También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Derecho Notarial - Alterini - Tomo1Documento1248 páginasDerecho Notarial - Alterini - Tomo1Mario DiazAún no hay calificaciones
- Conversores D - A - A - DDocumento69 páginasConversores D - A - A - DKarla Patricia100% (1)
- Conversor Analogico DigitalDocumento47 páginasConversor Analogico DigitalJhordanStepPascualAún no hay calificaciones
- Trabajo de Investigación 3 ELA2Documento7 páginasTrabajo de Investigación 3 ELA2Juan David Rodriguez BeltranAún no hay calificaciones
- PWM, ADC, DAC y SCRDocumento37 páginasPWM, ADC, DAC y SCRCarlos Guillermo Zavarce Gonzalez100% (2)
- Silva Márquez - Balada Arcos DoradosDocumento112 páginasSilva Márquez - Balada Arcos DoradosJuariDocsAún no hay calificaciones
- Caso Image InternationalDocumento7 páginasCaso Image Internationalmabarcau100% (3)
- Lab08 - Adc y DacDocumento11 páginasLab08 - Adc y DacYeffersom EscobedoAún no hay calificaciones
- Interfaz Con El Mundo AnalogicoDocumento70 páginasInterfaz Con El Mundo Analogicojorge741Aún no hay calificaciones
- ADC Aproximaciones SucesivasDocumento29 páginasADC Aproximaciones SucesivasRamses GarateAún no hay calificaciones
- Convertidores AD-DADocumento8 páginasConvertidores AD-DAJosé Miguel DíazAún no hay calificaciones
- Practica 8 Lab. Elect. IIDocumento8 páginasPractica 8 Lab. Elect. IILuis Ernesto PalmarAún no hay calificaciones
- Practica1.1 Alejandro Torres Torres PDSDocumento10 páginasPractica1.1 Alejandro Torres Torres PDSAlejandro TorresAún no hay calificaciones
- S13 - DacDocumento34 páginasS13 - DacP T RAún no hay calificaciones
- Convertidores Digitales, TrabajoDocumento20 páginasConvertidores Digitales, TrabajoJulio Cesar MAún no hay calificaciones
- Convertidores Analogicos Digitales y Digitales AnalogicosDocumento7 páginasConvertidores Analogicos Digitales y Digitales AnalogicosCristian ChimboAún no hay calificaciones
- Convertidor Analógico-Digital: ConvertDocumento7 páginasConvertidor Analógico-Digital: ConvertnicolasAún no hay calificaciones
- Catagña Alcoser Yupanqui Conversor Analogico Digital p3Documento9 páginasCatagña Alcoser Yupanqui Conversor Analogico Digital p3luisAún no hay calificaciones
- Trabajo de Convertidores 1Documento17 páginasTrabajo de Convertidores 1Andy Moncada MenaAún no hay calificaciones
- Unidad2 AdquisicionDocumento96 páginasUnidad2 AdquisicionIng Lourdes Gabriela Rodríguez RodríguezAún no hay calificaciones
- Convertidores Análogo-Digital y Digital-AnálogoDocumento5 páginasConvertidores Análogo-Digital y Digital-AnálogoCatalina Ramirez Carrera100% (1)
- PRAC10Documento6 páginasPRAC10IT8NBAún no hay calificaciones
- Convertidores ADC y DACDocumento18 páginasConvertidores ADC y DACRaul CruzAún no hay calificaciones
- Actividad 10 Abril AyalaMendozaDADocumento6 páginasActividad 10 Abril AyalaMendozaDAdiego.ayala4399Aún no hay calificaciones
- Clase ADC-DAC - Version 1Documento48 páginasClase ADC-DAC - Version 1RACHEL BOSSAún no hay calificaciones
- DAC y ADCDocumento55 páginasDAC y ADCjeremy floresAún no hay calificaciones
- Convertidores Adc y DacDocumento10 páginasConvertidores Adc y Dacanju139221Aún no hay calificaciones
- Coleccion Ejercicios PDFDocumento118 páginasColeccion Ejercicios PDFEmilio CortiAún no hay calificaciones
- Pno 8 PDFDocumento6 páginasPno 8 PDFNestor LazcanoAún no hay calificaciones
- 2.marco Teorico 2.0Documento15 páginas2.marco Teorico 2.0Jamil Carasas TerronesAún no hay calificaciones
- DAC y ADCDocumento55 páginasDAC y ADCleonelAún no hay calificaciones
