También podría gustarte
- Resumen de Los 3 Articulos PATIÑODocumento2 páginasResumen de Los 3 Articulos PATIÑOGabo GabitoAún no hay calificaciones
- Informe Detallado 24 Feb 2014Documento1 páginaInforme Detallado 24 Feb 2014Gabo GabitoAún no hay calificaciones
- Listado AsistentesDocumento1 páginaListado AsistentesGabo GabitoAún no hay calificaciones
- En Caso de Ser Admitido para Efectuar Su Liquidación de Matrícula PDFDocumento3 páginasEn Caso de Ser Admitido para Efectuar Su Liquidación de Matrícula PDFGabo GabitoAún no hay calificaciones
- Tanino SDocumento25 páginasTanino SGabo Gabito100% (1)
- Diagrama de BloquesDocumento1 páginaDiagrama de BloquesGabo GabitoAún no hay calificaciones
- Encuesta Salchichon VegetarianoDocumento1 páginaEncuesta Salchichon VegetarianoGabo GabitoAún no hay calificaciones
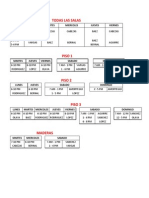
- Todas Las Salas PDFDocumento1 páginaTodas Las Salas PDFGabo GabitoAún no hay calificaciones
- Listado AsistentesDocumento1 páginaListado AsistentesGabo GabitoAún no hay calificaciones
- El País Más Fiestero Del MundoDocumento4 páginasEl País Más Fiestero Del MundoGabo GabitoAún no hay calificaciones
- Plan Nuevo Ing. de SistemasDocumento1 páginaPlan Nuevo Ing. de SistemasGabo GabitoAún no hay calificaciones
- Sobre LácteosDocumento1 páginaSobre LácteosGabo GabitoAún no hay calificaciones
- Horario I SemestreDocumento2 páginasHorario I SemestreGabo GabitoAún no hay calificaciones
- AngelaDocumento2 páginasAngelaGabo GabitoAún no hay calificaciones
- Trabajo L1Documento2 páginasTrabajo L1Gabo GabitoAún no hay calificaciones
- Postobon Direccionamiento EstrategicoDocumento7 páginasPostobon Direccionamiento EstrategicoGabo Gabito100% (1)
- Acuerdo Pedagógico Ética y ValoresDocumento3 páginasAcuerdo Pedagógico Ética y ValoresGabo GabitoAún no hay calificaciones
- Andres MeloDocumento4 páginasAndres MeloGabo GabitoAún no hay calificaciones
- Andres MeloDocumento4 páginasAndres MeloGabo GabitoAún no hay calificaciones
- PKG Mayor 4GBDocumento1 páginaPKG Mayor 4GBGabo GabitoAún no hay calificaciones
- 2 Manual Matriculación de CursosDocumento4 páginas2 Manual Matriculación de CursosGabo GabitoAún no hay calificaciones
- Actividad Didactia Salto de La RanaDocumento4 páginasActividad Didactia Salto de La RanaGabo GabitoAún no hay calificaciones
- 2 - Cultivo de Tejidos VegetalesDocumento19 páginas2 - Cultivo de Tejidos VegetalesGabo GabitoAún no hay calificaciones
- Horario A-2013 FinalDocumento13 páginasHorario A-2013 FinalGabo GabitoAún no hay calificaciones
- La Movilidad Del Transporte Pblico y PrivadoDocumento9 páginasLa Movilidad Del Transporte Pblico y PrivadoGabo GabitoAún no hay calificaciones
- Punto Nuemo5 RiegosDocumento2 páginasPunto Nuemo5 RiegosGabo GabitoAún no hay calificaciones
- Correc DidaDocumento21 páginasCorrec DidaGabo GabitoAún no hay calificaciones
- Mecanismos Clase 1 2011 IntroducciónDocumento23 páginasMecanismos Clase 1 2011 IntroducciónCesar Armando LanzAún no hay calificaciones
- Ajuste Lucas Peugeot 1.9Documento2 páginasAjuste Lucas Peugeot 1.9jose luisAún no hay calificaciones
- Electricidad - Electronica de Motos PDFDocumento24 páginasElectricidad - Electronica de Motos PDFJuan SebastiánAún no hay calificaciones
- Caja de VelocidadesDocumento36 páginasCaja de VelocidadesDavid FeikAún no hay calificaciones
- Impri Mir Program A Anal I TicoDocumento10 páginasImpri Mir Program A Anal I TicoJohnsh VldmAún no hay calificaciones
- Catálogo de CilindrosDocumento14 páginasCatálogo de CilindrosJOSEAún no hay calificaciones
- 5.1 - 797 F Sistema Hidráulico Del Mando Del VentiladorDocumento14 páginas5.1 - 797 F Sistema Hidráulico Del Mando Del VentiladorChristian Perez100% (1)
- PIC Reloj Digital Con AlarmaDocumento12 páginasPIC Reloj Digital Con AlarmaMaster MonomasAún no hay calificaciones
- Circuito de ElevaciónDocumento17 páginasCircuito de ElevaciónThomas BravoAún no hay calificaciones
