También podría gustarte
- Trabajo Interpolación de La Spline CúbicaDocumento13 páginasTrabajo Interpolación de La Spline CúbicaMaria Naral100% (1)
- Colosenses PDFDocumento9 páginasColosenses PDFDaniel CifuentesAún no hay calificaciones
- Curvas ConicasDocumento4 páginasCurvas ConicasAriel QuispeAún no hay calificaciones
- Identidad de EulerDocumento8 páginasIdentidad de EulerEduardo Baldeón CamposAún no hay calificaciones
- LeontievDocumento4 páginasLeontievAndres Patarroyo73% (15)
- Ejercicios de Matricez Con ExcelDocumento6 páginasEjercicios de Matricez Con ExcelCharly NuñezAún no hay calificaciones
- Ajuste de Redes Gps - ActualizadoDocumento130 páginasAjuste de Redes Gps - ActualizadoJulian David Henao EscobarAún no hay calificaciones
- El Bandoneon Ricardo Salton PDFDocumento16 páginasEl Bandoneon Ricardo Salton PDFDaniel CifuentesAún no hay calificaciones
- Métodos de Análisis Multivariante - Carlos CuadrasDocumento304 páginasMétodos de Análisis Multivariante - Carlos CuadrasJavier RuizAún no hay calificaciones
- Apuntes Sólido RígidoDocumento3 páginasApuntes Sólido RígidoFrancisco Vicente Garcia IrlesAún no hay calificaciones
- Tema6 - Resumen 3Documento5 páginasTema6 - Resumen 3Aguirre Lopez Juan ManuelAún no hay calificaciones
- Teorema y Ejercicios Conservacion - Momento - AngularDocumento3 páginasTeorema y Ejercicios Conservacion - Momento - AngularjuanpereztrujilloAún no hay calificaciones
- MiFee - CL - Pauta Ayudantia 8Documento3 páginasMiFee - CL - Pauta Ayudantia 8paquebotttAún no hay calificaciones
- Mod 6Documento28 páginasMod 6Maquiventa MelquisedekAún no hay calificaciones
- Cómo Leer Los Diagramas de DispersiónDocumento4 páginasCómo Leer Los Diagramas de DispersiónAndreRamirezValenzuelaAún no hay calificaciones
- 07 RegresionDocumento30 páginas07 RegresionFerAún no hay calificaciones
- Lab 4 FDocumento14 páginasLab 4 FJuan carlosc Leon sotoAún no hay calificaciones
- 11 - U8bCinética Tridimensional 20Documento81 páginas11 - U8bCinética Tridimensional 20TUmamaAún no hay calificaciones
- Derivadas Parciales Direccionales 2016 12 PDFDocumento4 páginasDerivadas Parciales Direccionales 2016 12 PDFGabu CamachoAún no hay calificaciones
- Fourier Esime ZacatencoDocumento6 páginasFourier Esime Zacatencoadrian reyesAún no hay calificaciones
- Centro de Masas PapusDocumento7 páginasCentro de Masas Papusadler benites montalvoAún no hay calificaciones
- Holzer Porticos Saber - UCVDocumento19 páginasHolzer Porticos Saber - UCVRuffo Belisario Sallo CubaAún no hay calificaciones
- Centroides 2Documento8 páginasCentroides 2adler benites montalvoAún no hay calificaciones
- Clase 17 IntegralDocumento18 páginasClase 17 IntegralJhon Edison Bravo BuitragoAún no hay calificaciones
- Modelos de Regresión Lineal Simple-ResumenDocumento5 páginasModelos de Regresión Lineal Simple-ResumenJericoAún no hay calificaciones
- Capitulo Iii Medidas de Tendencia CentralDocumento51 páginasCapitulo Iii Medidas de Tendencia CentralClaudio Cruz RodríguezAún no hay calificaciones
- ECONOMETRÍADocumento5 páginasECONOMETRÍASergio PérezAún no hay calificaciones
- Buleje Moscoso - Metodo de ChebyshevDocumento14 páginasBuleje Moscoso - Metodo de ChebyshevM Steff BMAún no hay calificaciones
- Calculo II Guia Integral de RiemannDocumento6 páginasCalculo II Guia Integral de RiemanneaherreramAún no hay calificaciones
- Tarea Reg PDFDocumento5 páginasTarea Reg PDFJorge PontonAún no hay calificaciones
- Cinética de Cuerpos Rígidos en El PlanoDocumento9 páginasCinética de Cuerpos Rígidos en El PlanoJesus Ovalles100% (1)
- Regresión Lineal SimpleDocumento31 páginasRegresión Lineal SimpleYasely Lecca AvilaAún no hay calificaciones
