También podría gustarte
- Trabajo Completo Control Primera FaseDocumento66 páginasTrabajo Completo Control Primera FaseJuniior Cabrera BolivarAún no hay calificaciones
- Sol 4pca Calculo II-unmsm - EfagDocumento8 páginasSol 4pca Calculo II-unmsm - EfagHelton estevan querevalu paredesAún no hay calificaciones
- Raul Olmos Sistemas Dinamicos - Ejercicio 2Documento6 páginasRaul Olmos Sistemas Dinamicos - Ejercicio 2Luis Fernando Barrera UribeAún no hay calificaciones
- P2.3 Libro de DorfDocumento2 páginasP2.3 Libro de DorfEdgar G RubioAún no hay calificaciones
- Ejercicios Resueltos Control AutomáticoDocumento13 páginasEjercicios Resueltos Control AutomáticoMariano IanniAún no hay calificaciones
- Ejercicio 3.2 BishopDocumento9 páginasEjercicio 3.2 BishopDaysi Rashell RegaladoAún no hay calificaciones
- Parcial II (Cesar Brizuela)Documento14 páginasParcial II (Cesar Brizuela)Cesar BrizuelaAún no hay calificaciones
- Diagrama de Bloques - CRISTHIAN QUISPEDocumento10 páginasDiagrama de Bloques - CRISTHIAN QUISPEBrian Condo RamosAún no hay calificaciones
- Integrales Múltiples PDFDocumento6 páginasIntegrales Múltiples PDFProyecto de GradoAún no hay calificaciones
- Respuesta de Un Sistema LTI Con Entrada ExponencialDocumento12 páginasRespuesta de Un Sistema LTI Con Entrada ExponencialRicardo TroncosoAún no hay calificaciones
- TP3 Arguello CristhianDocumento5 páginasTP3 Arguello CristhianCriss ArguelloAún no hay calificaciones
- Deber 1Documento14 páginasDeber 1Alex PintadoAún no hay calificaciones
- Pre-Saberes Edwin Lievano G22Documento8 páginasPre-Saberes Edwin Lievano G22Edwin Fabian LievanoAún no hay calificaciones
- Taller 5Documento4 páginasTaller 5Manuel GalvisAún no hay calificaciones
- Circuito Mixto RLCDocumento6 páginasCircuito Mixto RLCAngela Dayana Algarra100% (1)
- Trabajo 3Documento12 páginasTrabajo 3jaimeAún no hay calificaciones
- BCMV U3 Ea JebrDocumento5 páginasBCMV U3 Ea JebrJesús BuenoAún no hay calificaciones
- METODO GENERAL DE DISCRETIZACION c2d MatlabDocumento10 páginasMETODO GENERAL DE DISCRETIZACION c2d MatlabFranzum MamaniAún no hay calificaciones
- Asignación #2Documento5 páginasAsignación #2Isaias AlmendralAún no hay calificaciones
- Primera Entre MatemáticasDocumento15 páginasPrimera Entre MatemáticasJesús Hurtado IzquierdoAún no hay calificaciones
- Doble Malla SolucionesDocumento3 páginasDoble Malla Solucionesricardotroncoso2012Aún no hay calificaciones
- Solucion P03 - 20230502Documento3 páginasSolucion P03 - 20230502Jose Carlos Jimenez AlburquequeAún no hay calificaciones
- Informe Previo 6Documento13 páginasInforme Previo 6dsdAún no hay calificaciones
- Ejercicio 3.12: Ingeniería de Las Reacciones QuímicasDocumento22 páginasEjercicio 3.12: Ingeniería de Las Reacciones QuímicasCecilia FernándezAún no hay calificaciones
- Taller de Diseño de Una Planta de Un Sistema No Lineal de Segundo OrdenDocumento11 páginasTaller de Diseño de Una Planta de Un Sistema No Lineal de Segundo OrdenAndres FelipeAún no hay calificaciones
- Parcial 4 Sem 2023-03 SolucionDocumento7 páginasParcial 4 Sem 2023-03 Soluciondeinerale2004Aún no hay calificaciones
- Tarea Función de TransferenciaDocumento5 páginasTarea Función de TransferenciaJohanSebastiianHenaoAún no hay calificaciones
- Teoria de Control 2da AsignaciónDocumento18 páginasTeoria de Control 2da AsignaciónJoaquin CalderaAún no hay calificaciones
- Catálogo 1 Sistema Masa-Resorte-AmortiguadorDocumento27 páginasCatálogo 1 Sistema Masa-Resorte-AmortiguadorEdmundo Rivera Veras91% (11)
