También podría gustarte
- Tecnicas de MicrofoneoDocumento22 páginasTecnicas de Microfoneopancarmo5449100% (4)
- Liderazgo Femenino - TRABAJO FINALDocumento50 páginasLiderazgo Femenino - TRABAJO FINALAngieFernándezAún no hay calificaciones
- Fuerzas en Vigas y Cables PDFDocumento10 páginasFuerzas en Vigas y Cables PDFDanniel IsaacAún no hay calificaciones
- Guía práctica para la escritura de anteproyectos de investigaciónDe EverandGuía práctica para la escritura de anteproyectos de investigaciónAún no hay calificaciones
- Ensayo Película La Familia BelierDocumento2 páginasEnsayo Película La Familia BelierDiana Castro Randisi50% (4)
- El Arbol Causa y EfectosDocumento10 páginasEl Arbol Causa y EfectosFrank GalvanAún no hay calificaciones
- Tema+01 SERVICIOSDocumento38 páginasTema+01 SERVICIOSMario MonteroAún no hay calificaciones
- Aporte Fase 1 Robotica UnadDocumento5 páginasAporte Fase 1 Robotica UnadBrucer Lee Roncallo100% (1)
- Petroleo en La Region de PusiDocumento13 páginasPetroleo en La Region de PusiAlainRonnyPersonifiedAún no hay calificaciones
- Introducción a los análisis estadísticos en RDe EverandIntroducción a los análisis estadísticos en RAún no hay calificaciones
- Fase 1 Revisión de Presaberes y Lectura Del Problema PlaDocumento4 páginasFase 1 Revisión de Presaberes y Lectura Del Problema PlaYhon F ParraAún no hay calificaciones
- Desarrollo Fase 1Documento5 páginasDesarrollo Fase 1Miguel RodriguezAún no hay calificaciones
- Silabo - Fisica 1 - 2020 BDocumento6 páginasSilabo - Fisica 1 - 2020 BDiego Gutierrez RamosAún no hay calificaciones
- Sílabo - Cálculo 1 - 2022 ADocumento6 páginasSílabo - Cálculo 1 - 2022 AAXOAún no hay calificaciones
- Fase 1 Carlos RodriguezDocumento4 páginasFase 1 Carlos Rodriguezgiovanni saldarriagaAún no hay calificaciones
- Fase 1Documento4 páginasFase 1Carlos Rodriguez0% (1)
- Proyecto Modelo TMCDocumento25 páginasProyecto Modelo TMCCarol Plaza BaigorriaAún no hay calificaciones
- Anteproyecto FormatoDocumento8 páginasAnteproyecto FormatokathyAún no hay calificaciones
- Programacion de Tutorias FIR315 - 2023Documento4 páginasProgramacion de Tutorias FIR315 - 2023Saul CanalesAún no hay calificaciones
- BDB Momento InicialDocumento10 páginasBDB Momento InicialJuan Carlos Velasco BastidasAún no hay calificaciones
- Esquema de Proyecto UnidisciplinarioDocumento4 páginasEsquema de Proyecto UnidisciplinarionelsonAún no hay calificaciones
- Tabla Necesidade Fauner RoballoDocumento4 páginasTabla Necesidade Fauner RoballoMaryuryAún no hay calificaciones
- Instrumentos y Trabajo de Campo. Dr. Salomón Marcos Berrocal VillegasDocumento5 páginasInstrumentos y Trabajo de Campo. Dr. Salomón Marcos Berrocal Villegasflotsystems_1001Aún no hay calificaciones
- Proyecto de Investigacion4444Documento31 páginasProyecto de Investigacion4444Edwin Gabriel Calderón EstradaAún no hay calificaciones
- Silabo Cal 1 Ing Mat Firmado DDocumento6 páginasSilabo Cal 1 Ing Mat Firmado Dlopeccami121Aún no hay calificaciones
- Cta1-Pa ImprimirDocumento11 páginasCta1-Pa ImprimirNataly Meredit Mas CiezaAún no hay calificaciones
