También podría gustarte
- Diseño Estructural de Galera para DepositoDocumento47 páginasDiseño Estructural de Galera para Depositoortean100% (3)
- Apu Obras ProvisionalesDocumento16 páginasApu Obras ProvisionalesYsaac CutipaAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Unidad 2 Metodo de Las FlexibilidadesDocumento15 páginasUnidad 2 Metodo de Las FlexibilidadesMayo Diaz NicolasaAún no hay calificaciones
- U2 Ejercicios Leyes Newton1Documento5 páginasU2 Ejercicios Leyes Newton1MrDavs100% (3)
- Comparacion Entre Rigidez y FlexibilidadDocumento18 páginasComparacion Entre Rigidez y FlexibilidadAlejandra Briones MartinezAún no hay calificaciones
- Guia de Porcentaje 3Documento5 páginasGuia de Porcentaje 3Aracely Garrido UrrutiaAún no hay calificaciones
- Velocidades Recomendadas en TuberiasDocumento3 páginasVelocidades Recomendadas en TuberiasEric Toro100% (1)
- Resistencia de Materiales2013Documento830 páginasResistencia de Materiales2013pablopasqualini1850% (2)
- Método Pendiente DeflexiónDocumento19 páginasMétodo Pendiente DeflexiónJose Antonio Liberon Vazques75% (4)
- RIGIDEZDocumento16 páginasRIGIDEZYanitzaAún no hay calificaciones
- Proyecto Fisica para Arquitectura: Techos VerdesDocumento26 páginasProyecto Fisica para Arquitectura: Techos VerdesLuciana AguilarAún no hay calificaciones
- Prueba de Historia Puntos CardinalesDocumento3 páginasPrueba de Historia Puntos CardinalesMelina Soledad Nuñez MuñozAún no hay calificaciones
- U2 - Introducción Al Cálculo Matricial - Grados de Indeterminación y Método de La FlexibilidadDocumento48 páginasU2 - Introducción Al Cálculo Matricial - Grados de Indeterminación y Método de La FlexibilidadJeremy Chavez CerronAún no hay calificaciones
- de La Sesión 1 Analisis Estructural IiDocumento30 páginasde La Sesión 1 Analisis Estructural IiDIEGO ALEXANDER REQUENA PERALTAAún no hay calificaciones
- 07 Metodos Matriciales IndirectosDocumento16 páginas07 Metodos Matriciales IndirectosNils MeyerAún no hay calificaciones
- Analisis Comparativo Entre El Metodo Pendiente de Formacion y El Metodo de RigidezDocumento26 páginasAnalisis Comparativo Entre El Metodo Pendiente de Formacion y El Metodo de RigidezNelson SolisAún no hay calificaciones
- T-05. Deformación Axial de Barras en Sistemas Estáticamente Indeterminados. 21 - 06 - 2022Documento33 páginasT-05. Deformación Axial de Barras en Sistemas Estáticamente Indeterminados. 21 - 06 - 2022Albert CarrizalesAún no hay calificaciones
- Armaduras HiperestáticasDocumento8 páginasArmaduras HiperestáticasAdrian JBrg0% (1)
- HIPERESTATICADocumento8 páginasHIPERESTATICAMisael GómezAún no hay calificaciones
- Analisis de Vigas Con Rotulas. Analisis Matricial de Vigas Con Seccion VariableDocumento32 páginasAnalisis de Vigas Con Rotulas. Analisis Matricial de Vigas Con Seccion Variable01-IC-HU-CRISTOPPER YUDER HUAMAN CARDENASAún no hay calificaciones
- Flexibilidad y RigidezDocumento13 páginasFlexibilidad y RigidezErickAún no hay calificaciones
- Metodos de La FlexibilidadDocumento30 páginasMetodos de La Flexibilidadeguilia664455Aún no hay calificaciones
- Método de Los DesplazamientosDocumento8 páginasMétodo de Los DesplazamientosMayke OchoaAún no hay calificaciones
- Método de Las Fuerzas.Documento75 páginasMétodo de Las Fuerzas.Pablo Santos100% (1)
- Elementos FinitosDocumento9 páginasElementos FinitosCristobal CaroAún no hay calificaciones
- Informe Analisis MetodosDocumento53 páginasInforme Analisis Metodosnilson mesias torres julianAún no hay calificaciones
- Apuntes de ClaseDocumento80 páginasApuntes de ClaseClaudiaAún no hay calificaciones
- Analisis MatricialDocumento11 páginasAnalisis MatricialClorinda Capristan LaraAún no hay calificaciones
- Hillary Zayas - Asignacion2.Desplazamientos.Documento5 páginasHillary Zayas - Asignacion2.Desplazamientos.Hillary ZayasAún no hay calificaciones
