También podría gustarte
- BAMBUCOSDocumento55 páginasBAMBUCOSLimbo Rosso100% (2)
- Auxiliares para La MarchaDocumento30 páginasAuxiliares para La MarchaArnold DragneelAún no hay calificaciones
- EVALUACION POSTURAL..... - Compressed PDFDocumento25 páginasEVALUACION POSTURAL..... - Compressed PDFDaniela Luque100% (1)
- Resumen de Ortesis y ProtesisDocumento148 páginasResumen de Ortesis y ProtesisAylen PedrasaAún no hay calificaciones
- Acapella ChoiceDocumento3 páginasAcapella Choicejuanito1979Aún no hay calificaciones
- 07 Programas APSDocumento32 páginas07 Programas APSdavid8626Aún no hay calificaciones
- Posiciones AnatomicasDocumento27 páginasPosiciones AnatomicasJohannaPolo100% (2)
- Programas de CasaDocumento13 páginasProgramas de CasaBETTYAún no hay calificaciones
- Barreras ArquitectonicasDocumento41 páginasBarreras ArquitectonicasYngri BravoAún no hay calificaciones
- Posiciones Del PacienteDocumento5 páginasPosiciones Del PacienteTEREAún no hay calificaciones
- Musculos Miembro SuperiorDocumento11 páginasMusculos Miembro SuperioranaAún no hay calificaciones
- Muleta Baston y AndadorDocumento16 páginasMuleta Baston y AndadorKatherine HernandezAún no hay calificaciones
- Geodesia Geometrica IDocumento93 páginasGeodesia Geometrica IJuan PabloAún no hay calificaciones
- Actitud Postural y DolorDocumento21 páginasActitud Postural y DolorVane IlbayAún no hay calificaciones
- Fisioterapeuta en El EmbarazoDocumento13 páginasFisioterapeuta en El EmbarazoCarlos Luis Hernandez RamosAún no hay calificaciones
- Exámenes de Geologia EstructuralDocumento15 páginasExámenes de Geologia EstructuralRay Kolard Huerta Sotelo50% (2)
- Métodos de Exploración GeológicaDocumento21 páginasMétodos de Exploración Geológicaarlequintensor100% (2)
- Mapa ConceptualDocumento3 páginasMapa Conceptualana cervantes0% (1)
- Art Quemadura Fisioterapia PDFDocumento10 páginasArt Quemadura Fisioterapia PDFSlovan OchoaAún no hay calificaciones
- Ejercicios Coordinacion, Marcha, Equilibrio 1Documento2 páginasEjercicios Coordinacion, Marcha, Equilibrio 1Ximena Sanchez100% (1)
- Andadores Vi SemestreDocumento21 páginasAndadores Vi SemestreLuis Angel Bernales VargasAún no hay calificaciones
- Terapia Física y Ocupacional Escoliosis FDocumento13 páginasTerapia Física y Ocupacional Escoliosis FClaudiaRosioOrellanaDuarteAún no hay calificaciones
- Marcha Equina Expo TerminadoDocumento22 páginasMarcha Equina Expo TerminadoKevin RojasAún no hay calificaciones
- Linea Del TiempoDocumento1 páginaLinea Del TiempoKarely Dayana Castillo EstudilloAún no hay calificaciones
- POSICIONES DE PACIENTES M.MDocumento3 páginasPOSICIONES DE PACIENTES M.MAnonymous 7MbQoo5oQAún no hay calificaciones
- Laminas Método BrumnstonDocumento6 páginasLaminas Método BrumnstonJOYSBELL CEBALLOSAún no hay calificaciones
- Presentacion de Metodo Bobath PDFDocumento93 páginasPresentacion de Metodo Bobath PDFAntonia Guzmán LiconaAún no hay calificaciones
- 02 Definiciones y Terminologia en El Concepto BobathDocumento27 páginas02 Definiciones y Terminologia en El Concepto BobathFabi FuentesAún no hay calificaciones
- Auxiliares de Marha A2Documento7 páginasAuxiliares de Marha A2Almä GómezAún no hay calificaciones
- Actitud PosturalDocumento25 páginasActitud PosturalNoris GonzálezAún no hay calificaciones
- Formato Evaluacion FT 21 Sep 2021Documento32 páginasFormato Evaluacion FT 21 Sep 2021Laura Sofia GarzonAún no hay calificaciones
- Ex PosicionDocumento39 páginasEx PosicionJenii SantOsAún no hay calificaciones
- Posiciones Anatomicas Del PacienteDocumento20 páginasPosiciones Anatomicas Del PacienteEsteban RojasAún no hay calificaciones
