Unidad de Medida Inercial.
Algoritmo de Estimacin e Implementacin Software Desarrollo terico
Captulo 2.
Desarrollo terico
2.1. Representacin matemtica de la orientacin
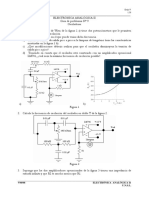
Dado que el objetivo es expresar la orientacin del sensor con respecto a un marco de referencia fijo, se expone en primer lugar cmo se representa esto matemticamente. Partiendo de unos ejes coordenados que representarn el sistema de referencia de la IMU, las rotaciones respecto a estos ejes provocarn el cambio en la orientacin del objeto. Se definen este marco de referencia y las rotaciones en sentido positivo de la siguiente forma:
Ilustracin 2-1. Definicin de ejes y rotaciones
Es importante recordar que el cambio en la orientacin del objeto, que est sujeto a una serie de rotaciones sobre los diferentes ejes, no es slo una funcin de los ngulos que rota cada uno de estos ejes, sino tambin del orden en que ocurren las rotaciones. 29
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
Existen varias representaciones matemticas para definir la orientacin del objeto respecto al sistema de referencia. Estos se describen a continuacin: Matriz de rotacin: La matriz de rotacin, o DCM (del ingls Direction Cosine Matrix), es una matriz 3x3, cuyas columnas representan los vectores unidad del objeto proyectados sobre los ejes del sistema de referencia. ngulos RPY y ngulos de Euler: Una transformacin de un marco coordinado a otro se define por tres rotaciones sucesivas sobre los diferentes ejes. Los ngulos roll, pitch y yaw representan las tres rotaciones sobre los ejes X, Y y Z, respectivamente. Los ngulos de Euler son una representacin similar, cambiando los ejes sobre los que se realizan las rotaciones y el orden en que se tienen en cuenta. Cuaterniones: Otra forma de entender la rotacin es considerarla como una nica rotacin sobre un vector definido en el marco de referencia. El cuaternin es un vector tetradimensional, cuyos elementos son funcin de este vector y de la magnitud de la rotacin.
2.1.1. Matriz de rotacin
La matriz de rotacin relaciona el sistema de referencia fijo con el del objeto de forma que se puede expresar un vector del sistema asociado al objeto en el sistema fijo, simplemente premultiplicndolo por la matriz de rotacin correspondiente.
A De esta forma, siendo RB la matriz de rotacin del objeto respecto al sistema r r fijo, y r A y r B vectores expresados en el sistema fijo y del objeto, respectivamente, se tiene:
r r r Ar A r A = RB r B ; r B = ( RB ) T r A
Los elementos de la matriz de rotacin son
r11 R = r21 r31
A B
r12 r22 r32
r13 r23 r33
siendo rij el coseno del ngulo entre el eje i del sistema de referencia fijo y el eje j del sistema de referencia del objeto.
30
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
2.1.2. ngulos RPY y ngulos de Euler
Al igual que para navegacin en el plano slo se necesita un ngulo de orientacin (tpicamente el Norte), en el espacio la orientacin se puede expresar con tres ngulos. Los ngulos RPY son roll, pitch y yaw, que en terminologa nutica se corresponderan con alabeo, cabeceo y guiada. En funcin de estos ngulos, expresar la orientacin de un objeto con un sistema de referencia {B} con respecto a un sistema de referencia {A} corresponde a realizar las operaciones siguientes: se parte con {B} coincidente con {A}, se rota {B} alrededor de X un ngulo (roll), despus alrededor de Y un ngulo
A A
(pitch) y finalmente alrededor de Z A un ngulo (yaw).. En la representacin de Euler Z-Y-X, en lugar de realizar tres rotaciones consecutivas alrededor de los ejes del sistema de referencia {A}, las rotaciones se efectan alrededor de los ejes del sistema {B} solidario al cuerpo. Primero se rota un ngulo alrededor de Z , luego alrededor del Y resultante del primer giro, y
B B
posteriormente se rota un ngulo alrededor del eje X B . Los ngulos de Euler Z-Y-Z se obtienen de realizar rotaciones parecidas a las anteriores. En este caso tambin se rota con respecto a {B}, pero el orden de las rotaciones ahora es Z-Y-Z.
