También podría gustarte
- Detector de bordes astuto: Revelando el arte de la percepción visualDe EverandDetector de bordes astuto: Revelando el arte de la percepción visualAún no hay calificaciones
- Resolucion Del EjercicioDocumento6 páginasResolucion Del EjercicioJohann Smith Aranda RamosAún no hay calificaciones
- Resolucion Del EjercicioDocumento6 páginasResolucion Del EjercicioJohann Smith Aranda RamosAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Solucion de La Primer Practica de Control Ii de La Segunda ParcialDocumento12 páginasSolucion de La Primer Practica de Control Ii de La Segunda ParcialGEORGE MICHAEL NUÑEZ BACAAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Ejercicio 2 Control DigitalDocumento6 páginasEjercicio 2 Control Digitalshirlyalvarez83Aún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Quiz 5 Control 22003Documento4 páginasQuiz 5 Control 22003Ulises NietoAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Solucionario Examen Parcial 2010-2Documento8 páginasSolucionario Examen Parcial 2010-2janpi12Aún no hay calificaciones
- Diagramas de Bode Con MATLAB - 30!05!2015Documento11 páginasDiagramas de Bode Con MATLAB - 30!05!2015Eduardo GodinezAún no hay calificaciones
- 1 PreparatorioDocumento9 páginas1 PreparatorioAndrea CalderónAún no hay calificaciones
- Antialiasing: Mejora de la claridad visual en la visión por computadoraDe EverandAntialiasing: Mejora de la claridad visual en la visión por computadoraAún no hay calificaciones
- Diagrama de BodeDocumento19 páginasDiagrama de BodeJaime Coronado CarmonaAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Tarea3 JohanPerezDocumento16 páginasTarea3 JohanPerezsalvadore perezAún no hay calificaciones
- Ejemplo Compens Avance Fase 3er Orden PDFDocumento10 páginasEjemplo Compens Avance Fase 3er Orden PDFIñaki Gres CuixartAún no hay calificaciones
- Unidad 2 Compensación Utilizando Métodos de Respuesta en FrecuenciaDocumento36 páginasUnidad 2 Compensación Utilizando Métodos de Respuesta en FrecuenciaAdan CamachoAún no hay calificaciones
- Estado AgrietadoDocumento7 páginasEstado AgrietadoKyhara Nicoll Yamamoto YafacAún no hay calificaciones
- Clase Diseno Frecuencia NewDocumento8 páginasClase Diseno Frecuencia NewJorge Ronceria MuñozAún no hay calificaciones
- Deber 3Documento25 páginasDeber 3Franklin Pilco50% (2)
- 2da Práctica Calificada de Ingeniería de Control IIDocumento15 páginas2da Práctica Calificada de Ingeniería de Control IIBoca JuniorsAún no hay calificaciones
- Tarea 40 Ejercicios Libro Control Estadistico de Procesos Seis SigmaDocumento12 páginasTarea 40 Ejercicios Libro Control Estadistico de Procesos Seis SigmaAna Paula Huerta HerreraAún no hay calificaciones
- Clase Nro 9 2692 PDFDocumento2 páginasClase Nro 9 2692 PDFIvan LequeAún no hay calificaciones
- Ejercicios 7.1Documento32 páginasEjercicios 7.1Juan Rossel HUAún no hay calificaciones
- Practica DirigidaDocumento31 páginasPractica Dirigidajhosdei huarachi mamaniAún no hay calificaciones
- Compensadores en Atraso Usando El Método de RespuestaDocumento15 páginasCompensadores en Atraso Usando El Método de RespuestaLuis RCAún no hay calificaciones
- Radio EnlaceDocumento8 páginasRadio EnlaceAlex ReneAún no hay calificaciones
- Control Leccion8Documento10 páginasControl Leccion8Maria QuimicaAún no hay calificaciones
- Examen de AceroDocumento11 páginasExamen de AceroPatric Flores UgarteAún no hay calificaciones
- SEGUNDO PARCIAL Sem II 2005Documento8 páginasSEGUNDO PARCIAL Sem II 2005Alejandra AriasAún no hay calificaciones