- Regresion Lineal SimpleDocumento57 páginasRegresion Lineal SimpleChickita BastidasAún no hay calificaciones
- Practica 1 ExcelDocumento6 páginasPractica 1 ExcelY̶o̶s̶e̶l̶y̶n̶ ̶o̶c̶Aún no hay calificaciones
- Trabajo de Fisica, Cuarto CorteDocumento34 páginasTrabajo de Fisica, Cuarto Cortemarlon stiven arizalunaAún no hay calificaciones
- Flexión Esviada y Compuesta Esviada PDFDocumento16 páginasFlexión Esviada y Compuesta Esviada PDFCesar RosasAún no hay calificaciones
- 5 y 6 EconometriaDocumento3 páginas5 y 6 EconometriaAlexita LopezAún no hay calificaciones
- Taller 1Documento4 páginasTaller 1BenZo4630 3Aún no hay calificaciones
- Apunte 2.0 Datos Bivariados 20210406 MartesDocumento5 páginasApunte 2.0 Datos Bivariados 20210406 MartesCaliope TaliaAún no hay calificaciones
- Calculo Taller 1Documento32 páginasCalculo Taller 1Juan Castro FrancoAún no hay calificaciones
- Energía en El Movimiento Rotacional - Clase 2Documento6 páginasEnergía en El Movimiento Rotacional - Clase 2Hebert Nelson Quiñonez OrtizAún no hay calificaciones
- 4.mínimos Cuadrados01Documento3 páginas4.mínimos Cuadrados01chat 1204Aún no hay calificaciones
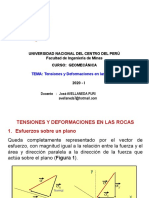
- Tensiones y Deformaciones en Las RocasDocumento21 páginasTensiones y Deformaciones en Las RocasraAún no hay calificaciones
- Taller 1 Econometría 1 PDFDocumento4 páginasTaller 1 Econometría 1 PDFVivian Astorayme HurtadoAún no hay calificaciones
- Laboratorio 3 Fisic 1Documento10 páginasLaboratorio 3 Fisic 1JANETH PATRICIA HERNANDEZ BASTIDASAún no hay calificaciones
- Tema 22Documento12 páginasTema 22Arturo R.G.Aún no hay calificaciones
- Sistemas LinealesDocumento33 páginasSistemas LinealesAwka MülfenAún no hay calificaciones
- Parcial 3 Mecánica Cuántica, Gabriel LeónDocumento4 páginasParcial 3 Mecánica Cuántica, Gabriel LeónGabriel LeonAún no hay calificaciones
- PRACTICA N 1. Construcción de Gráficas y Ecuaciones EmpíricasDocumento4 páginasPRACTICA N 1. Construcción de Gráficas y Ecuaciones EmpíricasGustavo Ortega ContrerasAún no hay calificaciones
- Estadistica - EspacialDocumento19 páginasEstadistica - EspacialYerlen Carolina Cabarcas RodríguezAún no hay calificaciones
- Curso Ana Regres 2Documento245 páginasCurso Ana Regres 2Manuel GarzaAún no hay calificaciones
- Regresión Lineal SimpleDocumento28 páginasRegresión Lineal SimpleAzul Geronimo RojasAún no hay calificaciones
- Integral Definida PDFDocumento46 páginasIntegral Definida PDFHeydy TintayaAún no hay calificaciones
- Denavit HartenbergDocumento6 páginasDenavit HartenbergchendoAún no hay calificaciones
- Formulario ÓPTICADocumento15 páginasFormulario ÓPTICAJuan García MenéndezAún no hay calificaciones
- Introducci Onalarob Otica M Ovil: Primer Cuatrimestre de 2018Documento21 páginasIntroducci Onalarob Otica M Ovil: Primer Cuatrimestre de 2018L.RobledoAún no hay calificaciones
- 03 - Propiedades AsintóticasDocumento9 páginas03 - Propiedades AsintóticasMile León MezaAún no hay calificaciones
- Integral Numérica ADocumento8 páginasIntegral Numérica AArturo Ramírez AltamiranoAún no hay calificaciones
- Taller Repaso (31 05 2022)Documento3 páginasTaller Repaso (31 05 2022)Juan GiraldoAún no hay calificaciones
- Superficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007Documento30 páginasSuperficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007MaryAún no hay calificaciones
- Integral DefinidaDocumento17 páginasIntegral DefinidaChabeli Cruzado SuárezAún no hay calificaciones
- Informe de Mecanica de SolidosDocumento10 páginasInforme de Mecanica de SolidosAngel Jesus Quintana AltamiranoAún no hay calificaciones
