También podría gustarte
- El Método de CrossDocumento6 páginasEl Método de CrossDaniel VSAún no hay calificaciones
- Método Cross vigas continúasDocumento5 páginasMétodo Cross vigas continúasJuan HuertaAún no hay calificaciones
- Metodo de La Rigidez en Estructuras InclinadasDocumento6 páginasMetodo de La Rigidez en Estructuras Inclinadaslarry01_05Aún no hay calificaciones
- Vigas ContinuasDocumento9 páginasVigas ContinuassaraiAún no hay calificaciones
- Proyecto de Analisis EstructuralDocumento19 páginasProyecto de Analisis EstructuralAlex BanderaAún no hay calificaciones
- Elementos Sujetos A CompresionDocumento48 páginasElementos Sujetos A CompresionEduardo Jimenez HernandezAún no hay calificaciones
- Diseño de elementos de acero a flexión compresiónDocumento8 páginasDiseño de elementos de acero a flexión compresiónFernando AguilarAún no hay calificaciones
- FG O ICIV-2010-208 Analisis Estructural PDFDocumento10 páginasFG O ICIV-2010-208 Analisis Estructural PDFAngri JegaAún no hay calificaciones
- Usos y desarrollo de los pilotes a través de la historiaDocumento7 páginasUsos y desarrollo de los pilotes a través de la historiaJimmy Cruz RazAún no hay calificaciones
- El origen de los sismos: Teorías y descubrimientos claveDocumento24 páginasEl origen de los sismos: Teorías y descubrimientos claveFrancisco TelloAún no hay calificaciones
- UTM-Método Deformaciones Sistemas HiperestáticosDocumento5 páginasUTM-Método Deformaciones Sistemas HiperestáticosLuis G. ErazoAún no hay calificaciones
- Comparacion Entre Rigidez y FlexibilidadDocumento18 páginasComparacion Entre Rigidez y FlexibilidadAlejandra Briones MartinezAún no hay calificaciones
- Marcos ContraventeadosDocumento5 páginasMarcos ContraventeadosKevin Mercado CastilloAún no hay calificaciones
- Ductilidad de Elementos EstructuralesDocumento2 páginasDuctilidad de Elementos EstructuralesGuersy VeraAún no hay calificaciones
- Diferencias entre sistemas sanitario y pluvialDocumento13 páginasDiferencias entre sistemas sanitario y pluvialDiana LeonAún no hay calificaciones
- Capitulo 11 Condensacion Estatica Matricial PDFDocumento12 páginasCapitulo 11 Condensacion Estatica Matricial PDFKaren Esther Acuña VelasquezAún no hay calificaciones
- Sistemas de 1GDL (SDOF)Documento31 páginasSistemas de 1GDL (SDOF)luis molinaAún no hay calificaciones
- Método de Cross Distribución de Momentos IntroducciónDocumento13 páginasMétodo de Cross Distribución de Momentos IntroducciónBrayan Jaramillo LamadridAún no hay calificaciones
- Definición de Armadura PlanaDocumento3 páginasDefinición de Armadura PlanaGabriela E. Mendoza LunaAún no hay calificaciones
- Método de Deflexión de PendienteDocumento11 páginasMétodo de Deflexión de PendienteDavid Torres MejiaAún no hay calificaciones
- Abastecimiento aguaDocumento13 páginasAbastecimiento aguacarlos santiago de los santosAún no hay calificaciones
- Trabajo Final de EstaticaDocumento153 páginasTrabajo Final de EstaticaAlex Aratia100% (1)
- ALMANAQUE DE PARED 2021 Opción 2Documento1 páginaALMANAQUE DE PARED 2021 Opción 2Cleverts Enrique Dolores Lúcar100% (1)
- Software Calculo de Analisis EstructuralDocumento2 páginasSoftware Calculo de Analisis EstructuralSplinter Spacey0% (1)
- Fallas en Cimentaciones Superficiales Expo Final de FinalesDocumento42 páginasFallas en Cimentaciones Superficiales Expo Final de FinalesJohn Guerrero NavarroAún no hay calificaciones
- 4.6 Acero de RefuerzoDocumento2 páginas4.6 Acero de RefuerzoJuan Carlos Moreno VelasquezAún no hay calificaciones
- Norma Sismoresistente-Analisis EstaticoDocumento61 páginasNorma Sismoresistente-Analisis EstaticoAlexander Madariaga DueñasAún no hay calificaciones