- Silabo-Calculo en Varias Variables (2021-B) - MinasDocumento6 páginasSilabo-Calculo en Varias Variables (2021-B) - MinasEDSON ALEXANDER JARA CANTUAún no hay calificaciones
- 2016 1proyetoii 160325031609Documento37 páginas2016 1proyetoii 160325031609sayotaAún no hay calificaciones
- Plan 1765 8193 EDDocumento10 páginasPlan 1765 8193 EDsaray carrilloAún no hay calificaciones
- Estadistica Inferencial 2024Documento8 páginasEstadistica Inferencial 2024Isa MorAún no hay calificaciones
- FASE 1metrologiaDocumento5 páginasFASE 1metrologiaXimenaLadinoAún no hay calificaciones
- Robotica Fase 1Documento6 páginasRobotica Fase 1marocaAún no hay calificaciones
- Jornalización Seminario I 2020 1er AñoDocumento6 páginasJornalización Seminario I 2020 1er AñoMeri EU100% (1)
- Fase 1 Revision de Presaberes y Lectura Del ProblemaDocumento4 páginasFase 1 Revision de Presaberes y Lectura Del Problemacarolina pereiraAún no hay calificaciones
- Modelo de Plantilla Pedagógica para Semestre 2020 3-2practica BiostadisticasDocumento3 páginasModelo de Plantilla Pedagógica para Semestre 2020 3-2practica BiostadisticasJulissa GomezAún no hay calificaciones
- Plan 1257 8205 EDDocumento11 páginasPlan 1257 8205 EDfrancohdez10.1Aún no hay calificaciones
- Presentacion Escrita Del Protocolo de Investigacion - Equipo 7Documento45 páginasPresentacion Escrita Del Protocolo de Investigacion - Equipo 7RICARDO HABID RAMOS P�REZAún no hay calificaciones
- Actividades PresaberesDocumento5 páginasActividades PresaberesSthevan Nl0% (1)
- Aspectos Adm ProyectoDocumento7 páginasAspectos Adm ProyectoLeydy Paola Cruz SullonAún no hay calificaciones
- Sistematización de AntecedentesDocumento3 páginasSistematización de Antecedentesjennycadena108Aún no hay calificaciones
- Programación Anual Del Área de Educación para El Trabajo: I. Datos InformativosDocumento18 páginasProgramación Anual Del Área de Educación para El Trabajo: I. Datos InformativosDamarisAún no hay calificaciones
- Teoría Del ConocimientoDocumento5 páginasTeoría Del ConocimientoArdyman EkisdeAún no hay calificaciones
- 1667 - 8691 - ES91 - Matematicas VIDocumento7 páginas1667 - 8691 - ES91 - Matematicas VIAlex AeronAún no hay calificaciones
- Cronograma de Actividades FCTDocumento7 páginasCronograma de Actividades FCTVamalucardAún no hay calificaciones
- SILABO 440 CALCULO 1 Ano 2021 Ciclo ADocumento6 páginasSILABO 440 CALCULO 1 Ano 2021 Ciclo Arussell4100Aún no hay calificaciones
- Informe Final 1Documento6 páginasInforme Final 1Oscar CelisAún no hay calificaciones
- Plan Estadistica DescriptivaDocumento9 páginasPlan Estadistica DescriptivaÁngeles PedrazaAún no hay calificaciones
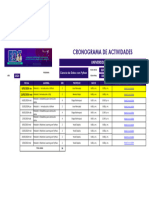
- Cronograma Ciencia de Datos Con Python - 5Documento1 páginaCronograma Ciencia de Datos Con Python - 5Gabriela BerrioAún no hay calificaciones
- Evaluacion A Distancia Olga Lucia GarayDocumento12 páginasEvaluacion A Distancia Olga Lucia GarayGaol GarayAún no hay calificaciones
- RAZONAMIENTO LÓGICO MATEMÁTICO 2020-2 Contadores PDFDocumento17 páginasRAZONAMIENTO LÓGICO MATEMÁTICO 2020-2 Contadores PDFKarla CargutieAún no hay calificaciones