2.1.3. Cuaterniones
La representacin de la orientacin mediante cuaterniones es una representacin de cuatro parmetros basada en la idea de que una transformacin de un sistema de referencia a otro puede ser efectuada por una nica rotacin sobre un r r vector definido en el sistema de referencia fijo. El cuaternin, q , es un vector de cuatro elementos que son funcin de este vector y de la magnitud de la rotacin:
cos( / 2) a b ( / ) sen( / 2) r q= = x c ( y / ) sen( / 2) d ( z / ) sen( / 2)
31
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
r donde x, x y x son las componentes del vector y el mdulo de dicho r vector. El parmetro representa el valor de la rotacin sobre el vector .
2.1.4. Relaciones entre matriz de rotacin, ngulos RPY y cuaterniones
Dada una de estas representaciones, existe una relacin entre ella y las dems, de forma que se puede pasar de una representacin a otra aplicando la correspondiente frmula. Llegado a este punto cabe plantearse una situacin importante para el resto del desarrollo del algoritmo. La cuestin es qu representacin es la ms adecuada para calcular de forma continua, es decir, para cul conviene ms seguir su evolucin en funcin de las medidas de los sensores. A priori se podra tomar cualquiera, ya que teniendo una se puede calcular fcilmente la deseada. Clsicamente se ha optado por un algoritmo que va actualizando la matriz de rotacin o los cuaterniones, y es este ltimo el que ms aparece en las ltimas tendencias. Los ngulos RPY y de Euler presentan ms inconvenientes, puesto que en la resolucin de las correspondientes ecuaciones de propagacin en el tiempo aparecen indeterminaciones, debido a que una misma orientacin se puede expresar con distintos ngulos. Los cuaterniones se presentan como la solucin ms adecuada, por ser tan slo cuatro los parmetros a actualizar y por presentar menores errores en la computacin, segn diversos estudios. A continuacin se presentan las otras representaciones en funcin de los cuaterniones: La matriz de rotacin queda:
r11 A RB = r21 r31
r12 r22 r32
r13 (a 2 + b 2 c 2 d 2 ) 2(bc ad ) 2(bd + ac) = 2 2 2 2 r23 2(bc + ad ) (a b + c d ) 2(cd ab) r33 2(bd ac) 2(cd + ab) (a 2 b 2 c 2 + d 2 )
Y los ngulos roll, pitch y yaw se pueden calcular tambin a partir de esta matriz:
32
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
= arctg 2(r32 , r33 )
siendo atan2(x,y) el arco tangente del ngulo x/y, teniendo en cuenta el signo de x e y para determinar el cuadrante (por ejemplo, arctg 2(2,2) = -135).
2 2 = arctg 2( r31 , r11 + r21 )
escogiendo la solucin -90 90, que corresponde a tomar la raz como positiva.
