También podría gustarte
- Santos PeruanosDocumento3 páginasSantos PeruanosGabriel Alfonso Ponce Julca0% (1)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Elementos Estructurales (Bidimensionales, Plane)Documento39 páginasElementos Estructurales (Bidimensionales, Plane)Juan Pablo Pineda0% (1)
- Ejercicios de Maquina III Capitulo 9Documento40 páginasEjercicios de Maquina III Capitulo 9blancorocha77% (13)
- Elasticidad Bidimensional PDFDocumento53 páginasElasticidad Bidimensional PDFEmmanuel MejiaAún no hay calificaciones
- Clase TorneadoDocumento72 páginasClase Torneadojuan carlos100% (1)
- Cuestionario I Auditoria IDocumento8 páginasCuestionario I Auditoria IRasier AmadorAún no hay calificaciones
- Formulario de Estructuras Metálicas. Univ, Dilver Barja HinojosaDocumento4 páginasFormulario de Estructuras Metálicas. Univ, Dilver Barja HinojosaDilver Barja HinojosaAún no hay calificaciones
- Ensayo de Partículas MagnéticasDocumento10 páginasEnsayo de Partículas MagnéticasPaoAún no hay calificaciones
- C1-Introduction To Finite Elements in EngineeringDocumento44 páginasC1-Introduction To Finite Elements in EngineeringDavid Bernal SeguraAún no hay calificaciones
- Problemas MefDocumento82 páginasProblemas MefAnderson Camacho GutiérrezAún no hay calificaciones
- Programa de Cómputo para El Cálculo de Tirantes Críticos en Canales de Sección CompuestaDocumento94 páginasPrograma de Cómputo para El Cálculo de Tirantes Críticos en Canales de Sección CompuestaWilber LopezAún no hay calificaciones
- Formato Invima CosmeticosDocumento4 páginasFormato Invima CosmeticosLauraAún no hay calificaciones
- La Ética en La Gestión de Los Servicios de SaludDocumento7 páginasLa Ética en La Gestión de Los Servicios de SaludKillerzeth0% (1)
- Examen Elementos Finitos (Limpio)Documento36 páginasExamen Elementos Finitos (Limpio)OSCARIEMAún no hay calificaciones
- Ejemplo Elementos FinitosDocumento17 páginasEjemplo Elementos FinitosFlickCapoeiraAún no hay calificaciones
- Apuntes de HidraulicaDocumento78 páginasApuntes de HidraulicaJuanIsraelDuranSillerico100% (1)
- NTP 026Documento25 páginasNTP 026gamepass123Aún no hay calificaciones
- Formulación de Forma DébilDocumento12 páginasFormulación de Forma DébilMario Covarrubias NavarroAún no hay calificaciones
- Manual ED Elas2DDocumento170 páginasManual ED Elas2DDavid Castillo SabedraAún no hay calificaciones
- Examen 1 Elementos FinitosDocumento4 páginasExamen 1 Elementos FinitosRaul Eduardo LC100% (1)
- Triangulación de DelaunayDocumento17 páginasTriangulación de DelaunayJonathan Perez100% (1)
- Matriz PCESDocumento1 páginaMatriz PCESEsteban Reynoso Jauregui100% (1)
- Clase 5 Elementos FinitosDocumento63 páginasClase 5 Elementos FinitosJorGe IsRaelAún no hay calificaciones
- Variables AcotadasDocumento13 páginasVariables AcotadasjulioAún no hay calificaciones
- T02-Residuos PonderadosDocumento13 páginasT02-Residuos PonderadosJulián Jair Cadena SánchezAún no hay calificaciones
- Elementos FinitosDocumento16 páginasElementos FinitosAnthony Salazar100% (1)
- Elemento Triangular 2017 2 PDFDocumento57 páginasElemento Triangular 2017 2 PDFANDRES RIVERAAún no hay calificaciones
- Elementos FinitosDocumento63 páginasElementos FinitosDaniél CárdenasAún no hay calificaciones
- MecanismosDocumento240 páginasMecanismosИван СотоAún no hay calificaciones
- Examen 3 Parcial SolucionarioDocumento4 páginasExamen 3 Parcial SolucionarioDiego CuizaAún no hay calificaciones
- Mantenimiento Del PuenteDocumento7 páginasMantenimiento Del PuenteLeslie HerenciaAún no hay calificaciones