- Práctica 3: Conversor Analógico Digital (Adc) .: ResumenDocumento3 páginasPráctica 3: Conversor Analógico Digital (Adc) .: ResumenAndres Felipe PadillaAún no hay calificaciones
- Conversores Digital-Analógico (DAC)Documento6 páginasConversores Digital-Analógico (DAC)mrfawkesAún no hay calificaciones
- Circuito Analogico DigitalDocumento11 páginasCircuito Analogico Digitalerik0688Aún no hay calificaciones
- Conversor de Señal Digital A AnalógicaDocumento8 páginasConversor de Señal Digital A AnalógicaLmGamAún no hay calificaciones
- Tipos de ADCDocumento6 páginasTipos de ADCJhony SiguenzaAún no hay calificaciones
- Convertidor Analogico Digital R2RDocumento7 páginasConvertidor Analogico Digital R2RSergio Limck Plnckk100% (1)
- Cad CdaDocumento14 páginasCad CdaJesus Shop Hollister AbercrombieAún no hay calificaciones
- Examen 2 - MORENO ANADocumento5 páginasExamen 2 - MORENO ANAANA BELEN MORENO CORDOVAAún no hay calificaciones
- Preinforme Proyecto 2 ACAM JDOPDocumento14 páginasPreinforme Proyecto 2 ACAM JDOPEdward Nicolas Duarte ValenciaAún no hay calificaciones
- INFORME FINAL Nº4 - Sistemas DigitalesDocumento21 páginasINFORME FINAL Nº4 - Sistemas DigitalesMARIO ALBERTO CCOYORI MENDOZAAún no hay calificaciones
- Prac6 Conv ADCDocumento8 páginasPrac6 Conv ADCEduardoAún no hay calificaciones
- Conversión Digital Analógica - Parte 1Documento21 páginasConversión Digital Analógica - Parte 1Juan Carlos Lluncor MendozaAún no hay calificaciones
- Reporte Del Convertidor Analogico A DigitalDocumento10 páginasReporte Del Convertidor Analogico A DigitalRICHARD LAZARO0% (1)
- Practica Convertidor Analogico-DigitalDocumento17 páginasPractica Convertidor Analogico-DigitalLuis Eduardo Martinez RamosAún no hay calificaciones
- ML313 Unidad 9 Medidores DigitalesDocumento10 páginasML313 Unidad 9 Medidores DigitalesErick Molina AlcarrazAún no hay calificaciones
- Convertidores AD y DADocumento51 páginasConvertidores AD y DAClei Shin100% (1)
- Convertidores GuiaDocumento19 páginasConvertidores GuiaEscobedoAún no hay calificaciones
- DacDocumento2 páginasDacjosueAún no hay calificaciones
- DACsDocumento45 páginasDACsRivera Vega Arantza GuadalupeAún no hay calificaciones
- Convertidor Convertidor Analógico Digital y Converidor de Digital A AnalogoDocumento11 páginasConvertidor Convertidor Analógico Digital y Converidor de Digital A AnalogoSandra Milena Nuñez CuadrosAún no hay calificaciones
- PRACTICA9Documento20 páginasPRACTICA9Mauricio OrtegaAún no hay calificaciones
- El Convertidor Digital AnalógicoDocumento10 páginasEl Convertidor Digital AnalógicoLuis VrgsAún no hay calificaciones
- Cuestionario 1 PDFDocumento16 páginasCuestionario 1 PDFmarco leeAún no hay calificaciones
- Informe DACDocumento9 páginasInforme DACHenry PabonAún no hay calificaciones
- Conversor ADDocumento8 páginasConversor ADJessy KathAún no hay calificaciones
- Tecnicas de OptimizacionDocumento4 páginasTecnicas de OptimizacionBismarck CarrionAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaDe EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaAún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Guía para La Implementación de Estrategias de Sostenibilidad en Diseño y Construcción de Colegios Nuevos de Jornada Única en Colombia PDFDocumento129 páginasGuía para La Implementación de Estrategias de Sostenibilidad en Diseño y Construcción de Colegios Nuevos de Jornada Única en Colombia PDFRafael TamayoAún no hay calificaciones