- Tema 3 Análisis de Respuesta en El TiempoDocumento27 páginasTema 3 Análisis de Respuesta en El TiempoMiguelAún no hay calificaciones
- Trabajo FinalDocumento13 páginasTrabajo Finalandres becerraAún no hay calificaciones
- Ejercicios-Teoria-Control G1 N4 PDFDocumento19 páginasEjercicios-Teoria-Control G1 N4 PDFMAYRA PUEDMAGAún no hay calificaciones
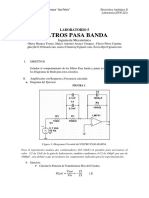
- Filtro Pasa BandaDocumento11 páginasFiltro Pasa BandaGhery Huanca TorrezAún no hay calificaciones
- Taller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFDocumento26 páginasTaller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFJulian AlcalaAún no hay calificaciones
- Unidad 2 Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento8 páginasUnidad 2 Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La Frecuenciamarcos andres nieves gulloAún no hay calificaciones
- Series de FourierDocumento13 páginasSeries de FourierBrandon VillegasAún no hay calificaciones
- Ejercicio - 1 TAREA 1 CONTROL ANALOGICODocumento5 páginasEjercicio - 1 TAREA 1 CONTROL ANALOGICODeimy TorresAún no hay calificaciones
- ProblemarioDocumento77 páginasProblemarioCESAR HERNANDEZAún no hay calificaciones
- AyCP Ejercicios Tema1 SOLUCIONES 2020Documento18 páginasAyCP Ejercicios Tema1 SOLUCIONES 2020peposasunaAún no hay calificaciones
- EF Mate4 2017-1-SolDocumento10 páginasEF Mate4 2017-1-SolRonaldPortugalAún no hay calificaciones
- Informe 9 Grupo 6 PDFDocumento17 páginasInforme 9 Grupo 6 PDFPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Retenedor de Orden UnoDocumento7 páginasRetenedor de Orden Unofredy javier vilca zamataAún no hay calificaciones
- Tarea3 Elasticidad Marin Valenzuela LetelierDocumento7 páginasTarea3 Elasticidad Marin Valenzuela Letelierraul.peraltaAún no hay calificaciones
- Pid Ley ControlDocumento4 páginasPid Ley ControlJuan Luis RodriguezAún no hay calificaciones
- Analisis AscensorDocumento6 páginasAnalisis AscensorJavierAún no hay calificaciones
- Variables de EstadoDocumento12 páginasVariables de EstadoChristian SaraguroAún no hay calificaciones
- INFORMEDocumento9 páginasINFORMEAron P Barrios DuranAún no hay calificaciones
- Practica 4Documento40 páginasPractica 4Pérez Cuéllar María FernandaAún no hay calificaciones
- Taller Auto ImprimirDocumento11 páginasTaller Auto ImprimirJandres MaldonadoAún no hay calificaciones
- Derivadas UnadDocumento13 páginasDerivadas UnadRafael castañeda duqueAún no hay calificaciones
- EVALUACION 2-Controladores-IndustrialesDocumento9 páginasEVALUACION 2-Controladores-IndustrialesAlexis JavierAún no hay calificaciones
- Tarea3-Ecuaciones Dieferenciales-Erika RomeroDocumento18 páginasTarea3-Ecuaciones Dieferenciales-Erika Romerosolanyi romeroAún no hay calificaciones
- Ejercicios Resueltos PresaberesDocumento8 páginasEjercicios Resueltos PresaberesNahum GutierrezAún no hay calificaciones
- Entrega Tarea 3 IRHDocumento17 páginasEntrega Tarea 3 IRHfernando orosAún no hay calificaciones
- Simulación Matemática de Yacimientos TAREA 5Documento6 páginasSimulación Matemática de Yacimientos TAREA 5DianaFlomoAún no hay calificaciones
- Problema 1Documento10 páginasProblema 1Gerardo Chavez CovarrubiasAún no hay calificaciones
- 99 Conclusiones y RecomendacionesDocumento0 páginas99 Conclusiones y RecomendacionesDaniel EscobarAún no hay calificaciones
- Manual de Entrenamiento de Pantallas de LCD Con Guia de Fallas y ReparacionDocumento4 páginasManual de Entrenamiento de Pantallas de LCD Con Guia de Fallas y ReparacionSolo Navarro100% (3)
