También podría gustarte
- 3 4 ParabolaDocumento13 páginas3 4 ParabolaChristian Vasquez RodriguezAún no hay calificaciones
- Determinacion de La Direccion Focal de Una LenteDocumento7 páginasDeterminacion de La Direccion Focal de Una LenteRENZO DYLAN FABRIZIO RONCAL BUENOAún no hay calificaciones
- Proyecciones en OpenGLDocumento14 páginasProyecciones en OpenGLVerónica MendozaAún no hay calificaciones
- Reporte de Laboratorio de Fisica D (Formación de Imagenes Por Espejos y Lentes Delgadas)Documento10 páginasReporte de Laboratorio de Fisica D (Formación de Imagenes Por Espejos y Lentes Delgadas)Carlos Alberto0% (1)
- Previo 2 - Computacion GraficaDocumento3 páginasPrevio 2 - Computacion GraficaCruz100% (1)
- Presentacion Reconstrucción 3DDocumento47 páginasPresentacion Reconstrucción 3Dserrano5510Aún no hay calificaciones
- Practica 5-Lab Fisica IVDocumento7 páginasPractica 5-Lab Fisica IVAbrahamAún no hay calificaciones
- Lab. Fisica IV Practica 5Documento18 páginasLab. Fisica IV Practica 5Marco PulidoAún no hay calificaciones
- PRACTICA 1 Vision EstereoscopicaDocumento12 páginasPRACTICA 1 Vision EstereoscopicaHeiner OrtegaAún no hay calificaciones
- Lab de EspejosDocumento11 páginasLab de EspejosZeld BarrientosAún no hay calificaciones
- Poligonal CerradaDocumento14 páginasPoligonal CerradaTrujillofa88% (8)
- S11.s1-Puntos de Control en FotogrametriaDocumento22 páginasS11.s1-Puntos de Control en FotogrametriaStay BeAún no hay calificaciones
- P5 F4 2048039 PajcDocumento6 páginasP5 F4 2048039 PajcPatricio JimenezAún no hay calificaciones
- Diferentes EdicionesDocumento25 páginasDiferentes EdicionesLuis Angel Garay CamachoAún no hay calificaciones
- Practica 5 Lab de FisicaDocumento5 páginasPractica 5 Lab de FisicaErick Lazcano DorantesAún no hay calificaciones
- Visión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraDe EverandVisión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraAún no hay calificaciones
- Algebra Tema 4Documento89 páginasAlgebra Tema 4María José Mejía JiménezAún no hay calificaciones
- Teoria EpipolarDocumento48 páginasTeoria EpipolarAldair Puma GonzalesAún no hay calificaciones
- Informe FinalDocumento15 páginasInforme FinalLaura Sofia Zuniga BuitronAún no hay calificaciones
- Principio Analisis MicroscopioDocumento2 páginasPrincipio Analisis MicroscopioAustin DíazAún no hay calificaciones
- Sem8 VisionDocumento4 páginasSem8 VisionNaye FuentesAún no hay calificaciones
- Practica 4 Y5Documento21 páginasPractica 4 Y5Gael MelendezAún no hay calificaciones
- Sintesis Del MovimientoDocumento8 páginasSintesis Del MovimientoGiancarlo Javier Sánchez BriceñoAún no hay calificaciones
- Clase 8 Metodos de ExploraciónDocumento23 páginasClase 8 Metodos de ExploraciónDiego AguileraAún no hay calificaciones
- INFORME PRÁCTICA FOTOGRAMETRIA Elkin UmngDocumento49 páginasINFORME PRÁCTICA FOTOGRAMETRIA Elkin UmngChristian Nicolas Quintero MonteroAún no hay calificaciones
- Presentaçion de EspejosDocumento29 páginasPresentaçion de EspejosGonzalo Benjamin PerezAún no hay calificaciones
- P#5 LB Fisica 4 Tamez Fuentes 1930086Documento7 páginasP#5 LB Fisica 4 Tamez Fuentes 1930086Anacatalina TamezAún no hay calificaciones
- HomeDocumento5 páginasHomealmaAún no hay calificaciones
- Glut OpenGLDocumento15 páginasGlut OpenGLalbert283100% (1)