- 42 AmplificadorInstrumentacionDocumento11 páginas42 AmplificadorInstrumentacionKenneth Navarro ChavarriaAún no hay calificaciones
- 429 Ejercicios PDFDocumento4 páginas429 Ejercicios PDFNeycerAnchundiaAún no hay calificaciones
- Ejemplo 2 Compensador de AtrasoDocumento7 páginasEjemplo 2 Compensador de AtrasoLuis GonzálezAún no hay calificaciones
- Retranqueo y Traslado de Cota en CurvaDocumento8 páginasRetranqueo y Traslado de Cota en CurvaMargareth BurgosAún no hay calificaciones
- Taller 01 (2B)Documento9 páginasTaller 01 (2B)Jenny 2424Aún no hay calificaciones
- Diag Algorit Compensador Adelanto Ej B-9-5 4a EdDocumento10 páginasDiag Algorit Compensador Adelanto Ej B-9-5 4a EdGenaro Ivan Chavez CamachoAún no hay calificaciones
- Bode Margene SDocumento8 páginasBode Margene Schecom3Aún no hay calificaciones
- Ejercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCDocumento9 páginasEjercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCMaría Ascensión RT100% (2)
- PC2 Ee438 - Fiee UniDocumento14 páginasPC2 Ee438 - Fiee UniDavidAún no hay calificaciones
- Solución Parcial Sistemas de Potencia Jairo Fabian Jaimes (JJ)Documento7 páginasSolución Parcial Sistemas de Potencia Jairo Fabian Jaimes (JJ)Fernando SanjuanAún no hay calificaciones
- Tercera Nota - FiltrosDocumento16 páginasTercera Nota - FiltrosCarlos Vladimir Flores HenriquezAún no hay calificaciones
- EjemploDocumento2 páginasEjemplorenzo mezaAún no hay calificaciones
- Aporte 2Documento8 páginasAporte 2Magaly QuimbayoAún no hay calificaciones
- Solucion ControlDocumento11 páginasSolucion ControlOscarPulidoAún no hay calificaciones
- Informe Final 3Documento22 páginasInforme Final 3Gedeoni Umiña CelisAún no hay calificaciones
- Final KenpaveDocumento30 páginasFinal KenpaveAndrea NarvaezAún no hay calificaciones
- Laboratorio Nº1 - Sistemas de Control IIDocumento8 páginasLaboratorio Nº1 - Sistemas de Control IIVladimir Falcon LunaAún no hay calificaciones
- Serie 3 RFDocumento15 páginasSerie 3 RFBruno ArtecheAún no hay calificaciones
- Compensación de Adelanto, Retraso y Adelanto-Retraso deDocumento20 páginasCompensación de Adelanto, Retraso y Adelanto-Retraso deabraham_dqhausAún no hay calificaciones
- Puente Preforlfd y LRFDDocumento28 páginasPuente Preforlfd y LRFDmarco gonzalesAún no hay calificaciones
- Ejemplo 3 de Zapata Aislada Tipo Central Con 1 Momento (NTC)Documento4 páginasEjemplo 3 de Zapata Aislada Tipo Central Con 1 Momento (NTC)Alberto FonsecaAún no hay calificaciones
- Diagramas Bode 0809Documento9 páginasDiagramas Bode 0809Agustin ComeglioAún no hay calificaciones
- Problemas Resueltos de Interfases IpnDocumento7 páginasProblemas Resueltos de Interfases IpnBarrera JonathanAún no hay calificaciones
- Diseño CompDocumento4 páginasDiseño CompMiwa IchigenAún no hay calificaciones
- INFORME Jahir CernaDocumento36 páginasINFORME Jahir CernaAntony FloresAún no hay calificaciones
- Lista de Instrucciones Grupo 5Documento23 páginasLista de Instrucciones Grupo 5Johann Smith Aranda RamosAún no hay calificaciones
- Informe GrafcetDocumento19 páginasInforme GrafcetJohann Smith Aranda RamosAún no hay calificaciones
- Automatizacion LogoDocumento33 páginasAutomatizacion LogoJohann Smith Aranda RamosAún no hay calificaciones
- Guía de Practica N04Documento9 páginasGuía de Practica N04Johann Smith Aranda RamosAún no hay calificaciones
- Informe de PracticaDocumento7 páginasInforme de PracticaJohann Smith Aranda Ramos0% (1)
- 3.4 Introduccion A Control Digital PDFDocumento80 páginas3.4 Introduccion A Control Digital PDFJohann Smith Aranda RamosAún no hay calificaciones
- CaratulaDocumento3 páginasCaratulamia solangie miñan martinezAún no hay calificaciones