- U5.2 Vibraciones MecanicasDocumento24 páginasU5.2 Vibraciones MecanicasJose Guillermo RodilesAún no hay calificaciones
- EQWEQWEQDocumento15 páginasEQWEQWEQADPAún no hay calificaciones
- Metodo de RigidezDocumento20 páginasMetodo de RigidezZorro MeregildoAún no hay calificaciones
- Trabajo IV Corte de Jefersson Lárez EstructuraDocumento18 páginasTrabajo IV Corte de Jefersson Lárez EstructuraFreddy JoséAún no hay calificaciones
- Regresion Lineal SimpleDocumento54 páginasRegresion Lineal SimpleKarl CorreaAún no hay calificaciones
- Expo de ResiDocumento14 páginasExpo de Resirony roel huaraca moralesAún no hay calificaciones
- Teoria Hardy CrossDocumento9 páginasTeoria Hardy CrossGiomar Ozaita100% (1)
- Análisis Informe Analisis Metodos FinalDocumento57 páginasAnálisis Informe Analisis Metodos FinalyimmmmiAún no hay calificaciones
- 03 Principio de Los Trabajos VirtualesDocumento20 páginas03 Principio de Los Trabajos Virtualeslromero223Aún no hay calificaciones
- Clase 04 Método de La FlexibilidadDocumento18 páginasClase 04 Método de La Flexibilidadmarlon llanos basurtoAún no hay calificaciones
- Semana 01 - Tarea 01- GrupalDocumento5 páginasSemana 01 - Tarea 01- GrupalPamela ToapantaAún no hay calificaciones
- Calculo de MatrizDocumento7 páginasCalculo de Matrizjorge25_aguila2832Aún no hay calificaciones
- Estructura 2 Trabajo 1Documento21 páginasEstructura 2 Trabajo 1georginaAún no hay calificaciones
- Cap.1. Deflexiones en Vigas Métodos ClásicosDocumento30 páginasCap.1. Deflexiones en Vigas Métodos ClásicosRobinson Alberto Morales GarciaAún no hay calificaciones
- Oscilaciones CreoDocumento12 páginasOscilaciones Creoelbartoreal5Aún no hay calificaciones
- Resumen DinamicaDocumento7 páginasResumen DinamicaFrancis AlsinaAún no hay calificaciones
- Estabilidad e HiperestaticidadDocumento10 páginasEstabilidad e Hiperestaticidadroyer_capricornioAún no hay calificaciones
- U.T. N°1a - Teoría de La ElasticidadDocumento66 páginasU.T. N°1a - Teoría de La ElasticidadLuchoisapAún no hay calificaciones
- Método de Flexibilidad-CompletoDocumento22 páginasMétodo de Flexibilidad-Completoramirezcivil92Aún no hay calificaciones
- Trabajo Colavorativo - Analisis Estructural Ii.Documento12 páginasTrabajo Colavorativo - Analisis Estructural Ii.AARONAún no hay calificaciones
- Metodos para El Calculo de PorticosDocumento8 páginasMetodos para El Calculo de PorticosEdinson Aguirre MonteroAún no hay calificaciones
- Marco Teórico Practica Ley de HokkeDocumento5 páginasMarco Teórico Practica Ley de HokkeLuis Loreto GuerreroAún no hay calificaciones
- Trabajo de Estructuras IDocumento19 páginasTrabajo de Estructuras ILiudmarian DuranAún no hay calificaciones
- Estructura II. Metodo de Cross.Documento10 páginasEstructura II. Metodo de Cross.Diana BenitezAún no hay calificaciones
- InformeDocumento14 páginasInformeHenry MorningsideAún no hay calificaciones
- Metodos de Determinacion de La FlexibilidadDocumento11 páginasMetodos de Determinacion de La Flexibilidad05-ES-HU-DIEGO JESUS ORDOÑEZ RODRIGUEZAún no hay calificaciones
- Ley de HookeDocumento8 páginasLey de HookezamaxxAún no hay calificaciones
- Qué Es El Método de Las FlexibilidadesDocumento3 páginasQué Es El Método de Las FlexibilidadesnayeliAún no hay calificaciones
- AmedDocumento3 páginasAmedSaul VizcayaAún no hay calificaciones
- Investigacion Metodo Matricial en MarcosDocumento7 páginasInvestigacion Metodo Matricial en MarcosXavier De SantosAún no hay calificaciones
- Semana 4Documento33 páginasSemana 4Henry MoraAún no hay calificaciones
- Ingenieria Sismica: INCI - 307Documento33 páginasIngenieria Sismica: INCI - 307Stefanie AbramonteAún no hay calificaciones
- Aplicación de Matrices y Sistemas Lineales en Problemas de Análisis de Estructuras.Documento20 páginasAplicación de Matrices y Sistemas Lineales en Problemas de Análisis de Estructuras.fernando.mitzui1226Aún no hay calificaciones