- Experimento 6Documento7 páginasExperimento 6Jesus AbrahamAún no hay calificaciones
- Corrección Postural en Asiento Ortopédico para Pacientes Con Síndrome de West Con Control Digital Implementado en Un Microcontrolador Atmel 2560Documento18 páginasCorrección Postural en Asiento Ortopédico para Pacientes Con Síndrome de West Con Control Digital Implementado en Un Microcontrolador Atmel 2560Miguel Angel Gómez PérezAún no hay calificaciones
- Fime Fisica 4: Practica 5Documento9 páginasFime Fisica 4: Practica 5Jorge GarciaAún no hay calificaciones
- Practica Paralaje - GADocumento5 páginasPractica Paralaje - GANicol Tatiana Umana OrtizAún no hay calificaciones
- Laboratorio Final Fotogrametria Mauricio CandialesDocumento41 páginasLaboratorio Final Fotogrametria Mauricio CandialesMauricio CandialesAún no hay calificaciones
- Correcciones GeometricasDocumento19 páginasCorrecciones Geometricasshine_rose29Aún no hay calificaciones
- Practica Lentes DelgadasDocumento7 páginasPractica Lentes Delgadasroberto rojasAún no hay calificaciones
- ESPEJOS PLANOS Y ESFERICOS FinalDocumento25 páginasESPEJOS PLANOS Y ESFERICOS FinalJavier RetamalesAún no hay calificaciones
- Informe 3 Lentes DelgadasDocumento7 páginasInforme 3 Lentes DelgadasDavid Ignacio Reyes MurciaAún no hay calificaciones
- Paralaje y Desplazamiento Debido Al Relieve ListoDocumento20 páginasParalaje y Desplazamiento Debido Al Relieve ListoSamsan Osc LunaAún no hay calificaciones
- LOP-006 Lentes Delgadas - VirtualDocumento4 páginasLOP-006 Lentes Delgadas - VirtualBrendaAún no hay calificaciones
- Evaluación y Georreferenciación de Productos Fotogramétricos Con Dron Aplicando Puntos de Control Terrestre.Documento18 páginasEvaluación y Georreferenciación de Productos Fotogramétricos Con Dron Aplicando Puntos de Control Terrestre.Wilbert CruzAún no hay calificaciones
- Localización Espacial de Un Punto en XyzDocumento13 páginasLocalización Espacial de Un Punto en XyzAlejandra ValladaresAún no hay calificaciones
- FocometriaDocumento11 páginasFocometriafacundo dandoloAún no hay calificaciones
- Vistas Auxiliares Secundarias de Objetos de 2D y 3DDocumento21 páginasVistas Auxiliares Secundarias de Objetos de 2D y 3DJuliño Kira QHAún no hay calificaciones
- Geomatica Aplicada Informe FinalDocumento13 páginasGeomatica Aplicada Informe Finaljuan barbosaAún no hay calificaciones
- Uso de La Barra de ParalajeDocumento15 páginasUso de La Barra de Paralajelinay91Aún no hay calificaciones
- Di-001 Calibracion Proyectores de Perfiles 2 PDFDocumento38 páginasDi-001 Calibracion Proyectores de Perfiles 2 PDFRaissaPazVasquezAún no hay calificaciones
- Manual de Control de Calidad en OpticaDocumento251 páginasManual de Control de Calidad en OpticaMely MolinaAún no hay calificaciones
- Geodesia InformeDocumento21 páginasGeodesia InformeManuel Palomino Jorge0% (1)
- #3 Informe Fotogrametría PDFDocumento30 páginas#3 Informe Fotogrametría PDFMaryi Daniela HernandezAún no hay calificaciones
- Orientación Interna o InteriorDocumento16 páginasOrientación Interna o InteriorFaustho Arce Gomez100% (1)
- Practica 5 Estudio de Instrumentos ÓpticosDocumento4 páginasPractica 5 Estudio de Instrumentos Ópticosdiegodominguez1979387Aún no hay calificaciones
- Sistema de LentesDocumento6 páginasSistema de LentesLeonel Surco AmanAún no hay calificaciones