= arctg 2(r21 , r11 )
Existen soluciones degeneradas para = 90 (cos()=0). En estos casos slo puede calcularse la suma o la diferencia de y . Suponiendo = 0, se tienen las soluciones:
= 0, = 90, = arctg 2(r12 , r22 ) = 0, = -90, = - arctg 2(r12 , r22 )
2.1.5. Propagacin de los cuaterniones en el tiempo
Hasta aqu se ha explicado cmo se representa la orientacin del objeto en movimiento con respecto a un marco de referencia fijo. A continuacin se muestra cmo se va transformando esa representacin a lo largo del tiempo, en funcin de las distintas rotaciones en los tres ejes del espacio, ms concretamente de las tres velocidades angulares, que son en definitiva lo que medirn nuestros girscopos. Para el caso de los cuaterniones, que es la representacin que se ha tomado, la ecuacin que define su propagacin es la siguiente. Sean x , y y z las velocidades angulares de la rotacin de los tres ejes del sensor, entonces:
& a a b b & r & q = = 0 .5 c & c & d d
b c a d d a c b
d 0 c x b y a z
33
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
O, lo que es lo mismo,
& 0 a b r & x &= = 0 .5 q y c & & z d
x 0 z
z
0 x
z a 0 y b = 0 .5 x y x c 0 d z
x 0 z
z
0 x
z y r q x 0
2.2. Modelo del sistema
Con la informacin anterior, se puede fcilmente desarrollar un modelo dinmico del sistema en descripcin interna:
r r & x = A x
r donde x es el vector de estado y A la matriz dinmica del sistema.
Una primera aproximacin sera tomar tal cual la ecuacin de propagacin de los cuaterniones, haciendo coincidir al cuaternin con el vector de estado. El resultado sera:
0 r & = 0.5 x x y z
x 0 z
z
0 x
z y r x x 0
Sin embargo, el modelo no se queda aqu. El motivo de la realizacin del modelo es hacer un seguimiento del sistema que nos permita ir integrando las velocidades angulares para que se transformen en los ngulos netos que se ha movido el objeto. Resulta, por tanto, interesante incluir tambin en este modelo la dinmica del giro de los tres ejes. Para modelar el cambio en las velocidades angulares de los tres ejes, se utilizar un sistema de primer orden. Es decir, el movimiento se espera que est dentro de un determinado ancho de banda:
1 / r &= 0 0
0 1/ 0
0 r 0 1/
34
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
siendo
x = y z r
Se puede confeccionar, entonces, el vector de estado para incluir ambas dinmicas en el modelo. El resultado es el siguiente:
x1 x x 2 y x3 z r x = x4 = a x5 b x6 c x d 7
& x 2 / 0 & y & z 0 r & = a = 0 .5 x & & b & c d &
0 2 / 0
0 0 2 / 0 x 0 z 0 y
x y z
z
0 x
x y z z a y b x c 0 d
Ahora el sistema es no lineal, dado que los i son parte del vector de estado, y estn multiplicando a otros estados. El modelo del sistema quedar completo al definir la ecuacin de medida. Esto es la relacin entre las medidas que se pueden obtener de los sensores, y el vector de estado. En el caso de las velocidades angulares i esta relacin es directa, ya que estn directamente incluidas en el vector de estado. Para las medidas de compases magnticos y acelermetros, esta relacin no es otra que la que existe entre la orientacin del objeto y las medidas que nos aportan estos sensores.
35
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
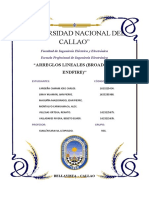
Se ha comentado anteriormente que la orientacin del objeto ser la relacin entre dos sistemas de coordenadas, uno de ellos fijo, que ser el sistema {A}, y el otro solidario al propio objeto, {B}. Se define, en primer lugar, el sistema de coordenadas fijo que servir de referencia, {A}. En ste, el eje X se corresponder con el Norte Geogrfico, el eje Y apuntar hacia el Este, y el eje Z ser hacia abajo, tal como indica la siguiente figura:
N x z y E
Ilustracin 2-2. Sistema de referencia fijo
En este sistema de referencia se definen dos vectores fijos, correspondientes al campo gravitatorio y magntico terrestres. Segn el IGRF (International Geomagnetic Reference Field), las fuerzas gravitatoria y magntica de la Tierra forman los siguientes vectores en nuestra posicin geogrfica, expresados en el marco de referencia que se acaba de exponer:
0 r g = 0 m / s 2 9,82 26,8503 r m = 1,3929 nT 33,7885 Dado que el objetivo es encontrar la orientacin del objeto, slo resulta de utilidad la orientacin de estos vectores, resultando irrelevante el valor de su mdulo. Por tanto, se tomar una versin normalizada de los mismos:
36
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
0 rA g = 0 1 0,62182 rA m = 0,03226 0,78249 Los acelermetros son capaces de medir el vector de aceleracin del campo gravitatorio. Esta medida aporta este vector gravitatorio expresado en el sistema de referencia del objeto, {B}. De la misma forma, con los compases magnticos se obtiene el vector del campo magntico terrestre expresado en {B}. Con esto, el vector de medidas ser:
y1 x y 2 y y3 z B g1B m1B y 4 g1 r r r B B B y = y5 = g 2 , siendo g B = g 2 y m B = m2 B B g 3B m3 y6 g 3 y m B 7 1B y8 m 2 y m B 9 3
r r Los vectores g B y m B sern vectores normalizados, para poder relacionarlos
con los vectores de referencia.
