También podría gustarte
- Auditoría de Procesos Logísticos VDA 6 PDFDocumento180 páginasAuditoría de Procesos Logísticos VDA 6 PDFUriel MartinezAún no hay calificaciones
- Certificado ElectoralDocumento1 páginaCertificado ElectoralKaren RubioAún no hay calificaciones
- Ejercicio 26 PC 5to.Documento8 páginasEjercicio 26 PC 5to.Mynor GarciaAún no hay calificaciones
- Nuevas Niif 2020Documento4 páginasNuevas Niif 2020Flor RomeroAún no hay calificaciones
- Tesis Doctoral Rafael Caballero JiménezDocumento651 páginasTesis Doctoral Rafael Caballero JiménezJonathan Castro ManriqueAún no hay calificaciones
- 2016 - SIC II Introducción y Plan de CuentasDocumento21 páginas2016 - SIC II Introducción y Plan de CuentasOsvaldo100% (1)
- CotizacionesDocumento1 páginaCotizacionesyazminAún no hay calificaciones
- Final Ejercicios Examen Recuperacion Algebra 1Documento12 páginasFinal Ejercicios Examen Recuperacion Algebra 1Carolina FigueroaAún no hay calificaciones
- Proceso de Contratacion y Nomina 12Documento8 páginasProceso de Contratacion y Nomina 12Stefannie CastilloAún no hay calificaciones
- Guia Practica para La Implementacion Del Enfoque BPM y La Mejora Continua en El CITIDocumento10 páginasGuia Practica para La Implementacion Del Enfoque BPM y La Mejora Continua en El CITISergio GonzalesAún no hay calificaciones
- Flujo de Caja Proyectado 10 Años Van y TirDocumento2 páginasFlujo de Caja Proyectado 10 Años Van y TirAlberto Espinoza100% (1)
- Matrices: historia, definición y operaciones básicasDocumento12 páginasMatrices: historia, definición y operaciones básicasJulio Barreto GarciaAún no hay calificaciones
- MP Una Bendicion La Lluvia, S. A. 2023Documento2 páginasMP Una Bendicion La Lluvia, S. A. 2023WENDY lOPEZAún no hay calificaciones
- Diver Perito Solucion A Ejercicio Clasificacion de CuentasDocumento17 páginasDiver Perito Solucion A Ejercicio Clasificacion de Cuentaskabazorro kbazorroAún no hay calificaciones
- Matematicas FinancierasDocumento177 páginasMatematicas Financierasjulio cesarAún no hay calificaciones
- Simple ContabilidadDocumento2 páginasSimple ContabilidadMaxi0% (1)
- Ejercicio Contabilidad Informatizada CFIDocumento3 páginasEjercicio Contabilidad Informatizada CFIcabazorro07Aún no hay calificaciones
- Caso IntegradorDocumento3 páginasCaso IntegradorMICADO TINEO CAMPOSAún no hay calificaciones
- A - Desigualdades Red BuenoDocumento45 páginasA - Desigualdades Red Buenojaviersp1Aún no hay calificaciones
- TALLER GRUPO 8 PM Ana Maria Gutierrez EstradaDocumento13 páginasTALLER GRUPO 8 PM Ana Maria Gutierrez EstradaAna Gutiérrez EstradaAún no hay calificaciones
- Guiapractica-Patrimonialcurso352-6 - 1Documento195 páginasGuiapractica-Patrimonialcurso352-6 - 1Dany Beatriz100% (1)
- Balances Guía Práctica para Su PresentaciónDocumento14 páginasBalances Guía Práctica para Su PresentaciónMónica ZabaloyAún no hay calificaciones
- Bottaro. .Documento456 páginasBottaro. .Adriana LeggioAún no hay calificaciones
- Uocra 2007Documento51 páginasUocra 2007Gustavo HasperueAún no hay calificaciones
- Mapa estratégico y cuadro de mando integral en educación media públicaDocumento30 páginasMapa estratégico y cuadro de mando integral en educación media públicajorgetttAún no hay calificaciones
- Laboratorio 1¿Documento1 páginaLaboratorio 1¿juAún no hay calificaciones
- CDD - Introducción A La ContaduríaDocumento127 páginasCDD - Introducción A La ContaduríaLeidy BAYONA FuentesAún no hay calificaciones
- Augusto Chaves Ochoa EnriqueDocumento2 páginasAugusto Chaves Ochoa EnriqueAugusto ChavesAún no hay calificaciones
- Informe FinalDocumento41 páginasInforme Finalnelson17011976Aún no hay calificaciones
- Cortaduras DedekindDocumento24 páginasCortaduras DedekindWilliam AmssAún no hay calificaciones