- Reconstrucción Virtual de Accidente Vial PDFDocumento6 páginasReconstrucción Virtual de Accidente Vial PDFel_ldbdAún no hay calificaciones
- Focometria PDFDocumento5 páginasFocometria PDFcartoneandAún no hay calificaciones
- Determinación de La Distancia Focal de Una Lente ConvergenteDocumento9 páginasDeterminación de La Distancia Focal de Una Lente ConvergenteVictor Duré BañuelosAún no hay calificaciones
- 2799 13452 1 PBDocumento20 páginas2799 13452 1 PBSlanderous Fob98Aún no hay calificaciones
- Comparador OpticoDocumento9 páginasComparador OpticoEfraín Gastelum RomeroAún no hay calificaciones
- Fotografía Estéreo para Impresión LenticularDocumento10 páginasFotografía Estéreo para Impresión Lenticularyonny verduguezAún no hay calificaciones
- Pdi PRCT Segmentacion Is2019Documento9 páginasPdi PRCT Segmentacion Is2019Nicolas Rodriguez OsorioAún no hay calificaciones
- AAF Constelaciones 1Documento17 páginasAAF Constelaciones 1Sergio CastañedaAún no hay calificaciones
- Fogtografia DocumentaL Raquel Claveria LopezDocumento62 páginasFogtografia DocumentaL Raquel Claveria LopezREAGORAún no hay calificaciones
- Transito de MercurioDocumento6 páginasTransito de MercurioREAGORAún no hay calificaciones
- Qué Nos Dice La Fotografía Documental PDFDocumento19 páginasQué Nos Dice La Fotografía Documental PDFREAGORAún no hay calificaciones
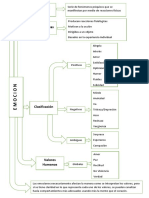
- Mapa Conceptual Caracteristicas de Las Emociones y Los SentimientosDocumento1 páginaMapa Conceptual Caracteristicas de Las Emociones y Los SentimientosREAGORAún no hay calificaciones
- Empresa FamiliarDocumento1 páginaEmpresa FamiliarREAGORAún no hay calificaciones
- Histori As Devid ADocumento4 páginasHistori As Devid ACristhianAlexanderVegaAún no hay calificaciones
- Observacion Lluvia de Estrellas - PerseidasDocumento1 páginaObservacion Lluvia de Estrellas - PerseidasREAGORAún no hay calificaciones
- Programacion Caminatas Sal Si PuedesDocumento2 páginasProgramacion Caminatas Sal Si PuedesREAGORAún no hay calificaciones
- Galileo GalileiDocumento107 páginasGalileo GalileiMárcio GuerraAún no hay calificaciones
- Lectura Resumen Videos Antiguos Griegos PDFDocumento12 páginasLectura Resumen Videos Antiguos Griegos PDFEli OroAún no hay calificaciones
- CIENCIA y Yo Quiero Ser CientificoDocumento426 páginasCIENCIA y Yo Quiero Ser CientificoJTKirk61Aún no hay calificaciones
- Material AdicionalDocumento2 páginasMaterial AdicionalREAGORAún no hay calificaciones
- 10 Pasos para Escribir Un EnsayoDocumento2 páginas10 Pasos para Escribir Un EnsayoREAGORAún no hay calificaciones
- Guia de Uso de Telescopios Astronomia de Campo PDFDocumento21 páginasGuia de Uso de Telescopios Astronomia de Campo PDFREAGOR100% (1)
- Az251 Manual Es PDFDocumento95 páginasAz251 Manual Es PDFAnonymous sHYqY2TnryAún no hay calificaciones
- Conoce Tu Telescopio II EdiciónDocumento70 páginasConoce Tu Telescopio II EdiciónREAGORAún no hay calificaciones
- Tutorial Gimp LugoDocumento60 páginasTutorial Gimp LugoMikail FuentesAún no hay calificaciones
- Huntington, Samuel. (1989) - El Sobrio Significado de La Democracia PDFDocumento26 páginasHuntington, Samuel. (1989) - El Sobrio Significado de La Democracia PDFSergio Velasquez100% (1)