- Artes Marciales Como Alternativa para La Intervención NeuropsicológicaDocumento2 páginasArtes Marciales Como Alternativa para La Intervención NeuropsicológicaBelén Perez DaltoAún no hay calificaciones
- Estética Alemana Siglo XVIIIDocumento4 páginasEstética Alemana Siglo XVIIIMaría Isabel Rosales AranaAún no hay calificaciones
- Tema 1 SociologiaDocumento38 páginasTema 1 SociologiaRomeo Rostinhuer0% (1)
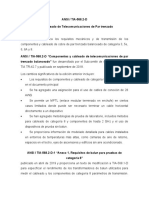
- Ansi Tia-568-2Documento4 páginasAnsi Tia-568-2Leonel EscutiaAún no hay calificaciones
- Teoria 9Documento13 páginasTeoria 9Yesi ServeleonAún no hay calificaciones
- Presentación de Trabajo Final InnovacionDocumento12 páginasPresentación de Trabajo Final InnovacionDiego TejadaAún no hay calificaciones
- La Tipografia Movil en EuropaDocumento4 páginasLa Tipografia Movil en Europagenesis medinaAún no hay calificaciones
- CONBINACIONES Con BastosDocumento4 páginasCONBINACIONES Con Bastoscibercafe barranca hondaAún no hay calificaciones
- Evidencia 7 Informe "Análisis Del Mercado"Documento7 páginasEvidencia 7 Informe "Análisis Del Mercado"DelisAún no hay calificaciones
- # 4 Dipl Inter ATDocumento26 páginas# 4 Dipl Inter ATmiguel_198819Aún no hay calificaciones
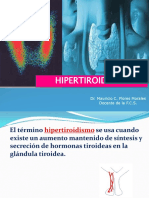
- Hipertiroidismo 2021Documento49 páginasHipertiroidismo 2021Andrea Cruz marzanaAún no hay calificaciones
- Proyecto Mi Amigo El SapoDocumento29 páginasProyecto Mi Amigo El SapoMaría Eugenia Angulo Vela100% (1)
- Urgencias en La Practica OdontologicaDocumento23 páginasUrgencias en La Practica OdontologicaDoxa JuniorAún no hay calificaciones
- Bioindicadores AmbientalesDocumento26 páginasBioindicadores AmbientalesJohan Camilo Duque HoyosAún no hay calificaciones
- Estudio de La Cuenca Del ChaccoDocumento61 páginasEstudio de La Cuenca Del ChaccoJuan Carlos Mendoza CoelloAún no hay calificaciones
- El Árabe A Los Ojos de Un EspañolDocumento3 páginasEl Árabe A Los Ojos de Un EspañolDavid GonzálezAún no hay calificaciones
- Caso ClínicoDocumento5 páginasCaso ClínicoMeliza En EmergenciaAún no hay calificaciones
- Libreto El InocenteDocumento6 páginasLibreto El InocenteCarmen LuzónAún no hay calificaciones
- Ingles Britanico Vs Ingles Americano PDFDocumento9 páginasIngles Britanico Vs Ingles Americano PDFCarlos PantojaAún no hay calificaciones
- TI-2 - AvanceDocumento13 páginasTI-2 - AvanceJordiny Montañez FloresAún no hay calificaciones
- Examen Sociología y Estructura Social - UNEDDocumento1 páginaExamen Sociología y Estructura Social - UNEDttxabitoAún no hay calificaciones
- Oracle Developer Form BuilderDocumento40 páginasOracle Developer Form BuilderRaidenzAún no hay calificaciones
- Convocatoria Facilitador FinancieroDocumento9 páginasConvocatoria Facilitador FinancieroJhorvin Farfán PinedoAún no hay calificaciones
- Solicitud de Disposición de Bienes de Menor de EdadDocumento3 páginasSolicitud de Disposición de Bienes de Menor de EdadJULY VANESA SUAREZ SERRANOAún no hay calificaciones
- MHT PDFDocumento61 páginasMHT PDFenriqueAún no hay calificaciones
- Taller 1 - GartnerDocumento11 páginasTaller 1 - GartnerYisus PinzonAún no hay calificaciones
- TEMA 11 DueloDocumento15 páginasTEMA 11 DueloMaría Pilar GonzálezAún no hay calificaciones
- PROPUESTA TICS CARDENA - GARCIA - Docx-SignedDocumento14 páginasPROPUESTA TICS CARDENA - GARCIA - Docx-SignedNELSON GRANDES JACOMEAún no hay calificaciones
- La - Innovacion - Genera - Riqueza ENTREVISTA A GARY HAMEL PDFDocumento5 páginasLa - Innovacion - Genera - Riqueza ENTREVISTA A GARY HAMEL PDFjuditherrera_11Aún no hay calificaciones