- Matemática Financiera-Justo Mercado PDFDocumento24 páginasMatemática Financiera-Justo Mercado PDFminesponceAún no hay calificaciones
- Ejercicios ParoDocumento1 páginaEjercicios ParoMirri Miras GarcíaAún no hay calificaciones
- Resultados y Balance Purificadora Verapaz 2018Documento24 páginasResultados y Balance Purificadora Verapaz 2018Nathanael ChénAún no hay calificaciones
- Fundamentos epistemológicos de la contabilidadDocumento15 páginasFundamentos epistemológicos de la contabilidadPablo RaffaelliAún no hay calificaciones
- Medición de estados contablesDocumento18 páginasMedición de estados contablesBahamondes OscarAún no hay calificaciones
- 8-RENTAS VARIABLES GUÍA (Sin Perpetuas y Restricciones)Documento17 páginas8-RENTAS VARIABLES GUÍA (Sin Perpetuas y Restricciones)Luli CaneAún no hay calificaciones
- Parcial 1 Estadistica AplicadaDocumento11 páginasParcial 1 Estadistica AplicadakarinaAún no hay calificaciones
- Guia de Instrumentos CuantitativosDocumento42 páginasGuia de Instrumentos CuantitativosSeba Velardo0% (1)
- Chillida C. 2013. Análisis e Interpretación de BalancesDocumento381 páginasChillida C. 2013. Análisis e Interpretación de BalancesLaura BellardiAún no hay calificaciones
- (Wilensky) Marketing EstratégicoDocumento166 páginas(Wilensky) Marketing EstratégicoRominaAún no hay calificaciones
- Unacem - M3 PDFDocumento2 páginasUnacem - M3 PDFGuille LRAún no hay calificaciones
- 1 - Introducción A La Prueba de HipótesisDocumento6 páginas1 - Introducción A La Prueba de HipótesisMiguel Díaz Leon100% (2)
- Programación lineal: Ejercicios de inecuacionesDocumento44 páginasProgramación lineal: Ejercicios de inecuacionesMartina Pérez GutiérrezAún no hay calificaciones
- Registre en Realizable en Activo CorrienteDocumento4 páginasRegistre en Realizable en Activo CorrienteAlvaro LGAún no hay calificaciones
- Y Libranos Del SAT AménDocumento190 páginasY Libranos Del SAT AménJose Mauricio Arce QuintanaAún no hay calificaciones
- CierreContableEmpresaOrquideasDocumento3 páginasCierreContableEmpresaOrquideasIngrid Breganza100% (1)
- Analisis Vertical y HorizontalDocumento6 páginasAnalisis Vertical y HorizontalMARIA ALEXANDRA VANEGAS VARGASAún no hay calificaciones
- IMPRESIONES PROYECTO CorregidasDocumento33 páginasIMPRESIONES PROYECTO Corregidasnilfredo13Aún no hay calificaciones
- Libroeee Reto40excel v2015Documento83 páginasLibroeee Reto40excel v2015Anonymous 7shS14100% (2)
- Solucionario - Examen Final Eléctricos IiDocumento11 páginasSolucionario - Examen Final Eléctricos IiFrank BluessAún no hay calificaciones
- Fundamentos Del Método Gráfico para Programación LinealDocumento63 páginasFundamentos Del Método Gráfico para Programación LinealLMH BFCNBLUEAún no hay calificaciones
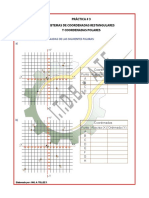
- Practica 3 Coordenadas Rectangulares y Polares PDFDocumento9 páginasPractica 3 Coordenadas Rectangulares y Polares PDFJulio Bravo OscoAún no hay calificaciones
- Laboratorio 3Documento8 páginasLaboratorio 3Juan ReyesAún no hay calificaciones
- Elasticidad y costos de producciónDocumento6 páginasElasticidad y costos de producciónLay HernandezAún no hay calificaciones
- Ejercicios Del Trabajo 13Documento11 páginasEjercicios Del Trabajo 13JIMMY JUNIOR HUAYCAMA CHISTAMAAún no hay calificaciones
- Actividad 7, Fundamentos de MatematicasDocumento10 páginasActividad 7, Fundamentos de MatematicasNïnä Tôvär PâëzAún no hay calificaciones
- Grafica Final PDFDocumento2 páginasGrafica Final PDFCarlos Andres Sambony LedezmaAún no hay calificaciones
- Matemática IIDocumento9 páginasMatemática IIVladimir Garcia100% (1)
- Regresión Lineal TallerDocumento2 páginasRegresión Lineal TallerJ Alexandra Alvarez U50% (4)