- Elementos Finitos CupulasDocumento19 páginasElementos Finitos CupulasRenato ChaconAún no hay calificaciones
- Metodo de Cross-Ing. Biaggio ArbuluDocumento46 páginasMetodo de Cross-Ing. Biaggio ArbuluMariano Jesús Santa María CarlosAún no hay calificaciones
- Boliviana IrregularDocumento29 páginasBoliviana IrregularCarlos Alejandro MendozaAún no hay calificaciones
- Diseño de Losa Maciza - Aula 01Documento8 páginasDiseño de Losa Maciza - Aula 01ringolinAún no hay calificaciones
- Informe 3Documento8 páginasInforme 3Johan MonroyAún no hay calificaciones
- TP2 - CimentacionesDocumento9 páginasTP2 - CimentacionesLucas Bessone100% (2)
- Hoja de Calculo TransitoDocumento28 páginasHoja de Calculo TransitoErika Cabrera100% (1)
- Volumnes de TraficoDocumento22 páginasVolumnes de TraficoAndres PovedaAún no hay calificaciones
- Solucion Primer Parcial 2-2020Documento6 páginasSolucion Primer Parcial 2-2020Jhonatan CZAún no hay calificaciones
- Manual Land CadDocumento81 páginasManual Land CadEduJägermeisterAún no hay calificaciones
- Cargas Distribuidas OblicuasDocumento3 páginasCargas Distribuidas OblicuasIEB89Aún no hay calificaciones
- Matriz de TensionesDocumento5 páginasMatriz de TensionesCu PerAún no hay calificaciones
- Grupo #02 - Pavimentos-S12Documento20 páginasGrupo #02 - Pavimentos-S12Jhonatan Chinchay yanguaAún no hay calificaciones
- Elementos Finitos en EstructurasDocumento22 páginasElementos Finitos en EstructurasManuel Calero Evangelista0% (1)
- 2 Aplicaciones de 1aporteDocumento3 páginas2 Aplicaciones de 1aporteWitman André Robles LópezAún no hay calificaciones
- Resdes de Tuberías Gradiente Hidráulico 02 ReservoriosDocumento28 páginasResdes de Tuberías Gradiente Hidráulico 02 ReservoriosorbashaAún no hay calificaciones
- Resumen de Plan - Estructuras Hiperestaticas II (II-2018)Documento2 páginasResumen de Plan - Estructuras Hiperestaticas II (II-2018)Diego BravoAún no hay calificaciones
- Trabajo Tipografico - Bathe - Metodos y Elementos FinitosDocumento38 páginasTrabajo Tipografico - Bathe - Metodos y Elementos FinitosAlfonso Enrique Mendoza BenavidesAún no hay calificaciones
- Metodo de Elementos FinitosDocumento16 páginasMetodo de Elementos FinitosMarlinho PaceAún no hay calificaciones
- Tablas para Vigas Con Cartelas Simétricas Lineales A Partir de Funciones de FormaDocumento3 páginasTablas para Vigas Con Cartelas Simétricas Lineales A Partir de Funciones de FormaSantiago Rojas100% (1)
- Computos MetricosDocumento16 páginasComputos MetricosestefaniAún no hay calificaciones
- Elemento Finito BidimensionalDocumento10 páginasElemento Finito BidimensionalLuis Miguel Aquino Chavarria100% (1)
- 07 Analisis Estatico EjemploDocumento2 páginas07 Analisis Estatico EjemploOsler Meza TorresAún no hay calificaciones
- Prueba 2-1Documento3 páginasPrueba 2-1Carlos GuerreroAún no hay calificaciones
- Origen de Los Depositos Del Suelo, Tamaño de GranoDocumento2 páginasOrigen de Los Depositos Del Suelo, Tamaño de GranojorelAún no hay calificaciones
- Represa HooverDocumento14 páginasRepresa HooverVale MAún no hay calificaciones
- Investigacion Metodo Matricial en MarcosDocumento7 páginasInvestigacion Metodo Matricial en MarcosXavier De SantosAún no hay calificaciones
- TAREA #5.1 Cap. 5 de PuentesDocumento1 páginaTAREA #5.1 Cap. 5 de PuentespruebaAún no hay calificaciones
- Compu y PresupuestoDocumento10 páginasCompu y PresupuestoRuddy DelgadoAún no hay calificaciones
- Terraceria y FundacionesDocumento56 páginasTerraceria y FundacionesEduardoGuevaraAún no hay calificaciones
