También podría gustarte
- Tarea 8 EngranesDocumento2 páginasTarea 8 EngranesDavid MorenoAún no hay calificaciones
- Proyecto Control de Velocidad de Un Motor de CD Con OperacionalesDocumento21 páginasProyecto Control de Velocidad de Un Motor de CD Con Operacionalesramses zamora ortizAún no hay calificaciones
- Unidad 6 - TrigonometríaDocumento29 páginasUnidad 6 - TrigonometríaF.P.SilvaAún no hay calificaciones
- Actividad 3 - UII - Nava Beltrán JavierDocumento13 páginasActividad 3 - UII - Nava Beltrán Javierjavier navaAún no hay calificaciones
- Aplicación Del Cálculo de La Potencia de Una Bomba de Agua para El Suministro en CasaDocumento13 páginasAplicación Del Cálculo de La Potencia de Una Bomba de Agua para El Suministro en Casaana cifuentesAún no hay calificaciones
- 40 Matriz de Peligros y Riesgos Rev06 - Ductos (Rev 01)Documento4 páginas40 Matriz de Peligros y Riesgos Rev06 - Ductos (Rev 01)David1029Aún no hay calificaciones
- Ejercicios de DeformaciónDocumento23 páginasEjercicios de DeformaciónLucero de la Torre100% (1)
- 12bcs-Mecanismos - Problemas - 2 - 3 Analisis de VelocidadesDocumento10 páginas12bcs-Mecanismos - Problemas - 2 - 3 Analisis de VelocidadesVerónicaMhAún no hay calificaciones
- Introducción Al Cargador 938GDocumento86 páginasIntroducción Al Cargador 938GRene Ramirez Cordova100% (3)
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- ActividadGrupal 2Documento45 páginasActividadGrupal 2Alexander TelloAún no hay calificaciones
- 09.01 Esfuerzos en Pavimentos RígidosDocumento16 páginas09.01 Esfuerzos en Pavimentos RígidosPaola De la Cruz100% (1)
- Zapatas MedianerasDocumento70 páginasZapatas MedianerasIngrid Carolina RODRIGUEZ BONILLA100% (1)
- S2 - Mecanismos PDFDocumento29 páginasS2 - Mecanismos PDFchristianAún no hay calificaciones
- Memoria de Cálculo HidraulicoDocumento12 páginasMemoria de Cálculo HidraulicoCarlos Diaz VeramendiAún no hay calificaciones
- Proyecto Final de DiseñoDocumento45 páginasProyecto Final de DiseñoDavid SanchezAún no hay calificaciones
- Manual Delta 500Documento67 páginasManual Delta 500Osmar Alvites YachachinAún no hay calificaciones
- DiseñoDocumento3 páginasDiseñofes cuautiAún no hay calificaciones
- Catálogo de Las Piezas de Recambio: MDDR / D 250Documento210 páginasCatálogo de Las Piezas de Recambio: MDDR / D 250Gerente Operaciones100% (1)
- Ejercicio 8Documento6 páginasEjercicio 8Joseph CeballosAún no hay calificaciones
- Ejer Cici OsDocumento8 páginasEjer Cici OsREOMAún no hay calificaciones
- Analisis de Mecanismos PlanosDocumento25 páginasAnalisis de Mecanismos PlanosEdwin CaceresAún no hay calificaciones
- Reporte de Tacometro DigitalDocumento10 páginasReporte de Tacometro DigitalEsteban Padilla GonzalezAún no hay calificaciones
- Problema 14.5Documento5 páginasProblema 14.5Miguel Eduardo Pons L.Aún no hay calificaciones
- Unidad 3. Vibraciones 2.0Documento34 páginasUnidad 3. Vibraciones 2.0Gerardo HernándezAún no hay calificaciones
- Ecuación de GrueblerDocumento5 páginasEcuación de GrueblerSvart BegravelseAún no hay calificaciones
- 4Documento2 páginas4Danny Jesse Lingard Pullotasig0% (1)
- Para El Webon de ChiaDocumento6 páginasPara El Webon de ChiaJOSUE MARTIN MEDRANO CHIAAún no hay calificaciones
- Tema 3. LevasDocumento17 páginasTema 3. LevasMarco Antonio Puente CamachoAún no hay calificaciones