- Unidad 2 Sistemas de Ecuaciones LinealesDocumento17 páginasUnidad 2 Sistemas de Ecuaciones Linealesjulia guerreroAún no hay calificaciones
- IUA - Matemática II - AO6 2da ParteDocumento4 páginasIUA - Matemática II - AO6 2da PartegdintinoAún no hay calificaciones
- IUA - Matematica II - AO6 - 1 ParteDocumento1 páginaIUA - Matematica II - AO6 - 1 PartegdintinoAún no hay calificaciones
- IUA - Ingeniería de Sistemas - Matemática II - 2020 - AO5 Parte 1.Documento1 páginaIUA - Ingeniería de Sistemas - Matemática II - 2020 - AO5 Parte 1.gdintinoAún no hay calificaciones
- Autoevaluacion AprobadaDocumento15 páginasAutoevaluacion AprobadagdintinoAún no hay calificaciones
- IUA - Matemática II 2017 - AO5. Parte 2Documento2 páginasIUA - Matemática II 2017 - AO5. Parte 2gdintinoAún no hay calificaciones
- IUA - Matemática II - Actividad Obligatoria 3. Segunda Parte - 2020Documento1 páginaIUA - Matemática II - Actividad Obligatoria 3. Segunda Parte - 2020gdintinoAún no hay calificaciones
- IUA - Matemática I 2019 - AO7 Parte A.Documento1 páginaIUA - Matemática I 2019 - AO7 Parte A.gdintinoAún no hay calificaciones
- IUA - Matemática II - Año 2020 - AO 2 Parte 1 - Gabriel D'IntinoDocumento7 páginasIUA - Matemática II - Año 2020 - AO 2 Parte 1 - Gabriel D'IntinogdintinoAún no hay calificaciones
- Mate2 U2 AutoevaluacionDocumento9 páginasMate2 U2 AutoevaluaciongdintinoAún no hay calificaciones
- Grupos 8 PDFDocumento4 páginasGrupos 8 PDFMiguel de la Rosa GúzmanAún no hay calificaciones
- IUA - Matemática II - Año 2020 - AO 2 Parte 2 - Gabriel D'IntinoDocumento3 páginasIUA - Matemática II - Año 2020 - AO 2 Parte 2 - Gabriel D'IntinogdintinoAún no hay calificaciones
- IUA - Matemática II - Año 2020 - AO 2 Autoevaluación - Gabriel D'IntinoDocumento18 páginasIUA - Matemática II - Año 2020 - AO 2 Autoevaluación - Gabriel D'IntinogdintinoAún no hay calificaciones
- IUA - Matemática I 2019 - AO3Documento5 páginasIUA - Matemática I 2019 - AO3gdintinoAún no hay calificaciones
- IUA - Matemática II 2020 - AO1Documento1 páginaIUA - Matemática II 2020 - AO1gdintinoAún no hay calificaciones
- AO6 - AportesDocumento7 páginasAO6 - AportesgdintinoAún no hay calificaciones
- Grupos, Anillos, Campos PDFDocumento147 páginasGrupos, Anillos, Campos PDFJuan Antonio Gómez AguilarAún no hay calificaciones
- IUA - Matemática I 2019 - AO6 Parte BDocumento1 páginaIUA - Matemática I 2019 - AO6 Parte BgdintinoAún no hay calificaciones
- IUA - Matemática I - 2019 - AO2 Por Gabriel D'IntinoDocumento13 páginasIUA - Matemática I - 2019 - AO2 Por Gabriel D'IntinogdintinoAún no hay calificaciones
- IUA - Matemática I 2019 - AO4Documento6 páginasIUA - Matemática I 2019 - AO4gdintinoAún no hay calificaciones
- IUA - Matemática I 2019 - AO3Documento5 páginasIUA - Matemática I 2019 - AO3gdintinoAún no hay calificaciones
- IUA. Matematica I - 2019. AO 5. Partes DDocumento5 páginasIUA. Matematica I - 2019. AO 5. Partes DgdintinoAún no hay calificaciones
- Diseño de Base de Datos. Unidad 1. Consigna 1.1 - 2018Documento2 páginasDiseño de Base de Datos. Unidad 1. Consigna 1.1 - 2018gdintinoAún no hay calificaciones
- IUA - Matemática I 2019 - AO4Documento6 páginasIUA - Matemática I 2019 - AO4gdintinoAún no hay calificaciones
- IUA - Matemática II 2017 - AO6. Parte 1Documento1 páginaIUA - Matemática II 2017 - AO6. Parte 1gdintinoAún no hay calificaciones
- Diseño de Base de Datos. Unidad 1. Consigna 1.2 - 2018Documento2 páginasDiseño de Base de Datos. Unidad 1. Consigna 1.2 - 2018gdintinoAún no hay calificaciones
- AV Mate 1 Contrato PedagogicoDocumento2 páginasAV Mate 1 Contrato PedagogicogdintinoAún no hay calificaciones
- IUA - Matemática II 2017 - AO5. Parte 2Documento2 páginasIUA - Matemática II 2017 - AO5. Parte 2gdintinoAún no hay calificaciones