- Brochure Python Básico - Intermedio 27 de AgostoDocumento23 páginasBrochure Python Básico - Intermedio 27 de AgostoJD FCAún no hay calificaciones
- Fase 1 - Briyih - DiazDocumento9 páginasFase 1 - Briyih - DiazBriyith DíazAún no hay calificaciones
- Fase 1 Briyih DiazDocumento9 páginasFase 1 Briyih DiazBriyith DíazAún no hay calificaciones
- 2º Grado - Program. Anual - 2016Documento6 páginas2º Grado - Program. Anual - 2016Juan Vasquez PaisigAún no hay calificaciones
- Plan Intro ProgramaDocumento6 páginasPlan Intro ProgramaJosé Luis Sánchez SánchezAún no hay calificaciones
- Plan de Trabajo - Ética en Las Organizaciones - FCADocumento5 páginasPlan de Trabajo - Ética en Las Organizaciones - FCAYunAún no hay calificaciones
- Sílabo Investigación 2018Documento8 páginasSílabo Investigación 2018Guss TavooAún no hay calificaciones
- MAT103Documento2 páginasMAT103Angel Flores VillalvaAún no hay calificaciones
- Orientación Pedagógica Asíncrona #01Documento4 páginasOrientación Pedagógica Asíncrona #01Juliana Seminario MonzónAún no hay calificaciones
- Silabo Borrador Concep Filoso RRII 2024 A-1Documento7 páginasSilabo Borrador Concep Filoso RRII 2024 A-1Jeferson YucraAún no hay calificaciones
- Proyecto de Investigacion Polo Araujo AlexanderDocumento27 páginasProyecto de Investigacion Polo Araujo AlexanderJoao VQAún no hay calificaciones
- Planeamiento Fitomicologia 2020Documento9 páginasPlaneamiento Fitomicologia 2020Fernando GarcíaAún no hay calificaciones
- Metodología de La Investigación PDFDocumento10 páginasMetodología de La Investigación PDFMitchell HuillcaAún no hay calificaciones
- Actividad 16 Taller de Ciencia de DatosDocumento8 páginasActividad 16 Taller de Ciencia de DatosPablo OntiverosAún no hay calificaciones
- Ruth Mery Bueno Rodriguez - 602Documento5 páginasRuth Mery Bueno Rodriguez - 602Ruth BuenoAún no hay calificaciones
- Using games as a methodology for observing the observerDe EverandUsing games as a methodology for observing the observerAún no hay calificaciones
- Importancia de La Ciencia en La Primera InfanciaDocumento5 páginasImportancia de La Ciencia en La Primera InfanciaLuis Alberto GilAún no hay calificaciones
- Unidad2 Ensamblador 140403112958 Phpapp01Documento48 páginasUnidad2 Ensamblador 140403112958 Phpapp01Luis Alberto GilAún no hay calificaciones
- Como Programar Neo Con ICONOSDocumento16 páginasComo Programar Neo Con ICONOSLuis Alberto Gil100% (1)
- Metodo Cientifico y Metodo de IngenieriaDocumento3 páginasMetodo Cientifico y Metodo de IngenieriaLuis Alberto GilAún no hay calificaciones
- Etapa 1 Sistemas Dinámicos - BarriosDocumento16 páginasEtapa 1 Sistemas Dinámicos - BarriosLuis Alberto GilAún no hay calificaciones
- Paso 5 - Levis BarrigaDocumento27 páginasPaso 5 - Levis BarrigaLuis Alberto GilAún no hay calificaciones
- Trabajo de Computacion GraficaDocumento6 páginasTrabajo de Computacion GraficaMelvi Rosio Mosquera JazzAún no hay calificaciones
- Equipo de Presion CaudalDocumento24 páginasEquipo de Presion CaudalCamilo Alejandro Cubillos TrujilloAún no hay calificaciones
- Manual de Usuario - Marketing Digital RAUDADocumento89 páginasManual de Usuario - Marketing Digital RAUDAjoemixerAún no hay calificaciones
