También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaAún no hay calificaciones
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
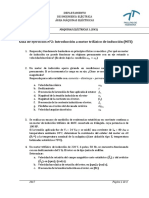
- Problemas de Máquinas Eléctricas IIDocumento26 páginasProblemas de Máquinas Eléctricas IIJulian Torre CarrascoAún no hay calificaciones
- Manual Instrucciones Mantenimiento Reductores MotorreductoresDocumento48 páginasManual Instrucciones Mantenimiento Reductores MotorreductoresMakliber100% (2)
- Proyecto Diseño de Una Red LanDocumento26 páginasProyecto Diseño de Una Red LanTETOMARTINEZAún no hay calificaciones
- Presentación WINDOWS 10Documento10 páginasPresentación WINDOWS 10Anonymous BgGgYyimCAún no hay calificaciones
- Practica de CiclohexanonaDocumento6 páginasPractica de CiclohexanonaEduardo Cruz VlzAún no hay calificaciones
- Tarea 4Documento28 páginasTarea 4Juan Bances Ramos100% (2)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Caso - ZaraDocumento4 páginasCaso - ZaraCarlos VegaAún no hay calificaciones
- Tratamiento Soluciones CianuracionDocumento24 páginasTratamiento Soluciones CianuracionWill070707Aún no hay calificaciones
- Calculo de La Potencia HidraulicaDocumento5 páginasCalculo de La Potencia HidraulicaJorge Luis Cervantes CarrilloAún no hay calificaciones
- Practica El Motor de Induccion de Rotor DevanadoDocumento12 páginasPractica El Motor de Induccion de Rotor DevanadoMauricioHuertaAún no hay calificaciones
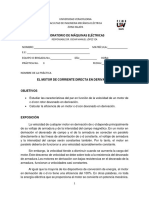
- Laboratorio #24 El Motor de CD en DerivacionDocumento7 páginasLaboratorio #24 El Motor de CD en DerivacionGerman Angel100% (1)
- Teoria Primera UnidadDocumento40 páginasTeoria Primera UnidadJavier Israel Guerrero67% (3)
- Taller 4Documento1 páginaTaller 4CamiloNogueraRiascosAún no hay calificaciones
- EE60 - Examen Parcial 16 - 2021-IDocumento2 páginasEE60 - Examen Parcial 16 - 2021-IC Condor LucchiniAún no hay calificaciones
- Proyecto Motor DCDocumento5 páginasProyecto Motor DCMarlon BoknegraAún no hay calificaciones
- Determinación de Los Parámetros Motor de Corriente Continua DCDocumento3 páginasDeterminación de Los Parámetros Motor de Corriente Continua DCNury GuevaraAún no hay calificaciones
- Lab 6 de Conversión2Documento16 páginasLab 6 de Conversión2Alejandro FigueroaAún no hay calificaciones
- Lab Maq Electricas 3 Caract Motor DC 2024-1Documento9 páginasLab Maq Electricas 3 Caract Motor DC 2024-1johanm.vivastAún no hay calificaciones
- Informe de Electrotecnia: Motor de Corriente Directa en DerivacioDocumento6 páginasInforme de Electrotecnia: Motor de Corriente Directa en DerivacioFernando ParedesAún no hay calificaciones
- Practica - 1 - Motor - DC 1Documento13 páginasPractica - 1 - Motor - DC 1TonyAngelAún no hay calificaciones
- Practica 3Documento6 páginasPractica 3Daniel Omar CorreaAún no hay calificaciones
- Expo #2 MaquinasDocumento60 páginasExpo #2 MaquinascecyAún no hay calificaciones
- PRACTICA3 Simulacion Control Velocidad Motor CC Mediante SimpowersystemDocumento13 páginasPRACTICA3 Simulacion Control Velocidad Motor CC Mediante SimpowersystemCristina Pérez MartínAún no hay calificaciones
- Modelado Matematico Motor DC PDFDocumento8 páginasModelado Matematico Motor DC PDFalejoyugchaAún no hay calificaciones
- LAB Guia Ejercicios 2 MTIDocumento4 páginasLAB Guia Ejercicios 2 MTIAlkoholik ManAún no hay calificaciones
- Modelado Matematico Motor DCDocumento8 páginasModelado Matematico Motor DCJoeWeider100% (1)
- Proyecto FinalDocumento5 páginasProyecto FinalSteven OrdoñezAún no hay calificaciones
- DDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalDocumento10 páginasDDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalJosé Daniel Martínez RuizAún no hay calificaciones
- 2do Parcial Definitvo Maquinas Electricas 1Documento2 páginas2do Parcial Definitvo Maquinas Electricas 1Carlos PerdomoAún no hay calificaciones
- Determinacion de Parametros de Motor CC SerieDocumento41 páginasDeterminacion de Parametros de Motor CC SerieDiego Perez Farge100% (7)
- Ejercicios MaquinariasIIDocumento58 páginasEjercicios MaquinariasIIHolguer NoriegaAún no hay calificaciones
- ALUMNO Guía 11 Ensayo de MáquinasDocumento8 páginasALUMNO Guía 11 Ensayo de MáquinasPablo Pablo Pablinho Pabloso100% (1)
- Ejercicios FinalesDocumento9 páginasEjercicios FinalesRobertLopezFudoAún no hay calificaciones
- Prac 03 El Motor de Corriente Directa en DerivacionDocumento7 páginasPrac 03 El Motor de Corriente Directa en DerivacionMiriam SanchezAún no hay calificaciones
- Calculo Impedancias de Secuencia PDFDocumento10 páginasCalculo Impedancias de Secuencia PDFjanpol_uniAún no hay calificaciones
- Estabilidad Sistemas Electricos de Potencia PDFDocumento25 páginasEstabilidad Sistemas Electricos de Potencia PDFJuan Camilo Rivera MayaAún no hay calificaciones
- Característica Mecánica PDFDocumento4 páginasCaracterística Mecánica PDFhierromovilAún no hay calificaciones
- Nótese Que en Este Diagrama de Bloques El Controlador y Actuador No Tienen Elemento en El Circuito Por Ser Parte de La Primera EntregaDocumento8 páginasNótese Que en Este Diagrama de Bloques El Controlador y Actuador No Tienen Elemento en El Circuito Por Ser Parte de La Primera EntregaRoberto CastilloAún no hay calificaciones
- Curvas V-GuiaDocumento7 páginasCurvas V-Guiaalbaropernalete19_80Aún no hay calificaciones
- Práctica 5Documento10 páginasPráctica 5Jorge CortésAún no hay calificaciones
- Entregable 3. ConversionDocumento16 páginasEntregable 3. ConversionMarialeCuestas02Aún no hay calificaciones
- Práctica5 ModeladoDocumento12 páginasPráctica5 ModeladoCarlos Valdez VillaAún no hay calificaciones
- Inacap Máquinas - AsincrónicasDocumento8 páginasInacap Máquinas - AsincrónicasTamara HernándezAún no hay calificaciones
- CINEMÁTICA - Cuaderno ProblemasDocumento89 páginasCINEMÁTICA - Cuaderno ProblemasquiquesxAún no hay calificaciones
- Tarea4 Elo386Documento6 páginasTarea4 Elo386Bernardo FariasAún no hay calificaciones
- Banda TransportadoraDocumento14 páginasBanda Transportadorastrikerluis13Aún no hay calificaciones
- Fundamento MimorDocumento18 páginasFundamento MimorEtzel UgarteAún no hay calificaciones
- Cuaderno ProblemasDocumento90 páginasCuaderno ProblemasenzogsAún no hay calificaciones
- Preinforme 1Documento3 páginasPreinforme 1meistehaft270Aún no hay calificaciones
- Laboratorio 6 - El Motor DCDocumento9 páginasLaboratorio 6 - El Motor DCLlaguento De La Cruz LuisAún no hay calificaciones
- Parametros de Un Motor MonofasicoDocumento6 páginasParametros de Un Motor Monofasicoたましろ あきらAún no hay calificaciones
- Lab.6 Grupo A 2Documento8 páginasLab.6 Grupo A 2Martinelis JaenAún no hay calificaciones
- Informe 1-Mesa 2Documento9 páginasInforme 1-Mesa 2Johnn NarváezAún no hay calificaciones
- Motor de Rotor DevanadoDocumento8 páginasMotor de Rotor DevanadoChristopher Andres Perez BeltranAún no hay calificaciones
- Practica Motor Asincrono TrifasicoDocumento14 páginasPractica Motor Asincrono TrifasicoLope Nelson Aguirre GomezAún no hay calificaciones
- Motor de Rotor DevanadoDocumento7 páginasMotor de Rotor DevanadoChristopher Andres Perez BeltranAún no hay calificaciones