- Proyecto de Sistemas HiperestaticoDocumento12 páginasProyecto de Sistemas HiperestaticoStalin MoreiraAún no hay calificaciones
- Hierros en ZapatasDocumento13 páginasHierros en ZapatasJavier CañizaresAún no hay calificaciones
- Matriz de rigidez de elementos estructuralesDocumento18 páginasMatriz de rigidez de elementos estructuralesRuben Machaca PerezAún no hay calificaciones
- Teoría placas láminasDocumento5 páginasTeoría placas láminasromeo santos garciaAún no hay calificaciones
- Vientos Ingenieria MaritimaDocumento12 páginasVientos Ingenieria MaritimaBrayan GarciaAún no hay calificaciones
- Mètodo de Distribuciòn de MomentosDocumento36 páginasMètodo de Distribuciòn de MomentosMIGUEL ANGEL ALARCON CRUZAún no hay calificaciones
- Métodos EnergéticosDocumento10 páginasMétodos EnergéticoseduardoAún no hay calificaciones
- DISEÑO EN ACERO ExamenDocumento6 páginasDISEÑO EN ACERO ExamenErwin Lopez CasaverdeAún no hay calificaciones
- Hidráulica IDocumento3 páginasHidráulica IJosé Chacón AmezcuaAún no hay calificaciones
- Método de CrossDocumento12 páginasMétodo de CrossDiana Benitez100% (1)
- Dinámica EstructuralDocumento3 páginasDinámica EstructuralJosé Luis LAún no hay calificaciones
- La Torsión en Vigas en Elementos de Hormigón ArmadoDocumento4 páginasLa Torsión en Vigas en Elementos de Hormigón ArmadoanthonysmaelAún no hay calificaciones
- Conceptos Básicos de Análisis Estructural-1Documento12 páginasConceptos Básicos de Análisis Estructural-1Wilson PanchanaAún no hay calificaciones
- ColumnasDocumento21 páginasColumnasGre TovarAún no hay calificaciones
- Matriz Rigidez Muros EstructuralesDocumento11 páginasMatriz Rigidez Muros EstructuralesGianina Arteaga Angulo100% (1)
- Tema 1 Conceptos GeneralesDocumento7 páginasTema 1 Conceptos GeneralesRoberto Ramos100% (1)
- Em U5 T1 - E1Documento33 páginasEm U5 T1 - E1SANTAún no hay calificaciones
- Diseño de Elementos A Tension y Compresion de Una Armadura Con Uniones AtornilladasDocumento20 páginasDiseño de Elementos A Tension y Compresion de Una Armadura Con Uniones AtornilladasAlvaro Ortiz VillagomezAún no hay calificaciones
- Rafael Notario Lopez - Analisis Sismico y EolicoDocumento15 páginasRafael Notario Lopez - Analisis Sismico y EolicoRafael Notario LopezAún no hay calificaciones
- AtaguiaDocumento18 páginasAtaguiaCristhian Josue Vilca CAún no hay calificaciones
- Análisis estructural avanzado MDFDocumento3 páginasAnálisis estructural avanzado MDFluisAún no hay calificaciones
- Ensayo-Método de Cross para Marcos Sin Desplazamiento LateralDocumento7 páginasEnsayo-Método de Cross para Marcos Sin Desplazamiento LateralOwen AvitiaAún no hay calificaciones
- Método de la pendiente-deflexión para el análisis de vigas continuas y marcosDocumento8 páginasMétodo de la pendiente-deflexión para el análisis de vigas continuas y marcosEdithAún no hay calificaciones
- Metodo de CrossDocumento10 páginasMetodo de CrossJoaquín Arturo Gavilan Condori100% (1)
- Método de Cross para Marcos Sin Desplazamiento LateralDocumento4 páginasMétodo de Cross para Marcos Sin Desplazamiento LateralBryanTaipe100% (1)
- Barra A FlexiónDocumento11 páginasBarra A FlexiónMiguel CardenasAún no hay calificaciones
- Método de Cross para Vigas Continuas (Conceptos)Documento4 páginasMétodo de Cross para Vigas Continuas (Conceptos)Frida Marthen Velazquez100% (1)
- Método de Cross iterativoDocumento24 páginasMétodo de Cross iterativoandcolon50% (2)
- APUNTES Tema 2 (2021) ModDocumento11 páginasAPUNTES Tema 2 (2021) ModTeiAún no hay calificaciones
- Deformacion en Vigas RM ExpoDocumento3 páginasDeformacion en Vigas RM ExpoJhonAlexAún no hay calificaciones