- Taller Preapacial 1Documento2 páginasTaller Preapacial 1Juan David Bazurdo CastañedaAún no hay calificaciones
- Centro de MasaDocumento18 páginasCentro de MasaOliverAún no hay calificaciones
- Leccion Venciendo Las Barreras Del Evangelismo 18Documento5 páginasLeccion Venciendo Las Barreras Del Evangelismo 18Daniel CifuentesAún no hay calificaciones
- DíptidoDocumento2 páginasDíptidoDaniel CifuentesAún no hay calificaciones
- Polinómios MatricialesDocumento2 páginasPolinómios MatricialesDaniel CifuentesAún no hay calificaciones
- Introducción Álgebra LinealDocumento7 páginasIntroducción Álgebra LinealDaniel CifuentesAún no hay calificaciones
- EjerDocumento1 páginaEjerJcq AfAún no hay calificaciones
- Actividad 2. Revisión de Libros de Álgebra Nivel SuperiorDocumento3 páginasActividad 2. Revisión de Libros de Álgebra Nivel Superiorjose camiloAún no hay calificaciones
- Introducción Al Método de Los Elementos Finitos: Un Enfoque MatemáticoDocumento138 páginasIntroducción Al Método de Los Elementos Finitos: Un Enfoque MatemáticoNeptali_RomeroAún no hay calificaciones
- Matrices Ejercicios03Documento7 páginasMatrices Ejercicios03GabyAún no hay calificaciones
- Ec DiferencialesDocumento15 páginasEc DiferencialesMarcos CortelezziAún no hay calificaciones
- Cin Ejer Der InteDocumento15 páginasCin Ejer Der InteHelen AndreaAún no hay calificaciones
- Problemas Propuestos de VectoresDocumento13 páginasProblemas Propuestos de VectoresLeopardo Nublado0% (1)
- Tarea de Calculo UNEFADocumento13 páginasTarea de Calculo UNEFAAngel Luis GonzalezAún no hay calificaciones
- Herramientas PDFDocumento40 páginasHerramientas PDFAgustito CMAún no hay calificaciones
- Magnitudes Físicas Vectoriales para Segundo Grado de SecundariaDocumento4 páginasMagnitudes Físicas Vectoriales para Segundo Grado de Secundariavictor medinaAún no hay calificaciones
- Separata - Matemática II - 3 - Zegarra 2022-IIDocumento13 páginasSeparata - Matemática II - 3 - Zegarra 2022-IIMary CAún no hay calificaciones
- Actividad 12-Vectores en R y RDocumento7 páginasActividad 12-Vectores en R y RRuth Amalia Motivar SuarezAún no hay calificaciones
- Informe Gram SchmidtDocumento5 páginasInforme Gram SchmidtJaneth Alpala100% (1)
- Ejercitacion Entregable Inversa, Adjunta y CramerDocumento3 páginasEjercitacion Entregable Inversa, Adjunta y CramerAndres Felipe SANCHEZ FUQUENAún no hay calificaciones
- 5 Valores y Vectores PropiosDocumento40 páginas5 Valores y Vectores PropiosvictorAún no hay calificaciones
- Actividad 1 - ADocumento5 páginasActividad 1 - AJess OcampoAún no hay calificaciones
- Actividades MatricesDocumento2 páginasActividades MatricesPilar Fortuny100% (1)
- Introducción Al Análisis VectorialDocumento19 páginasIntroducción Al Análisis Vectorialanon_533732751Aún no hay calificaciones
- Evaluacion 3Documento9 páginasEvaluacion 3carlos ceronAún no hay calificaciones
- Ejercicios Propuestos de Laboratorio de MatlabDocumento20 páginasEjercicios Propuestos de Laboratorio de MatlabedwinAún no hay calificaciones
- Tarea 2 - 100408 - 154 - Carlos Enrique Parra CastañedaDocumento21 páginasTarea 2 - 100408 - 154 - Carlos Enrique Parra Castañedacarlos parraAún no hay calificaciones
- Algebra Lineal - EJERCICIO 4 LETRA CDocumento8 páginasAlgebra Lineal - EJERCICIO 4 LETRA CCLAUDIA PATRICIA CASTILLO GRANADOSAún no hay calificaciones
- Practica 8 - MatricesDeCramerDocumento9 páginasPractica 8 - MatricesDeCramerOliver Jesus Mazaba RivasAún no hay calificaciones
- Trabajo Final Pre CálculoDocumento44 páginasTrabajo Final Pre CálculoDarlin HernandezAún no hay calificaciones
- Cronograma de Calculo 3Documento2 páginasCronograma de Calculo 3Diego YesidAún no hay calificaciones