- Introducción A Los Elementos Finitos: UninorteDocumento45 páginasIntroducción A Los Elementos Finitos: UninorteRonald BarriosAún no hay calificaciones
- Pag 15 PDFDocumento53 páginasPag 15 PDFMax José Vera CárdenasAún no hay calificaciones
- Elasticidad UnidimensionalDocumento15 páginasElasticidad UnidimensionalEluis PLAún no hay calificaciones
- Extremos Relativos y AbsolutosDocumento2 páginasExtremos Relativos y AbsolutosGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Ejemplos de SolititudesDocumento13 páginasEjemplos de SolititudesGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Balance de MateriaDocumento5 páginasBalance de MateriaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Instrumwntacion IndustrialDocumento15 páginasInstrumwntacion IndustrialJuanMioMioAún no hay calificaciones
- Objetiv OsDocumento1 páginaObjetiv OsGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Trabajo en Generador de Presentaciones Power Point y PreziDocumento2 páginasTrabajo en Generador de Presentaciones Power Point y PreziGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Diagramas de Fase PDFDocumento49 páginasDiagramas de Fase PDFGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Capitulo 01 Intro PDFDocumento25 páginasCapitulo 01 Intro PDFGabriel Alfonso Ponce JulcaAún no hay calificaciones
- FUNDICIONDocumento18 páginasFUNDICIONGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Adaptación A La Nueva Norma ISO 45001Documento3 páginasAdaptación A La Nueva Norma ISO 45001Gabriel Alfonso Ponce JulcaAún no hay calificaciones
- Laboratorio Circuitos Eléctricos 2Documento24 páginasLaboratorio Circuitos Eléctricos 2luis angel melendrez chinguel100% (1)
- Materiales Capitulo01 PDFDocumento33 páginasMateriales Capitulo01 PDFGabriel Alfonso Ponce JulcaAún no hay calificaciones
- FUNDICIONDocumento18 páginasFUNDICIONGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Term Odin A MicaDocumento16 páginasTerm Odin A MicaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Problema de La Etica 2Documento12 páginasProblema de La Etica 2Gabriel Alfonso Ponce JulcaAún no hay calificaciones
- El Problema de La EticaDocumento7 páginasEl Problema de La EticaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Trabajo de EstaticaDocumento19 páginasTrabajo de EstaticaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Cambio Climático y AgriculturaDocumento14 páginasCambio Climático y AgriculturaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- El Problema de La EticaDocumento8 páginasEl Problema de La EticaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Manual PL7Documento464 páginasManual PL7espinete89100% (1)
- APLICACIONESDocumento7 páginasAPLICACIONESGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Cambio Climático y AgriculturaDocumento14 páginasCambio Climático y AgriculturaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- El Problema de La EticaDocumento8 páginasEl Problema de La EticaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- COMUNICADODocumento1 páginaCOMUNICADOGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Circuitos TrifasicosDocumento3 páginasCircuitos TrifasicosGabriel Alfonso Ponce JulcaAún no hay calificaciones
- 4 ModeloControl-Calidad PDFDocumento12 páginas4 ModeloControl-Calidad PDFGabriel Alfonso Ponce JulcaAún no hay calificaciones
- 4 ModeloControl-Calidad PDFDocumento12 páginas4 ModeloControl-Calidad PDFGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Ciencia en La Ingenieria MecatronicaDocumento5 páginasCiencia en La Ingenieria MecatronicaGabriel Alfonso Ponce JulcaAún no hay calificaciones