- Presupuestoclienteresumen AraDocumento1 páginaPresupuestoclienteresumen Aramarcelo aza nuñezAún no hay calificaciones
- 19 DAB 1010 2HP4 1525rpm (220 380 440 3) 4048Documento2 páginas19 DAB 1010 2HP4 1525rpm (220 380 440 3) 4048marcelo aza nuñezAún no hay calificaciones
- Calculo Mecanico de EstructurasDocumento1 páginaCalculo Mecanico de Estructurasmarcelo aza nuñezAún no hay calificaciones
- Control 1F83C-11PR Emerson - A0317Documento2 páginasControl 1F83C-11PR Emerson - A0317luis requejoAún no hay calificaciones
- Resumen de MaterialesDocumento3 páginasResumen de Materialesmarcelo aza nuñezAún no hay calificaciones
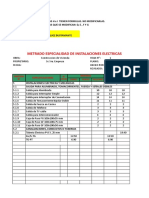
- Planilla de Metrados de La Especialidad de Instalaciones EléctricasDocumento6 páginasPlanilla de Metrados de La Especialidad de Instalaciones EléctricasAguirre Gonzales ManuelAún no hay calificaciones
- Informe SituacionalDocumento1 páginaInforme Situacionalmarcelo aza nuñezAún no hay calificaciones
- Estudio Dirigido Historia Geografia PrimeroDocumento1 páginaEstudio Dirigido Historia Geografia Primeromarcelo aza nuñezAún no hay calificaciones
- ECONOMIA-SECTOR PUBLICO Lu XDDocumento40 páginasECONOMIA-SECTOR PUBLICO Lu XDmarcelo aza nuñezAún no hay calificaciones
- PLANTILLA2Documento1 páginaPLANTILLA2marcelo aza nuñezAún no hay calificaciones
- Sistema Bancario Ing CivilDocumento17 páginasSistema Bancario Ing Civilmarcelo aza nuñezAún no hay calificaciones
- Sistema Bancario Ing CivilDocumento17 páginasSistema Bancario Ing Civilmarcelo aza nuñezAún no hay calificaciones
- Clase 5 Analisis de Consistencia y Homogeneidad de DatosDocumento9 páginasClase 5 Analisis de Consistencia y Homogeneidad de Datosmarcelo aza nuñezAún no hay calificaciones
- Clase 5 Analisis de Consistencia y Homogeneidad de DatosDocumento10 páginasClase 5 Analisis de Consistencia y Homogeneidad de DatosCinthia OscoAún no hay calificaciones
- PLANTILLA2Documento1 páginaPLANTILLA2marcelo aza nuñezAún no hay calificaciones
- ArchivoDocumento3 páginasArchivomarcelo aza nuñezAún no hay calificaciones
- Plan de Practicas OleohidraulicaDocumento2 páginasPlan de Practicas Oleohidraulicamarcelo aza nuñezAún no hay calificaciones
- Mapa Ilo PDFDocumento1 páginaMapa Ilo PDFmarcelo aza nuñezAún no hay calificaciones
- 01 Aspectos Generales PDFDocumento20 páginas01 Aspectos Generales PDFMary FloresAún no hay calificaciones
- Protocolo Presentacion ExpedientesDocumento31 páginasProtocolo Presentacion ExpedientesRUTH LILI MALPARTIDA VELASQUEZAún no hay calificaciones
- Registro estudiantes curso transmisionDocumento8 páginasRegistro estudiantes curso transmisionmarcelo aza nuñezAún no hay calificaciones
- 02 Expo Caminos I UJCMDocumento23 páginas02 Expo Caminos I UJCMAlan Pablo HuimanAún no hay calificaciones
- Tema Magnetismo12 PDFDocumento48 páginasTema Magnetismo12 PDFmarcelo aza nuñezAún no hay calificaciones
- 02 Expo Caminos I UJCMDocumento23 páginas02 Expo Caminos I UJCMAlan Pablo HuimanAún no hay calificaciones
- Universidad José Carlos MariáteguiDocumento7 páginasUniversidad José Carlos MariáteguiMarcelo Aza NuñezAún no hay calificaciones
- Universidad José Carlos MariáteguiDocumento12 páginasUniversidad José Carlos Mariáteguimarcelo aza nuñezAún no hay calificaciones
- Universidad José Carlos MariáteguiDocumento7 páginasUniversidad José Carlos MariáteguiMarcelo Aza NuñezAún no hay calificaciones
- El Canon de La Novela Negra y PoliciacaDocumento17 páginasEl Canon de La Novela Negra y PoliciacaFranco Lurge Magnolfi100% (1)
- Capitulo V-Libro BlancoDocumento9 páginasCapitulo V-Libro Blancommorales53Aún no hay calificaciones