- Practica 7Documento9 páginasPractica 7Jonathan Jimenez JardonAún no hay calificaciones
- LevasDocumento4 páginasLevasMaRk LduAún no hay calificaciones
- SOLProblema MP 2 Biela ManivelaDocumento4 páginasSOLProblema MP 2 Biela Manivelafernando4000Aún no hay calificaciones
- Sintesis de MecanismosDocumento29 páginasSintesis de MecanismosFelipe Andrés Cuevas EchegoyenAún no hay calificaciones
- Problemas de Vib Mec 2021 TEMA#1Documento3 páginasProblemas de Vib Mec 2021 TEMA#1FENIX ALAN REGALADO RAMOSAún no hay calificaciones
- ACELERACIÓN Mecanismos Ejercicios 1Documento10 páginasACELERACIÓN Mecanismos Ejercicios 1MauricioAún no hay calificaciones
- 27Documento2 páginas27Misael AguilaAún no hay calificaciones
- Punto Coriolis - PintoDocumento3 páginasPunto Coriolis - PintoJuan Sebastian Morales SierraAún no hay calificaciones
- Introduccià N A Los Mecanismos y A La Cinemã¡ticaDocumento30 páginasIntroduccià N A Los Mecanismos y A La Cinemã¡ticaKaren Granados100% (1)
- Me Can Is Mos TrabajoDocumento7 páginasMe Can Is Mos Trabajojoneth1g.1mostaceroAún no hay calificaciones
- Informe IiDocumento10 páginasInforme IiYoshi TamashiroAún no hay calificaciones
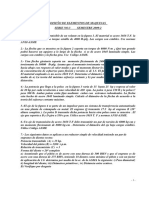
- Problemas de Maquinas ElectricasDocumento5 páginasProblemas de Maquinas ElectricasMiguel AngelAún no hay calificaciones
- LabNo4 Mec Retorno Rapido 15feb2014Documento8 páginasLabNo4 Mec Retorno Rapido 15feb2014JOELAún no hay calificaciones
- Pract. 4 Eln AnalogaDocumento8 páginasPract. 4 Eln AnalogaEmmanuel Lastra WilliamsAún no hay calificaciones
- Ejercicios U-2Documento5 páginasEjercicios U-2Naye PimentelAún no hay calificaciones
- Diseño de Máquinas CAPITULO 12 SOLDADURADocumento32 páginasDiseño de Máquinas CAPITULO 12 SOLDADURAMauricio CarrascoAún no hay calificaciones
- Fluidos IncompresiblesDocumento6 páginasFluidos IncompresiblesVictor ReyesAún no hay calificaciones
- Laboratorio de MecanismosDocumento4 páginasLaboratorio de MecanismosViankaMillion100% (1)
- Practica Calificada #1.docx Calculo 2Documento5 páginasPractica Calificada #1.docx Calculo 2Franck JosueAún no hay calificaciones
- Clase 06 - Dinamica de ParticulasDocumento3 páginasClase 06 - Dinamica de ParticulasKarina AquinoAún no hay calificaciones
- Cuestionario Vibraciones Parcial 2 - Ramirez UstoaDocumento12 páginasCuestionario Vibraciones Parcial 2 - Ramirez Ustoaomar ustoaAún no hay calificaciones
- T1 TrenesDocumento6 páginasT1 TrenesJesus Rodrigo Cordoba LunaAún no hay calificaciones
- Mecanismos RotacionalesDocumento8 páginasMecanismos Rotacionaleszorick sanchezAún no hay calificaciones
- Guia de Trabajo - Mecanismos - Fatiga - DEM103 - Ciclo I - 2022Documento18 páginasGuia de Trabajo - Mecanismos - Fatiga - DEM103 - Ciclo I - 2022David ReyesAún no hay calificaciones
- Guia Laboratorio AT 3008Documento3 páginasGuia Laboratorio AT 3008HernanROsasAún no hay calificaciones
- Preparatorio MDocumento2 páginasPreparatorio MIván EspañaAún no hay calificaciones
- Capitulo 3 ATN 603Documento23 páginasCapitulo 3 ATN 603Callisaya Marca CristianAún no hay calificaciones
- Cap1 Maquinas y Mecanismos Resumen ShigleyDocumento10 páginasCap1 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoAún no hay calificaciones
- Problemas Resueltos MotoresDocumento16 páginasProblemas Resueltos MotoresJoseLopezAún no hay calificaciones