- Formulario de Registro de Actividades Semanales IDocumento1 páginaFormulario de Registro de Actividades Semanales IDieguito GutierrezAún no hay calificaciones
- proyecto1y2OPERACIONES DE MECANIZADO EN TORNO Limber Ramiro Flores MachicadoDocumento16 páginasproyecto1y2OPERACIONES DE MECANIZADO EN TORNO Limber Ramiro Flores MachicadoLimberAún no hay calificaciones
- Reles TemporizadoresDocumento7 páginasReles Temporizadoreskevin herreras muchaAún no hay calificaciones
- Informe 01 Motores de Combustion InternaDocumento36 páginasInforme 01 Motores de Combustion InternaJosePeñaTorresAún no hay calificaciones
- Cambio RavigneauxDocumento5 páginasCambio RavigneauxMariano EscuerAún no hay calificaciones
- Diagramas Del MotorDocumento27 páginasDiagramas Del MotorJuan LlancapanAún no hay calificaciones
- Cuaderno de InformesDocumento10 páginasCuaderno de InformesJesus BaldeonAún no hay calificaciones
- Ensamble de MotorDocumento5 páginasEnsamble de MotorJESUS CATALINOAún no hay calificaciones
- Objetivo Holistico: Piezas MóvilesDocumento7 páginasObjetivo Holistico: Piezas MóvilesalfredoAún no hay calificaciones
- SobadoraDocumento11 páginasSobadoraJose y CaroAún no hay calificaciones
- Silabo Motores Otto 2017-IDocumento4 páginasSilabo Motores Otto 2017-IJ.ENRIQUEZ.BAún no hay calificaciones
- Tabla FallosDocumento2 páginasTabla FallosAlberto Valdez Alvarado100% (1)
- Catalogo Petool Con PreciosDocumento300 páginasCatalogo Petool Con PreciosMauricio Berrocal AltamiranoAún no hay calificaciones
- Mecánica Diesel Volumen 20 Tubería de Alta Presión PDFDocumento53 páginasMecánica Diesel Volumen 20 Tubería de Alta Presión PDFZtaly Dar NrsthAún no hay calificaciones
- PC4000 Slew ManualDocumento3 páginasPC4000 Slew ManualchinyeneAún no hay calificaciones
- PC1 - TurbomaquinasDocumento15 páginasPC1 - TurbomaquinasKennedy Vargas MarceloAún no hay calificaciones
- Mantenimiento de 4000 Hrs A Montacargas de Combustión de 15000 LbsDocumento29 páginasMantenimiento de 4000 Hrs A Montacargas de Combustión de 15000 LbsPabloo QuintanaAún no hay calificaciones
- Manual - 1633829 - (B214e) - H-Om-Uk-Es - (12-2009)Documento152 páginasManual - 1633829 - (B214e) - H-Om-Uk-Es - (12-2009)MARIA SOLEDAD MANCHENOAún no hay calificaciones
- Manual de Taller Kangoo PDFDocumento981 páginasManual de Taller Kangoo PDFJOSEALBERICH100% (10)
- Torno TH 4615 DDocumento3 páginasTorno TH 4615 DJorge MallmaAún no hay calificaciones
- Tarea5 TermodinamicaDocumento11 páginasTarea5 TermodinamicaAlexis Artys BullaAún no hay calificaciones
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Introducción a las ecuaciones de la física matemáticaDe EverandIntroducción a las ecuaciones de la física matemáticaCalificación: 5 de 5 estrellas5/5 (4)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Universo cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.De EverandUniverso cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.Aún no hay calificaciones
- Convertidores conmutados de potencia: Test de autoevaluaciónDe EverandConvertidores conmutados de potencia: Test de autoevaluaciónCalificación: 5 de 5 estrellas5/5 (1)
- Chernóbil: La catástrofe nuclear que impactó al mundo enteroDe EverandChernóbil: La catástrofe nuclear que impactó al mundo enteroCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Aventuras de un duende en el mundo de las matemáticasDe EverandAventuras de un duende en el mundo de las matemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Conceptos básicos de electricidad y magnetismoDe EverandConceptos básicos de electricidad y magnetismoCalificación: 5 de 5 estrellas5/5 (2)
- Enredo cuántico e inconsciente colectivo. Física y metafísica del universo. Nuevas interpretacionesDe EverandEnredo cuántico e inconsciente colectivo. Física y metafísica del universo. Nuevas interpretacionesCalificación: 5 de 5 estrellas5/5 (1)
- La teoría de juegos: El arte del pensamiento estratégicoDe EverandLa teoría de juegos: El arte del pensamiento estratégicoCalificación: 4.5 de 5 estrellas4.5/5 (2)