- Practica de TransistoresDocumento10 páginasPractica de TransistoreslamemelaAún no hay calificaciones
- TRANSFORMADORES MONOFASICOS Pineda Villanueva RobertoDocumento18 páginasTRANSFORMADORES MONOFASICOS Pineda Villanueva RobertorobertoAún no hay calificaciones
- CAPACITORESDocumento61 páginasCAPACITORESErikaAún no hay calificaciones
- AnteProyecto - Diseño de Un Modelo de Salón Inteligente Al Interior Del ITSCDocumento25 páginasAnteProyecto - Diseño de Un Modelo de Salón Inteligente Al Interior Del ITSCJuan IgnacioAún no hay calificaciones
- MultímetroDocumento5 páginasMultímetroDavid GómezAún no hay calificaciones
- Tipos de ModulacionDocumento19 páginasTipos de Modulacionjhosmell alfaroAún no hay calificaciones
- Proyecto - Sistema - de Asistencia Con Huella Dactilar1Documento7 páginasProyecto - Sistema - de Asistencia Con Huella Dactilar1oscar hectorAún no hay calificaciones
- Cuaderno de Informes 03Documento14 páginasCuaderno de Informes 03Sergio Escarrachi SotoAún no hay calificaciones
- Lab 1 de Maquinas ElectricasDocumento5 páginasLab 1 de Maquinas ElectricasAngel David CruzAún no hay calificaciones
- Cargador InalambricoDocumento15 páginasCargador InalambricotexAún no hay calificaciones
- Ficha Técnica Del Producto: Interruptor Automático Compact Nsx250F Micrologic 2.2 250 A 3P3DDocumento4 páginasFicha Técnica Del Producto: Interruptor Automático Compact Nsx250F Micrologic 2.2 250 A 3P3DEjecutivo de VentasAún no hay calificaciones
- Curso de Variadores de Frecuencia 1Documento93 páginasCurso de Variadores de Frecuencia 1Rodrigo LopezAún no hay calificaciones
- Maxima Demanda Del Complejo DeportivoDocumento5 páginasMaxima Demanda Del Complejo DeportivoEdinsonTapiaAún no hay calificaciones
- Amplificadores MultietapaDocumento44 páginasAmplificadores MultietapaJonathan Polania100% (5)
- Aplicacion de Los Sistemas Digitales Combinacionales (Parte 1)Documento35 páginasAplicacion de Los Sistemas Digitales Combinacionales (Parte 1)egyyoAún no hay calificaciones
- 1 - Distribucion Electrica SchneiderDocumento32 páginas1 - Distribucion Electrica SchneiderWalter Chavez100% (1)
- 2-Fallas Del Sistema Electrico 24v y Sit - Prop.930eDocumento39 páginas2-Fallas Del Sistema Electrico 24v y Sit - Prop.930eLuis Riveros Franz75% (4)
- Red de ZobelDocumento11 páginasRed de ZobelHernan CharcaAún no hay calificaciones
- Resistencia Aire Xsara PDFDocumento4 páginasResistencia Aire Xsara PDFSimon Ponce ClavelAún no hay calificaciones
- Generacion ElectricaDocumento4 páginasGeneracion ElectricaalexisAún no hay calificaciones
- CC 20capitulo2aplicacionesDocumento6 páginasCC 20capitulo2aplicacionesErasmo GómezAún no hay calificaciones
- Cintas Led y Drivers - Clever Group 2020Documento4 páginasCintas Led y Drivers - Clever Group 2020mario0701Aún no hay calificaciones
- Utilidad de Los Cables Crossover Rollover1Documento4 páginasUtilidad de Los Cables Crossover Rollover1Kenock FacioAún no hay calificaciones
- Tierras de ProteccionDocumento15 páginasTierras de ProteccionFabian UbillaAún no hay calificaciones
- SENADocumento7 páginasSENAJohn Angel CardonaAún no hay calificaciones
- 3.teoria Circuitos ElectricosDocumento3 páginas3.teoria Circuitos ElectricosHellen Gomez LovonAún no hay calificaciones
- Tiristor GtoDocumento13 páginasTiristor GtodanyAún no hay calificaciones
- Sist Presuriz (3+1) - Q 20 Lps at H 35mca - Marca KSB Mod. HYAMAT SPD 4-2502 B 4kW DN150Documento10 páginasSist Presuriz (3+1) - Q 20 Lps at H 35mca - Marca KSB Mod. HYAMAT SPD 4-2502 B 4kW DN150Alejandra Nuñez RuzAún no hay calificaciones