- Dispositivos Ortopedicos DorsolumbaresDocumento38 páginasDispositivos Ortopedicos DorsolumbaresCarol RodríguezAún no hay calificaciones
- Cambio Del Paciente de Cama A CamillaDocumento17 páginasCambio Del Paciente de Cama A CamillaAndrés Morales100% (1)
- Lesiones de TroncoDocumento31 páginasLesiones de TroncoXubane Telleria HuegunAún no hay calificaciones
- Glosario Terminos HidroterapiaDocumento3 páginasGlosario Terminos Hidroterapiakatherinne GómezAún no hay calificaciones
- Informe de Trauma Esguince de Tobillo e InestabiliadadDocumento9 páginasInforme de Trauma Esguince de Tobillo e InestabiliadadPauli Sobarzo-VegaAún no hay calificaciones
- AditamentosDocumento16 páginasAditamentosDiana SanabriaAún no hay calificaciones
- Facilitación de Las Actividades de La Vida Diaria Utilizando El Método BobathDocumento22 páginasFacilitación de Las Actividades de La Vida Diaria Utilizando El Método BobathSofia MenaAún no hay calificaciones
- Movimientos Principales de Las ArticulacionesDocumento2 páginasMovimientos Principales de Las ArticulacionesjhousmaryAún no hay calificaciones
- Necesidades de Movimiento y Ejercicio (Autoguardado)Documento10 páginasNecesidades de Movimiento y Ejercicio (Autoguardado)Tzoc ElyAún no hay calificaciones
- Dispareunia Femenina Dolor Durante La Relacion Sexual 5625 LNHSWV PDFDocumento3 páginasDispareunia Femenina Dolor Durante La Relacion Sexual 5625 LNHSWV PDFHenry Reyes GutierrezAún no hay calificaciones
- Anatomía Descriptiva Sacro & CóccixDocumento38 páginasAnatomía Descriptiva Sacro & CóccixLauraPatriciaAún no hay calificaciones
- EsferodinamiaDocumento34 páginasEsferodinamiaNoris GonzálezAún no hay calificaciones
- Cuestionario Higiene PosturalDocumento5 páginasCuestionario Higiene PosturalOmaira Meneses0% (1)
- Historia Clínica - AmbulatorioDocumento15 páginasHistoria Clínica - Ambulatoriosaira milena ardila avendaño100% (1)
- Movilización Del Paciente Hacia Un Lateral de La CamaDocumento4 páginasMovilización Del Paciente Hacia Un Lateral de La Camachristian mosai yañez vazquezAún no hay calificaciones
- COMOMESIENTODocumento5 páginasCOMOMESIENTOVicente GarciaAún no hay calificaciones
- Caso Clinico FinalDocumento19 páginasCaso Clinico FinalMARIA FERNANDA PINILLA VEGAAún no hay calificaciones
- Tecnicas de Permeabilización de Las Vías AéreasDocumento24 páginasTecnicas de Permeabilización de Las Vías AéreasAlejandro José Lucambio de AbreuAún no hay calificaciones
- Método Jsi "Job Strain Index"Documento20 páginasMétodo Jsi "Job Strain Index"BrigittAún no hay calificaciones
- Desarticulacion de Cadera..201Documento75 páginasDesarticulacion de Cadera..201Rocio Marisol MtzAún no hay calificaciones
- Guia Práctica Clínica de Diagnóstico y Tratamiento de Síndrome de Dismovilidad en El Adulto MayorDocumento44 páginasGuia Práctica Clínica de Diagnóstico y Tratamiento de Síndrome de Dismovilidad en El Adulto MayorKriss Ruiz RoncalAún no hay calificaciones
- Monografia de Chequeo Prótesico ZeidaDocumento19 páginasMonografia de Chequeo Prótesico ZeidaGatito Gatito GatunoAún no hay calificaciones
- Watsu e Aquadinamic2Documento55 páginasWatsu e Aquadinamic2Kevin Daniel Pasos RivasAún no hay calificaciones
- Evaluacion de Columna VertebralDocumento22 páginasEvaluacion de Columna VertebralDiego AcuñaAún no hay calificaciones
- Musculos Del Torax y TroncoDocumento47 páginasMusculos Del Torax y TroncoPercyAlexanderAún no hay calificaciones
- Bobath Manejo NiñosDocumento25 páginasBobath Manejo NiñosMaria Del Mar Marulanda Grizales100% (2)
- Neurofacilitacion Propioceptiva EscápulaDocumento19 páginasNeurofacilitacion Propioceptiva EscápulaPepi Barajas Arias100% (1)