- Tasación de Un TerrenoDocumento13 páginasTasación de Un TerrenoJ Dani Claro100% (1)
- Obsolecencia ProgramadaDocumento5 páginasObsolecencia ProgramadaJhonny A. Bolaños PinedaAún no hay calificaciones
- Informe PLCDocumento5 páginasInforme PLCadry.mary183Aún no hay calificaciones
- TP 1 Emplazamiento AzucareroDocumento22 páginasTP 1 Emplazamiento AzucareroMaxi Salas Correa LopezAún no hay calificaciones
- Aletarios C++Documento20 páginasAletarios C++Jean Paul Romero LobatonAún no hay calificaciones
- Montaje de Una Red BasicaDocumento14 páginasMontaje de Una Red BasicaTeoBAAún no hay calificaciones
- HW6 D1 FallaEstáticaDocumento4 páginasHW6 D1 FallaEstáticaJonathan Lainez del PezoAún no hay calificaciones
- Pines y Esquema de SUZUKI ECU de DENSO 33920 y Version LatinoamericaDocumento10 páginasPines y Esquema de SUZUKI ECU de DENSO 33920 y Version LatinoamericaYuri ChoquehuancaAún no hay calificaciones
- Determinación de Proteína Bruta por Método KjeldahlDocumento39 páginasDeterminación de Proteína Bruta por Método KjeldahlOrlando MandujanoAún no hay calificaciones
- Definicion Normas ACEA Motor Liviano PDFDocumento1 páginaDefinicion Normas ACEA Motor Liviano PDFlark_Aún no hay calificaciones
- 2-Densidad, Peso Especifico, Cohesión, Factores de ConversiónDocumento26 páginas2-Densidad, Peso Especifico, Cohesión, Factores de ConversiónAntonio Alexander Sanchez ArroyoAún no hay calificaciones
- Oxylog 3000 - Presentacion 1Documento33 páginasOxylog 3000 - Presentacion 1eduardoAún no hay calificaciones
- Nom-001-Scfi-2018 10 Peligro de Choque en Condiciones Normales de FuncionamientoDocumento7 páginasNom-001-Scfi-2018 10 Peligro de Choque en Condiciones Normales de FuncionamientoAriel Amaro BeatrizAún no hay calificaciones
- Comentarios Al Titulo HDocumento0 páginasComentarios Al Titulo Hrichardcantillo02Aún no hay calificaciones
- Presentacion RankingDocumento35 páginasPresentacion RankingDaniella MorelosAún no hay calificaciones
- Guía Básica de Utlización de PROIIDocumento60 páginasGuía Básica de Utlización de PROIIJuanCarlosCheca100% (2)
- Ucontrol Revista 0001Documento53 páginasUcontrol Revista 0001mirkovsAún no hay calificaciones
- Practica 01 PDFDocumento32 páginasPractica 01 PDFJinm BravoAún no hay calificaciones
- Problemas de Conservación de La EnergíaDocumento2 páginasProblemas de Conservación de La EnergíaMamoun BentalebAún no hay calificaciones
- Manual Mantenimiento Camion Minero 797b CaterpillarDocumento64 páginasManual Mantenimiento Camion Minero 797b CaterpillarManuel Sd62% (13)
- Aplicaciones de Los AlquenosDocumento2 páginasAplicaciones de Los AlquenosClau GrcAún no hay calificaciones
- Bitcoin para ProgramadoresDocumento89 páginasBitcoin para ProgramadoresEllen Carvalho100% (1)
- Plan de Seguridad Operacional AerocaliDocumento155 páginasPlan de Seguridad Operacional AerocaliIng Camilo TomannAún no hay calificaciones
- Qué Es Ingeniería MilitarDocumento3 páginasQué Es Ingeniería MilitarJoel MarcanoAún no hay calificaciones
- Practica Académica - Seguidor SolarDocumento31 páginasPractica Académica - Seguidor SolarSergio De Los ReyesAún no hay calificaciones
- Nivelación TopográficaDocumento10 páginasNivelación TopográficaJeffersonAún no hay calificaciones
- Proceso Declarativo CemexDocumento116 páginasProceso Declarativo CemexLaura ForeroAún no hay calificaciones
- Ingenieria Civil en Obras CivilesDocumento11 páginasIngenieria Civil en Obras CivilesSilvia Chimbolema100% (2)
- Nomenclatura sistemática y tradicional de compuestos químicosDocumento2 páginasNomenclatura sistemática y tradicional de compuestos químicosEsveidy Clemente GonzálezAún no hay calificaciones