- Precios Electricaribe Venta 2016Documento3 páginasPrecios Electricaribe Venta 2016Alberto Murillo PadillaAún no hay calificaciones
- Clase 4. Medidas de Resumen de Datos. Diseño ExperimentalDocumento24 páginasClase 4. Medidas de Resumen de Datos. Diseño ExperimentalBrilliAguilarAún no hay calificaciones
- Estudio de Fuentes de AguaDocumento15 páginasEstudio de Fuentes de AguaEdisonAún no hay calificaciones
- Refuerzo Inglés 2ºESO 08-09Documento49 páginasRefuerzo Inglés 2ºESO 08-09DanielAún no hay calificaciones
- EXCEPCIONESDocumento1 páginaEXCEPCIONESBryan Leonel MoralesAún no hay calificaciones
- Nivel IV - TP Nro 5 - Laminas Sinclasticas - Paraboloide Eliptico PDFDocumento8 páginasNivel IV - TP Nro 5 - Laminas Sinclasticas - Paraboloide Eliptico PDFRASTAFARIAún no hay calificaciones
- Impacto de La Tecnología en La MedicinaDocumento6 páginasImpacto de La Tecnología en La Medicinaxavier fonAún no hay calificaciones
- Catalogo de ProductosDocumento130 páginasCatalogo de ProductosAlvaro ChoqueAún no hay calificaciones
- Manual de Uso - Sistema Punto de Venta RhinoDocumento8 páginasManual de Uso - Sistema Punto de Venta Rhinobasculas y equiposAún no hay calificaciones
- Informe de Reconocimiento de Materiales Laboratorio de EdafologiaDocumento15 páginasInforme de Reconocimiento de Materiales Laboratorio de EdafologiaFlorChacpiMendoza50% (4)
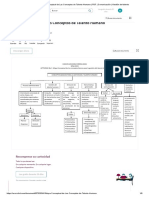
- Mapa Conceptual de Los Conceptos de Talento HumanoDocumento6 páginasMapa Conceptual de Los Conceptos de Talento HumanoMarianna Mercado MejiaAún no hay calificaciones
- ExamenDocumento21 páginasExamenJuan Alonso Leandro NuñezAún no hay calificaciones
- Prueba Biologia c2 1 Medio DifDocumento3 páginasPrueba Biologia c2 1 Medio DifMarce SMAún no hay calificaciones
- DOLAN y PARETS 2016 Redefining The Axiom of Story - The VR and 360 Video Complex - En.esDocumento10 páginasDOLAN y PARETS 2016 Redefining The Axiom of Story - The VR and 360 Video Complex - En.esVeronica Navarro CorbiAún no hay calificaciones
- Ensayo ConsumismoDocumento6 páginasEnsayo ConsumismoKenny AlarconAún no hay calificaciones
- PI-GE-011 Identificacion y Evaluacion de Impactos AmbientalesDocumento16 páginasPI-GE-011 Identificacion y Evaluacion de Impactos AmbientalesJ.L. GomezAún no hay calificaciones
- Resumen de Actas Mayo 2021.Documento4 páginasResumen de Actas Mayo 2021.Mayra TtitoAún no hay calificaciones
- Busqueda Dispersa Aplicada Al Problema de Ruteo de Vehículos Con Colecta y Entrega SimultaneaDocumento10 páginasBusqueda Dispersa Aplicada Al Problema de Ruteo de Vehículos Con Colecta y Entrega SimultaneaErnestoAún no hay calificaciones
- Termodinamica IntroducciónDocumento9 páginasTermodinamica IntroducciónrolyAún no hay calificaciones
- TallerDocumento8 páginasTallerKimberly TusaAún no hay calificaciones
- 6 Sigma TareaDocumento11 páginas6 Sigma TareaTony Orphic DatfAún no hay calificaciones
- Elaboracion de Perfiles EstructuralesDocumento8 páginasElaboracion de Perfiles EstructuralesPaty TrigoAún no hay calificaciones
- Taller de Reflexión Semana SantaDocumento2 páginasTaller de Reflexión Semana SantaMasa FelipeAún no hay calificaciones
- Ejercicios Interés Simple (1 A 3 y 12 A 16)Documento8 páginasEjercicios Interés Simple (1 A 3 y 12 A 16)Noel Suarez100% (1)
- Instantáneas - Silvia SchujerDocumento4 páginasInstantáneas - Silvia SchujerJohanna RaduskyAún no hay calificaciones