- Oblicuidad Pélvica Congénica (Opc)Documento14 páginasOblicuidad Pélvica Congénica (Opc)Rodrigo GuzmánAún no hay calificaciones
- US TerapéuticoDocumento23 páginasUS TerapéuticoCamilaCampañaSalcedoAún no hay calificaciones
- Sem N 03 Planos y Ejes de MovimientoDocumento25 páginasSem N 03 Planos y Ejes de Movimientodiana ignacio rojasAún no hay calificaciones
- Organización Del Cuerpo Humano: Lic T.M Yelka Tatiana Benavente UgarteDocumento24 páginasOrganización Del Cuerpo Humano: Lic T.M Yelka Tatiana Benavente UgarteKaren HalanocaAún no hay calificaciones
- Capitulo1-Una Mirada A La VidaDocumento18 páginasCapitulo1-Una Mirada A La VidaCamila Castillo DominguezAún no hay calificaciones
- Condor UnionDocumento43 páginasCondor UnionmoninacantilloAún no hay calificaciones
- EjerciciosDocumento37 páginasEjerciciosCarola QAún no hay calificaciones
- Organografia VegetalDocumento8 páginasOrganografia VegetalChristian Soto JaraAún no hay calificaciones
- Pensamiento ComplejoDocumento38 páginasPensamiento ComplejojofrehAún no hay calificaciones
- Trabajo Escrito de TegumentarioDocumento2 páginasTrabajo Escrito de TegumentarioiltzelgarciaAún no hay calificaciones
- Resolución 227 de 2006Documento18 páginasResolución 227 de 2006Andres Guerrero100% (1)
- Tesis Pregrado Romero Q02 R654 TDocumento132 páginasTesis Pregrado Romero Q02 R654 TAstrid Carolina Calle Arones0% (1)
- Estructura y Funciones Del Sistema BiomecanicoDocumento53 páginasEstructura y Funciones Del Sistema BiomecanicoDavid Avedoy100% (3)
- Informe Proyecto FODECYT 02-2010Documento579 páginasInforme Proyecto FODECYT 02-2010José Daniel JocopAún no hay calificaciones
- Relacion de Estudiantes Participantes en El Primer Día Del Logro - 2023Documento1 páginaRelacion de Estudiantes Participantes en El Primer Día Del Logro - 2023Tomas BENDITAAún no hay calificaciones
- TRIPTICODocumento2 páginasTRIPTICOCleydu Diaz Cantante100% (1)
- ApicacionDocumento1 páginaApicacionFranklin VasquezAún no hay calificaciones
- Parala JeDocumento7 páginasParala JeMijaiel Andy Mendoza AguilarAún no hay calificaciones
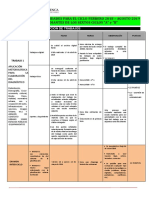
- CRONOGRAMA 6° CICLO URBANISMO II Mar - Ago 2019 PDFDocumento14 páginasCRONOGRAMA 6° CICLO URBANISMO II Mar - Ago 2019 PDFcarlosAún no hay calificaciones
- Signos de Puntuación.Documento5 páginasSignos de Puntuación.Jhosylees BritoAún no hay calificaciones
- Biomas de HuancavelicaDocumento2 páginasBiomas de HuancavelicaJosé ÁlvarezAún no hay calificaciones
- FisiologiaDocumento14 páginasFisiologiaSilvana Bicerra RodriguezAún no hay calificaciones
- Informe Lab2Documento12 páginasInforme Lab2Mateo AmadoAún no hay calificaciones
- 1 Tipos de Suelos en GeotecniaDocumento27 páginas1 Tipos de Suelos en GeotecniaJoel Miranda Cajahuanca100% (1)
- Tecnologia de GruposDocumento11 páginasTecnologia de GruposAisha ArmendarizAún no hay calificaciones
- Micorrizas CIAT PDFDocumento121 páginasMicorrizas CIAT PDFNelver Moreno0% (1)
- Seres VivosDocumento10 páginasSeres VivosGraciela MolinaAún no hay calificaciones
- El Lenguaje Es La Capacidad de Comunicacion A Travez de Signos y Simbolos Desarrollaro Por El Ser Humano para La Comunicación Con Los de Nuestra Misma EspecieDocumento2 páginasEl Lenguaje Es La Capacidad de Comunicacion A Travez de Signos y Simbolos Desarrollaro Por El Ser Humano para La Comunicación Con Los de Nuestra Misma EspecieMabel AnahiAún no hay calificaciones
- Agua Por Todas PartesDocumento14 páginasAgua Por Todas PartesGianpierre Obregón DelzoAún no hay calificaciones
- Acertijos Matematicos IDocumento50 páginasAcertijos Matematicos ISergio CorralAún no hay calificaciones