- IUA - Matemática II 2017 - AO6. Parte 3Documento13 páginasIUA - Matemática II 2017 - AO6. Parte 3gdintinoAún no hay calificaciones
- IUA - Matemática II 2017 - AO6. Parte 2Documento4 páginasIUA - Matemática II 2017 - AO6. Parte 2gdintinoAún no hay calificaciones
- S1 2022 - 2 PautaDocumento6 páginasS1 2022 - 2 Pautalomejor delalifeAún no hay calificaciones
- Funciones Conv - Conc y Conj ConvDocumento30 páginasFunciones Conv - Conc y Conj ConvEMAFLOR PATRICIA NORIEGA RUIZAún no hay calificaciones
- Derivada DireccionalDocumento31 páginasDerivada DireccionalJeanet QuispeAún no hay calificaciones
- Volumen sólido ecuación zDocumento3 páginasVolumen sólido ecuación zWilbert CMAún no hay calificaciones
- Cálculo de la matriz inversaDocumento3 páginasCálculo de la matriz inversaGabriel Sebastian MontaquizaAún no hay calificaciones
- Programa Algebra y Geometria Analitica 201210Documento5 páginasPrograma Algebra y Geometria Analitica 201210tecnico189Aún no hay calificaciones
- Tema1 3 Traza DeterminanteDocumento21 páginasTema1 3 Traza DeterminanteJOAQUINAún no hay calificaciones
- DescLU40Documento4 páginasDescLU40Danni DominguezAún no hay calificaciones
- Guia - Rectas y PlanosDocumento13 páginasGuia - Rectas y PlanosSteven Hurtado QuilaAún no hay calificaciones
- Consulta - 05 - Sistema de EcuacionesDocumento10 páginasConsulta - 05 - Sistema de EcuacionesAndres ChavezAún no hay calificaciones
- Ejercicios de vectores y matricesDocumento9 páginasEjercicios de vectores y matricesRichard Común PerezAún no hay calificaciones
- Criptografía y álgebra lineal para descifrar mensajesDocumento3 páginasCriptografía y álgebra lineal para descifrar mensajesClaudia VenegasAún no hay calificaciones
- PC 1 Mate 1Documento1 páginaPC 1 Mate 1Sheril TorresAún no hay calificaciones
- 5 Sensibilidad-DualidadDocumento79 páginas5 Sensibilidad-DualidadChristian ChdAún no hay calificaciones
- Calculo TipeosDocumento15 páginasCalculo TipeosFabrizio Alexander Rivas BeltrameAún no hay calificaciones
- 2cap - Diferencial de Funciones Multivariables CRFDocumento34 páginas2cap - Diferencial de Funciones Multivariables CRFJosias Caleb Carhua EspinozaAún no hay calificaciones
- Trabajo de MatricesDocumento6 páginasTrabajo de MatricesAlberthRey100% (2)
- Espacios L2Documento54 páginasEspacios L2leganegAún no hay calificaciones
- Análisis Funcional Miguel SuarezDocumento437 páginasAnálisis Funcional Miguel SuarezBeltran Luis50% (2)
- Determinantes: 2.1) Definición de DeterminantesDocumento15 páginasDeterminantes: 2.1) Definición de DeterminantesYasmin CRAún no hay calificaciones
- Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas y PlanosDocumento15 páginasTarea 2 - Sistemas de Ecuaciones Lineales, Rectas y Planoscarlos robayo100% (2)
- Minimización de Funciones ConvexasDocumento24 páginasMinimización de Funciones ConvexasLR GamboaAún no hay calificaciones
- Cuestionario VectoresDocumento3 páginasCuestionario VectoresGisell Yadhira Mariño ParionaAún no hay calificaciones
- Actividad 1 Calculo de VectoresDocumento5 páginasActividad 1 Calculo de Vectoresluis antonio rosas vargasAún no hay calificaciones
- Transformaciones lineales taller 3Documento3 páginasTransformaciones lineales taller 3Daniela Arango VásquezAún no hay calificaciones
- Tarea 8Documento160 páginasTarea 8Dara NunuraAún no hay calificaciones
- Deber Conjunto IiDocumento7 páginasDeber Conjunto IiBJ SCAún no hay calificaciones
- Textoalglin 15-2 PDFDocumento102 páginasTextoalglin 15-2 PDFCesar Idvorsky Gutiérrez CachiqueAún no hay calificaciones
- 4.8 - Derivada Direccional y GradienteDocumento5 páginas4.8 - Derivada Direccional y GradienteAnonymous hRxjRU7ju100% (3)
- AL Temario de La UNIDADES 1234 y 5Documento4 páginasAL Temario de La UNIDADES 1234 y 5Riqui RiconAún no hay calificaciones