- Experiencia 1Documento16 páginasExperiencia 1meistehaft270Aún no hay calificaciones
- Frenado de Maquinas Asincrónicas: Asignación Nro. 2Documento21 páginasFrenado de Maquinas Asincrónicas: Asignación Nro. 2Luis MogollónAún no hay calificaciones
- Rotor DevanadoDocumento7 páginasRotor DevanadoDavid MolinaAún no hay calificaciones
- Proyectos Control 2019Documento12 páginasProyectos Control 2019Jorge Alberto Palacios100% (1)
- Sistemas ElectromecánicosDocumento3 páginasSistemas ElectromecánicosJulio MuroAún no hay calificaciones
- Traducción BalancínDocumento6 páginasTraducción BalancínMisael Fernando Gamba GomezAún no hay calificaciones
- Prueba de Aislamiento Del Cable de Alta TensiónDocumento3 páginasPrueba de Aislamiento Del Cable de Alta TensiónJairo GusquiAún no hay calificaciones
- Onix - Grupo 03Documento24 páginasOnix - Grupo 03Anayka Mirella Pastor RodriguezAún no hay calificaciones
- Disipadores de Energía-Trabajo Completo en EspañolDocumento27 páginasDisipadores de Energía-Trabajo Completo en EspañolÁnikka Quevedo GarcíaAún no hay calificaciones
- GNS3 + Putty + SecureCRT + SDM - Taringa!Documento5 páginasGNS3 + Putty + SecureCRT + SDM - Taringa!webpcnetlinkAún no hay calificaciones
- T A01t8 PDFDocumento3 páginasT A01t8 PDFLeonardo Ramirez GuzmanAún no hay calificaciones
- Manuel Prado UgartecheDocumento15 páginasManuel Prado UgartecheJuan Ricardo Davila BuendiaAún no hay calificaciones
- Para Desarrollar S13-1 Ruta Corta Sdes 1Documento10 páginasPara Desarrollar S13-1 Ruta Corta Sdes 1Yanila Portella RiveraAún no hay calificaciones
- Clasificación de Los Materiales de ConstrucciónDocumento6 páginasClasificación de Los Materiales de ConstrucciónDavid Ramirez BarreraAún no hay calificaciones
- Reporte de Incidentes - ComentariosDocumento5 páginasReporte de Incidentes - ComentariosdavidcantoAún no hay calificaciones
- Sistemas Artificiales de ProduccionDocumento3 páginasSistemas Artificiales de ProduccionUzziel De jesus OsorioAún no hay calificaciones
- Guarino Plan de OrdenamientoDocumento399 páginasGuarino Plan de OrdenamientoYasir Saa PerezAún no hay calificaciones
- Cálculo Del Coeficiente de Difusión de Mezclas Binarias Gaseosa para Sistemas A Baj As PresionesDocumento7 páginasCálculo Del Coeficiente de Difusión de Mezclas Binarias Gaseosa para Sistemas A Baj As PresionescamilodomesaAún no hay calificaciones
- Contenido de Tif 2 Electrotecnia IndustrialDocumento13 páginasContenido de Tif 2 Electrotecnia IndustrialSolansh Arlet Ledezma PazAún no hay calificaciones
- HidrocompresoresDocumento22 páginasHidrocompresoresRafael SamaniegoAún no hay calificaciones
- Importancia de Los Costos en El Area de La ConstruccionDocumento5 páginasImportancia de Los Costos en El Area de La ConstruccionToño M. Flores100% (1)
- Cuestionario 15 Manufactura Ingenieria y TecnologiaDocumento5 páginasCuestionario 15 Manufactura Ingenieria y TecnologiaMatías Pacheco100% (1)
- 3011-1 of 2007Documento34 páginas3011-1 of 2007MARCOSAún no hay calificaciones
- Planificación Microcurricular de ElectricidadDocumento6 páginasPlanificación Microcurricular de ElectricidadCris LopezAún no hay calificaciones
- Filtro ImplementadoDocumento2 páginasFiltro ImplementadoAlicia Izquierdo HernandezAún no hay calificaciones
- Manual Verifone Vx520 Vx680GPRSDocumento11 páginasManual Verifone Vx520 Vx680GPRSKarinaOliveraAún no hay calificaciones
- Sistema de RefrigeracionDocumento8 páginasSistema de RefrigeracionemanuelAún no hay calificaciones