- Circuitos RLC Sin Fuentes en Serie y ParaleloDocumento7 páginasCircuitos RLC Sin Fuentes en Serie y ParaleloLoanAún no hay calificaciones
- Cuestionario de ErgonomiaDocumento4 páginasCuestionario de ErgonomiaalexAún no hay calificaciones
- Formato - Permiso Trabajo en Altura - Ingenia - 2023Documento1 páginaFormato - Permiso Trabajo en Altura - Ingenia - 2023jon levisAún no hay calificaciones
- 3 Sangrado Turbinas ProblemasDocumento15 páginas3 Sangrado Turbinas Problemasoved96Aún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO-PRACTICO - VIRTUAL - PROGRAMACIN ESTOCSTICA - (GRUPO B06)Documento5 páginasActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO-PRACTICO - VIRTUAL - PROGRAMACIN ESTOCSTICA - (GRUPO B06)PoliAún no hay calificaciones
- Reaccion Endergonica y ExergonicaDocumento3 páginasReaccion Endergonica y ExergonicaJosé Soto0% (1)
- Mecanizacion AgricolaDocumento16 páginasMecanizacion AgricolaCARMEN LINDA SUAREZAún no hay calificaciones
- MEMORIA DESCRIPTIVA INST. ELECTRICAS OkDocumento4 páginasMEMORIA DESCRIPTIVA INST. ELECTRICAS OkDonato Andrés Valdez AstoAún no hay calificaciones
- OscilacionesDocumento3 páginasOscilacionesMelany Elizabeth BarriosAún no hay calificaciones
- Planficacion Docente. Ejercicios Propuestos, Repaso, PruebaDocumento7 páginasPlanficacion Docente. Ejercicios Propuestos, Repaso, PruebaManuelAún no hay calificaciones
- Life HojaDocumento12 páginasLife HojacjdjelcopodjAún no hay calificaciones
- Propiedades de Las Sustancias en Funcion de Su Tipo de Enlace y Sus Fuerzas IntermolecularesDocumento13 páginasPropiedades de Las Sustancias en Funcion de Su Tipo de Enlace y Sus Fuerzas IntermolecularesDianaGraceGuzmànMorenoAún no hay calificaciones
- Proyecto de Aula - Iglesia San Nicolás de TolentinoDocumento11 páginasProyecto de Aula - Iglesia San Nicolás de TolentinoJulio muñozAún no hay calificaciones
- 3 Procesos de TransformaciónDocumento16 páginas3 Procesos de TransformaciónFABIOLA NEDA MAMANI TENORIOAún no hay calificaciones
- Clase #7 PDFDocumento23 páginasClase #7 PDFIsaías J. MachacaAún no hay calificaciones
- Piratería en República DominicanaDocumento15 páginasPiratería en República DominicanaAngelaMoretaAún no hay calificaciones
- TDR MALLA ANTIDESLUMBRANTE LIPSA v0Documento10 páginasTDR MALLA ANTIDESLUMBRANTE LIPSA v0SERGIO ALONSO ROCHA FLORESAún no hay calificaciones
- Fabricacion de Los Resorte MecanicosDocumento4 páginasFabricacion de Los Resorte MecanicosEdgardoMegoAún no hay calificaciones
- Brochure HomologacionDocumento2 páginasBrochure HomologacionHuascaran Asesores SacAún no hay calificaciones
- Ensayo Cálculo Rubros Horas Extraordinarias, Suplementarias, Jornada Nocturna UindDocumento2 páginasEnsayo Cálculo Rubros Horas Extraordinarias, Suplementarias, Jornada Nocturna UindElvis AlvarezAún no hay calificaciones
- El Muelle de Carga y DescargaDocumento5 páginasEl Muelle de Carga y DescargaYIKHAIL ANDRENY PENAGOS CUESTAAún no hay calificaciones
- Políticas de Gestión InformáticaDocumento20 páginasPolíticas de Gestión InformáticaEdgar RdzAún no hay calificaciones