- Unidad 3. - Equilibrio deDocumento7 páginasUnidad 3. - Equilibrio deEmmanuel Marquez HernandezAún no hay calificaciones
- Trabajo 3 Metodo de FlexibilidadDocumento12 páginasTrabajo 3 Metodo de FlexibilidadElsami OsorioAún no hay calificaciones
- Analisis MatricialDocumento87 páginasAnalisis MatricialYeider Aguirre JimenezAún no hay calificaciones
- Encofrados TacnaDocumento8 páginasEncofrados TacnaYsaac CutipaAún no hay calificaciones
- Procedimiento de Diseño Sísmico de Columnas de Puentes Urbanos de Concreto ReforzadoDocumento24 páginasProcedimiento de Diseño Sísmico de Columnas de Puentes Urbanos de Concreto ReforzadoYsaac CutipaAún no hay calificaciones
- Elaboracion y Curado de Especimenes de ConcretoDocumento8 páginasElaboracion y Curado de Especimenes de ConcretoNoelLeonLopez100% (1)
- Chasis Retro Excavadora KomatsuDocumento17 páginasChasis Retro Excavadora KomatsuMR. Death AndradeAún no hay calificaciones
- Taller Qca 10 Nomenclatura 2Documento3 páginasTaller Qca 10 Nomenclatura 2EINEICER NARANJO CASTRILLÓNAún no hay calificaciones
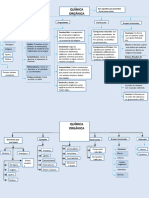
- Mapa Conceptual Quimica OrganicaDocumento3 páginasMapa Conceptual Quimica OrganicaTata HerreraAún no hay calificaciones
- Base S1Documento105 páginasBase S1rafaAún no hay calificaciones
- Las 10 Principales Recomendaciones para Implementaciones EtherNet - IP en Toda Una PlantaDocumento4 páginasLas 10 Principales Recomendaciones para Implementaciones EtherNet - IP en Toda Una PlantaRichard TineoAún no hay calificaciones
- Taller 03-GRUPO 5Documento8 páginasTaller 03-GRUPO 5Gerardo RojasAún no hay calificaciones
- SBPDocumento19 páginasSBPjonathanvalcarAún no hay calificaciones
- Quiz 2. Regresión Lineal Multiple - 6 de MarzoDocumento4 páginasQuiz 2. Regresión Lineal Multiple - 6 de MarzoAriadna UribeAún no hay calificaciones
- Introducción A La Bromatología Análisis BromatológicoDocumento3 páginasIntroducción A La Bromatología Análisis BromatológicoAnonymous 3eJ8qq3Aún no hay calificaciones
- aplicACIONES Sensores InductivosDocumento5 páginasaplicACIONES Sensores InductivosJanet Frutiks100% (1)
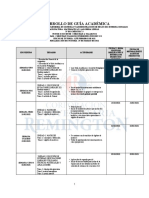
- Guia Academica Algebra LinealDocumento2 páginasGuia Academica Algebra LinealgfdgfgsAún no hay calificaciones
- La Dicotomia Metodologica Cualitativo-Cuantitativo. Genesis y Debate Actual.Documento7 páginasLa Dicotomia Metodologica Cualitativo-Cuantitativo. Genesis y Debate Actual.RobertoAún no hay calificaciones
- Historia Del TransistorDocumento2 páginasHistoria Del TransistorMarbel MarbelAún no hay calificaciones
- Electrotecnia AlternadoresDocumento8 páginasElectrotecnia AlternadoresEyker TorresAún no hay calificaciones
- Practica No.2Documento6 páginasPractica No.2Alexandra solanoAún no hay calificaciones
- Estandar de Marquillado Claro MW 303 ZTE - ANT - Los Salados-ANT - San PedroDocumento34 páginasEstandar de Marquillado Claro MW 303 ZTE - ANT - Los Salados-ANT - San PedroViejo Javi BohAún no hay calificaciones
- Curvado CañeriasDocumento3 páginasCurvado CañeriasMarcelo AguileraAún no hay calificaciones
- Ejercicios MatricesDocumento4 páginasEjercicios MatricesMaripih DiazAún no hay calificaciones
- Guía #8 - RepasoDocumento3 páginasGuía #8 - RepasoJavier RojasAún no hay calificaciones
- Mapa Del Peru CGDocumento33 páginasMapa Del Peru CGeberth17Aún no hay calificaciones
- Biologia 4Documento4 páginasBiologia 4GERALDINE MICHELLE GOMEZ CUESTAAún no hay calificaciones
- Estructuras RepetitivasDocumento20 páginasEstructuras RepetitivaszigyzAún no hay calificaciones
- AhorcadoDocumento6 páginasAhorcadoChristian TincoAún no hay calificaciones
- MEC Semana6 Sesion2 Ejercicios Propuestos - DinamicaDocumento3 páginasMEC Semana6 Sesion2 Ejercicios Propuestos - DinamicaScar OliveraAún no hay calificaciones