaz Fernandez100% (2)
- Excitacion Impulsiva e Integral-Ruth Yaneth Alata AcuñaDocumento27 páginasExcitacion Impulsiva e Integral-Ruth Yaneth Alata AcuñaYn YaneAún no hay calificaciones
- s10 U4 3 Ecuaciones Vibraciones ForzadasDocumento40 páginass10 U4 3 Ecuaciones Vibraciones ForzadasJorge EsquerreAún no hay calificaciones
- Apunte Tecnico - Oscilaciones de 1 GDL - ANYWHODocumento44 páginasApunte Tecnico - Oscilaciones de 1 GDL - ANYWHOEdison Segama GuzmánAún no hay calificaciones
- Nota Técnica 4Documento10 páginasNota Técnica 4DAVID FERIA LOPEZAún no hay calificaciones
- Expo Dinamica VibracionDocumento8 páginasExpo Dinamica VibracionLuis Fernando Jave HerasAún no hay calificaciones
- MATERIAL DIDACTICO Vibraciones LIBRE-AMORTIGUADODocumento19 páginasMATERIAL DIDACTICO Vibraciones LIBRE-AMORTIGUADOKtiik MosqueraAún no hay calificaciones
- Material Didactico Vibraciones Libre-AmortiguadoDocumento19 páginasMaterial Didactico Vibraciones Libre-AmortiguadoAnto PMontoyaAún no hay calificaciones
- 08 Diseño Sismorresistente Sistemas Armonicos 1GLDocumento14 páginas08 Diseño Sismorresistente Sistemas Armonicos 1GLAlejandro Cortijo CastilloAún no hay calificaciones
- Capitulo 3 Ondas y Vibraciones PDFDocumento33 páginasCapitulo 3 Ondas y Vibraciones PDFjhoanaAún no hay calificaciones
- 4.1. Movimiento OscilatorioDocumento5 páginas4.1. Movimiento OscilatorioYefar Yordi Natividad AparicioAún no hay calificaciones
- Ondas PlanasDocumento31 páginasOndas PlanasAdrian TecAún no hay calificaciones
- MC 571 Capitulo 2 Respuesta Bajo Excitacion ArmonicaDocumento79 páginasMC 571 Capitulo 2 Respuesta Bajo Excitacion ArmonicaJorch Galvan HuamaniAún no hay calificaciones
- Aplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorDocumento23 páginasAplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorSoporteFM Proceso0% (1)
- Oscilaciones Forzadas Del Péndulo de Pohl - Informde de LaboratorioDocumento7 páginasOscilaciones Forzadas Del Péndulo de Pohl - Informde de LaboratorioFERNANDO ALFONSO PATIÑO RODRÍGUEZAún no hay calificaciones
- Marco Teórico OscilacionesDocumento2 páginasMarco Teórico OscilacionesNicolas Peña100% (1)
- Apuntes Vibraciones ForzadasDocumento36 páginasApuntes Vibraciones ForzadasJairo RondónAún no hay calificaciones
- Sesion 01 PDFDocumento12 páginasSesion 01 PDFchowventAún no hay calificaciones
- Movimiento Armónico SimpleDocumento11 páginasMovimiento Armónico SimpleEmanuel Santa Cruz CasianoAún no hay calificaciones
- Diapositiva 1. MOVIMIENTO AMÓNICO SIMPLEDocumento10 páginasDiapositiva 1. MOVIMIENTO AMÓNICO SIMPLEJeancarlos CamposAún no hay calificaciones
- Clase de Ec. Dif. #17Documento8 páginasClase de Ec. Dif. #17Mirio Arevalo BardalesAún no hay calificaciones
- Oscilador Forzado y ResonanciaDocumento15 páginasOscilador Forzado y ResonanciaABISAI RASCON ESTRADAAún no hay calificaciones
- Matematicas TandazoDocumento10 páginasMatematicas TandazoAbrahamRenteriaAún no hay calificaciones
- Dinamica EstructuralDocumento20 páginasDinamica EstructuralTORRES MORENO ANA MARIAAún no hay calificaciones
- Dinamica Estructural - Capitulo II ResumenDocumento14 páginasDinamica Estructural - Capitulo II ResumenMich SusañaAún no hay calificaciones
- El Sismo y Sus Espectros.Documento13 páginasEl Sismo y Sus Espectros.Luis C. Pérez TatoAún no hay calificaciones
- Ondas PlanasDocumento31 páginasOndas PlanasAnonymous A7UUJmAún no hay calificaciones
- Vibraciones Libres de ParticulasDocumento6 páginasVibraciones Libres de Particulasrosmeri29Aún no hay calificaciones
- Aplicaciones de La Física EstadísticaDocumento7 páginasAplicaciones de La Física EstadísticaMartín VueltaAún no hay calificaciones
- Ecuación de La Membrana VibratoriaDocumento29 páginasEcuación de La Membrana VibratoriaKlever Guaman50% (2)