- Electricidad y Electrónica - FASORESDocumento7 páginasElectricidad y Electrónica - FASORESИисус Альфред Кабрера БеррокальAún no hay calificaciones
- 03 Transformacion de Esfuerzos y Carga EstáticaDocumento23 páginas03 Transformacion de Esfuerzos y Carga EstáticaDavid PalaciosAún no hay calificaciones
- Balanceo EstáticoDocumento5 páginasBalanceo EstáticoMiguel GuzmánAún no hay calificaciones
- Tabulación de Centros InstantaneosDocumento50 páginasTabulación de Centros InstantaneosmijachuAún no hay calificaciones
- Vibraciones UiiiDocumento18 páginasVibraciones Uiiimetrickz sanchezAún no hay calificaciones
- Tarea 5 Sesion 5Documento9 páginasTarea 5 Sesion 5Ernesto DiazAún no hay calificaciones
- Ejercicios TrigonometricosDocumento19 páginasEjercicios TrigonometricosJosé Ariel PadillaAún no hay calificaciones
- Problemas1º Bach Vectores ResueltosDocumento7 páginasProblemas1º Bach Vectores ResueltosJorge FranciscoAún no hay calificaciones
- Sistema de InyeccionDocumento2 páginasSistema de InyeccionRonald Steck Hernandez LeytonAún no hay calificaciones
- Formulario Laboratorio UpiicsaDocumento2 páginasFormulario Laboratorio UpiicsaLili MejiaAún no hay calificaciones
- Guia 5 Disposición de Los CilindrosDocumento14 páginasGuia 5 Disposición de Los CilindrosCharles Rodriguez MarinAún no hay calificaciones
- Lectura Capitulo 07Documento14 páginasLectura Capitulo 07Alonso Salazar NuñuveroAún no hay calificaciones
- Uniones Conectadas y SoldadasDocumento9 páginasUniones Conectadas y SoldadasLisandry Gutierrez100% (1)
- ANEXO 01 - Cronograma de Trabajo TIE - IN-001Documento1 páginaANEXO 01 - Cronograma de Trabajo TIE - IN-001jeanAún no hay calificaciones
- Trabajo - Monografico - Columnas y Vigas - Estructuras de AceroDocumento27 páginasTrabajo - Monografico - Columnas y Vigas - Estructuras de AceroDany Jhoni Delgadillo HuaranccaAún no hay calificaciones
- Practica DinamicaDocumento13 páginasPractica DinamicaGonzalo RodriguezAún no hay calificaciones
- 12-Diseño de Vigas IDocumento33 páginas12-Diseño de Vigas IFernandoMonteroOyarceAún no hay calificaciones
- Diapos de ElectricidadDocumento18 páginasDiapos de ElectricidadALESSKA JESSY ANDRES MERMAAún no hay calificaciones
- Engranaje PlanetarioDocumento5 páginasEngranaje PlanetarioJose Franco Martinez ValladolidAún no hay calificaciones
- Práctica 3Documento5 páginasPráctica 3Cristian RequemeAún no hay calificaciones
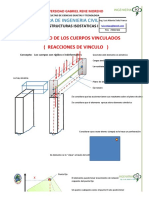
- Reacciones de VinculoDocumento18 páginasReacciones de VinculoAlejandro Rodriguez RodriguezAún no hay calificaciones
- Memoria de CalculoDocumento93 páginasMemoria de CalculoJavier RuedaAún no hay calificaciones
- VelocidadDocumento52 páginasVelocidadAdrian ZuñigaAún no hay calificaciones
- Los ImanesDocumento3 páginasLos ImanesRaúl LuqueAún no hay calificaciones
- Prueba Teorica ConductoresDocumento14 páginasPrueba Teorica ConductoresJuan CapachoAún no hay calificaciones
- Guia Fenomenos I Tema 1Documento2 páginasGuia Fenomenos I Tema 1raposhitaAún no hay calificaciones
- Ejercicios ResueltosDocumento14 páginasEjercicios ResueltosVN CT SGRAún no hay calificaciones
- Barras Redondas CalibradasDocumento2 páginasBarras Redondas CalibradasAlfredo Oro vidalAún no hay calificaciones
- Tipos de Bombas PDFDocumento14 páginasTipos de Bombas PDFAlondra Molina peñaAún no hay calificaciones