- Trabajo Final de RedesDocumento8 páginasTrabajo Final de RedesPablo De La CruzAún no hay calificaciones
- LogixPro - SiloDocumento2 páginasLogixPro - Silogamh13100% (3)
- Secadores de Dos o Mas Rodillos Aplicaciones EsquemasDocumento5 páginasSecadores de Dos o Mas Rodillos Aplicaciones EsquemasJhonny Ibarra AgredaAún no hay calificaciones
- CARATULADocumento21 páginasCARATULABrayan Rivera HerreraAún no hay calificaciones
- Herramientas Lean ManufacturingDocumento22 páginasHerramientas Lean ManufacturingDiana GarciaAún no hay calificaciones
- Cafetera Silvercrest SEM 1100 A1Documento22 páginasCafetera Silvercrest SEM 1100 A1deividkekaAún no hay calificaciones
- 1.15 Pistones, Anillos y Bielas PDFDocumento7 páginas1.15 Pistones, Anillos y Bielas PDFjorhrAún no hay calificaciones
- Seguros Más Usuales Del Comercio ExteriorDocumento2 páginasSeguros Más Usuales Del Comercio ExteriorLili GutyAún no hay calificaciones
- Variables Aliatorias ContinuasDocumento6 páginasVariables Aliatorias Continuasjosue ChAún no hay calificaciones
- SG-F02 Contrato de Servicios ProfesionalesDocumento4 páginasSG-F02 Contrato de Servicios ProfesionalesAntonio Salazar GutierrezAún no hay calificaciones
- PA2 - FC2 ActualizadoDocumento4 páginasPA2 - FC2 ActualizadoHeiner CapchaAún no hay calificaciones
- Temario de Tecnologías AlternativasDocumento10 páginasTemario de Tecnologías AlternativasGraciela GuintoAún no hay calificaciones
- Boletín - Oficial - 2010 09 21 SociedadesDocumento44 páginasBoletín - Oficial - 2010 09 21 SociedadesalejandrorfbAún no hay calificaciones
- General ElectricDocumento3 páginasGeneral ElectricAndrés SotoAún no hay calificaciones
- Unidad 4Documento28 páginasUnidad 4JosesitoAún no hay calificaciones
- Todo Plaza VeaDocumento20 páginasTodo Plaza VeaOmar FuentesAún no hay calificaciones
- Práctica Introducción A La RoboticaDocumento3 páginasPráctica Introducción A La RoboticaNey Eduardo GarciaAún no hay calificaciones
- Acta de Operacion y MantenimientoDocumento2 páginasActa de Operacion y MantenimientoAlessandro Gamarra Gomero100% (1)
- Historia EconómicaDocumento5 páginasHistoria Económicajhoselyn torresAún no hay calificaciones
- Alm - Asset Liability Management Gestión de Activos Y PasivosDocumento11 páginasAlm - Asset Liability Management Gestión de Activos Y PasivosDante Junior MogollonAún no hay calificaciones
- Texto ParaleloDocumento19 páginasTexto ParaleloAbe juanAún no hay calificaciones
- EJERCICIOS Primas Contingencias de VidaDocumento11 páginasEJERCICIOS Primas Contingencias de VidaFelipe PlataAún no hay calificaciones
- Tecnologia Zig BeeDocumento17 páginasTecnologia Zig BeeGabbyspicenAún no hay calificaciones
- Ultracoat Recubrimiento para TornilloDocumento2 páginasUltracoat Recubrimiento para TornilloAnonymous HrXPSgQ32TAún no hay calificaciones
- 2do Parcial Formulación y Evaluación de ProyectosDocumento11 páginas2do Parcial Formulación y Evaluación de ProyectosDaniel BaqueroAún no hay calificaciones
- Doctrina Societaria 393 - Agosto 2020Documento132 páginasDoctrina Societaria 393 - Agosto 2020Carlos MartignoniAún no hay calificaciones
- DerechosDocumento2 páginasDerechosNely Rosales41Aún no hay calificaciones
- Identificación: Impuestos de CúcutaDocumento4 páginasIdentificación: Impuestos de Cúcutaalfredo lopezAún no hay calificaciones