- MC 571 Capitulo 1 Introduccion A Vibraciones Respuesta LibreDocumento88 páginasMC 571 Capitulo 1 Introduccion A Vibraciones Respuesta LibreJorch Galvan HuamaniAún no hay calificaciones
- Modelos MatematicoshjDocumento37 páginasModelos MatematicoshjArgelio Arias SanchezAún no hay calificaciones
- Vibraciones Libres Amortiguadas, MoyDocumento7 páginasVibraciones Libres Amortiguadas, MoyMoises De La CruzAún no hay calificaciones
- EDOS1 Intro PDFDocumento7 páginasEDOS1 Intro PDFRubén GilAún no hay calificaciones
- Teoría de PerturbacionesDocumento5 páginasTeoría de PerturbacionesHaji MartínezAún no hay calificaciones
- Promocion de Hospitales Ginepedia Sauces PDFDocumento11 páginasPromocion de Hospitales Ginepedia Sauces PDFLalo AlmarazAún no hay calificaciones
- LIJTODocumento31 páginasLIJTOLalo AlmarazAún no hay calificaciones
- CATALOGODocumento10 páginasCATALOGOLalo AlmarazAún no hay calificaciones
- Subtema 3.2 TeoriaDocumento13 páginasSubtema 3.2 TeoriaLalo AlmarazAún no hay calificaciones
- Control de La MicroestructuraDocumento13 páginasControl de La MicroestructuraLalo AlmarazAún no hay calificaciones
- Práctica 1Documento2 páginasPráctica 1Lalo AlmarazAún no hay calificaciones
- Tarea 4 y 5 Elec y Mag - Meca - 1Documento3 páginasTarea 4 y 5 Elec y Mag - Meca - 1Lalo Almaraz0% (1)
- DUREZADocumento21 páginasDUREZADanilo ILaquize AltamiranoAún no hay calificaciones
- Planta de Formaldehido PDFDocumento47 páginasPlanta de Formaldehido PDFJuanSosaAún no hay calificaciones
- Dilatación Del TiempoDocumento4 páginasDilatación Del TiempoDaniela Muñoz S?Aún no hay calificaciones
- Solucionario: Universidad Nacional de IngenieriaDocumento4 páginasSolucionario: Universidad Nacional de IngenieriaAlvaro RodrigoAún no hay calificaciones
- Laboratorio1-Reconocimiento Del LaboratorioDocumento20 páginasLaboratorio1-Reconocimiento Del LaboratorioDavid UzhcaAún no hay calificaciones
- Laboratorio Solidos 2Documento18 páginasLaboratorio Solidos 2Yineth Lozano CastilloAún no hay calificaciones
- CAP VII - Elementos de Control Final-REPSOLrevisarDocumento20 páginasCAP VII - Elementos de Control Final-REPSOLrevisarariel100% (1)
- Sustitutorio Mecanica de Suelos IDocumento15 páginasSustitutorio Mecanica de Suelos IAnonymous mGHMcBXQAún no hay calificaciones
- Informe 2. Bomba CentrífugaDocumento8 páginasInforme 2. Bomba CentrífugaJorge Alberto Cuellar BolivarAún no hay calificaciones
- Altern AdoresDocumento41 páginasAltern Adoresmarcelo alfaroAún no hay calificaciones
- Unidad II - Semana 3 - Carga Multiaxial y Temp. - Práctica Sol.Documento13 páginasUnidad II - Semana 3 - Carga Multiaxial y Temp. - Práctica Sol.Pablo Cesar Poma ArrateaAún no hay calificaciones
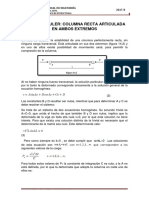
- Columna Con Ambos Extremos ArticuladosDocumento9 páginasColumna Con Ambos Extremos ArticuladosLuis Alberto CurasiAún no hay calificaciones
- GuiaDocumento20 páginasGuiaJanne ChAún no hay calificaciones
- Split SetsDocumento3 páginasSplit SetsBrayan Barzola RomeroAún no hay calificaciones
- c110 YumboDocumento65 páginasc110 YumboGedher DávilaAún no hay calificaciones
- Ejercicio 5Documento5 páginasEjercicio 5Erick Mejia SalvatierraAún no hay calificaciones
- Dinamica IndiceDocumento6 páginasDinamica IndiceLuis Horacio Interiano ZarateAún no hay calificaciones
- Rodado de TurbinafdfdfDocumento10 páginasRodado de TurbinafdfdfAngel Alberto Porras CordobaAún no hay calificaciones
- Ley de HookeDocumento7 páginasLey de HookeAngélicaRomeroAún no hay calificaciones
- BuggyDocumento8 páginasBuggyRodrigo SilvaAún no hay calificaciones
- Trabajo de Control 2da ParteDocumento6 páginasTrabajo de Control 2da Partenaturo Samata valderramaAún no hay calificaciones
- Ge Rivera DieselDocumento2 páginasGe Rivera DieseljlledwinestebanAún no hay calificaciones