- Trabajo 02 de Planificacion y Control de Obras CivilesDocumento6 páginasTrabajo 02 de Planificacion y Control de Obras CivilesWilliam Alexander MoranAún no hay calificaciones
- IDENTIDAD Y DEPENDENCIA CULTURALES 2Documento13 páginasIDENTIDAD Y DEPENDENCIA CULTURALES 2arrietajose5106Aún no hay calificaciones
- Proyecto-Instituto Tecnologico YacuibaDocumento19 páginasProyecto-Instituto Tecnologico YacuibaFreddy FloresAún no hay calificaciones
- Cargas Lineales y No-LinealesDocumento34 páginasCargas Lineales y No-LinealesvivianaAún no hay calificaciones
- Bachillerato en EnfermeríaDocumento48 páginasBachillerato en EnfermeríaFernando LuqueñoAún no hay calificaciones
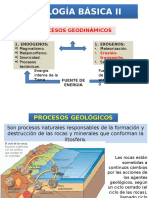
- 08 GEOLOGÍA BÁSICA II Procesos Erosivos GeneralDocumento16 páginas08 GEOLOGÍA BÁSICA II Procesos Erosivos GeneralMoises Hernandez100% (1)
- Programacion Grado Primero (Autoguardado)Documento64 páginasProgramacion Grado Primero (Autoguardado)sofia elena barros cadenasAún no hay calificaciones
- Problemas Con Orientación ClínicaDocumento4 páginasProblemas Con Orientación ClínicaJoel PeñalozaAún no hay calificaciones
- Consumo de Drogas Y Terapia OcupacionalDocumento17 páginasConsumo de Drogas Y Terapia OcupacionalGiovanna RodriguezAún no hay calificaciones
- Codigos de Señalizacion en Plantas Industriales ResumenDocumento4 páginasCodigos de Señalizacion en Plantas Industriales ResumenSteicyHerreraAún no hay calificaciones
- Shakespeare, El Renacimiento y El Contexto LiterarioDocumento20 páginasShakespeare, El Renacimiento y El Contexto LiterarioHiel L. S.Aún no hay calificaciones
- Aritmetica Anual - UNI 2012-IIDocumento11 páginasAritmetica Anual - UNI 2012-IIAmerico Maximo Mata AylasAún no hay calificaciones
- Libro Estudios Sobre Gestión Pública - IsBN OnlineDocumento268 páginasLibro Estudios Sobre Gestión Pública - IsBN OnlineAndres Eduardo AlvarezAún no hay calificaciones
- Secretaria Administrativa y FinancieraDocumento49 páginasSecretaria Administrativa y Financierasonia alexandra mendoza jerezAún no hay calificaciones
- Sentencia RC 243 de Fecha 09-07-2021 Sala de Casación CivilDocumento13 páginasSentencia RC 243 de Fecha 09-07-2021 Sala de Casación CivilMarilis Romero de AcostaAún no hay calificaciones
- Criterio de Selección de TransductoresDocumento1 páginaCriterio de Selección de TransductoresallmcbeallAún no hay calificaciones
- 2010 C Espec Tec Inst SanitariasDocumento27 páginas2010 C Espec Tec Inst SanitariasMirella GonzalesAún no hay calificaciones
- MEMORIA DESCRIPTIVA DE Busqueda CatastralDocumento3 páginasMEMORIA DESCRIPTIVA DE Busqueda CatastralYaneth Berrospi CardenasAún no hay calificaciones
- Sri Rudram - Namakam y ChamakamDocumento27 páginasSri Rudram - Namakam y ChamakamnataliaAún no hay calificaciones
- DBA Matemáticas 6-7Documento2 páginasDBA Matemáticas 6-7edilsitonAún no hay calificaciones
- Geo PlanoDocumento17 páginasGeo PlanoBerenice LiceaAún no hay calificaciones
- Formulario de Consentimiento - Familias Con Adolescentes en DAWEREDocumento1 páginaFormulario de Consentimiento - Familias Con Adolescentes en DAWEREvanefiina gomez mejiasAún no hay calificaciones
- Introducion Trabajo de GrometriaDocumento5 páginasIntroducion Trabajo de GrometriaBrian Montes PinedoAún no hay calificaciones
- La InteligenciaDocumento23 páginasLa Inteligenciavanessa canllaAún no hay calificaciones
- Planificación 2023 Lenguaje 3 Trimestre 4° BDocumento5 páginasPlanificación 2023 Lenguaje 3 Trimestre 4° Bn.villalobos.indAún no hay calificaciones
- Problemas Introduccion 2010Documento4 páginasProblemas Introduccion 2010Marcela V. Pellegrini0% (1)