r r Como se ha visto en el apartado 2.1.1, la relacin entre los vectores g y m
expresados en uno y otro sistema de referencia viene dada por:
r Ar g A = RB g B ; r r A g B = ( RB ) T g A
r r r A r A m A = RB m B ; m B = ( RB ) T m A
Y la matriz R se puede expresar en funcin de los cuaterniones, de forma que queda:
37
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
( a 2 + b 2 c 2 d 2 ) 2(bc + ad ) 2(bd ac) rB rA 2 2 2 2 g = 2(bc ad ) (a b + c d ) 2(cd + ab) g 2 2 2 2 2(bd + ac) 2(cd ab) (a b c + d ) ( a 2 + b 2 c 2 d 2 ) 2(bc + ad ) 2(bd ac) rB rA m = 2(bc ad ) (a 2 b 2 + c 2 d 2 ) 2(cd + ab) m 2 2 2 2 2(bd + ac) 2(cd ab) (a b c + d ) Ntese que a, b, c y d son en realidad las componentes del vector de estado, x4, x5, x6 y x7. Con esto se ha obtenido una relacin entre las medidas y los elementos del vector de estado. Nuevamente, esta relacin no es lineal con respecto al vector de estado. El modelo completo del sistema queda de esta forma:
& x1 = (1 / ) x1 & x2 = (1 / ) x2 & x3 = (1 / ) x3 & x4 = ( x1 x5 x2 x6 x3 x7 ) / 2 & x5 = ( x1 x4 + x3 x6 x2 x7 ) / 2 & x6 = ( x2 x4 x3 x5 + x1 x7 ) / 2 & x7 = ( x3 x4 + x2 x5 x1 x6 ) / 2
y1 = x1 y2 = x2 y3 = x3 y4 = 2( x5 x7 x4 x6 ) y5 = 2( x6 x7 + x4 x5 )
2 2 2 2 y6 = x4 x5 x6 + x7 2 2 2 2 y7 = ( x4 + x5 x6 x7 )0,62182 2( x5 x6 + x4 x7 )0,03226 + 2( x5 x7 x4 x6 )0,78249 2 2 2 2 y8 = 2( x5 x6 x4 x7 )0,62182 ( x4 x5 + x6 x7 )0,03226 + 2( x6 x7 + x4 x5 )0,78249 2 2 2 2 y9 = 2( x5 x7 + x4 x6 )0,62182 2( x6 x7 x4 x5 )0,03226 + ( x4 x5 x6 + x7 )0,78249
38
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
2.3. Filtro de Kalman
La orientacin del objeto es la informacin que se quiere obtener del sistema. Esta informacin se encuentra en el vector de estados, concretamente en sus cuatro ltimas componentes, que es el cuaternin que define dicha orientacin. Para conocer el valor de ese vector de estado a lo largo de la evolucin del sistema en el tiempo se utilizar un filtro de Kalman. El filtro de Kalman aporta un procedimiento ptimo para estimar el estado de un sistema, minimizando el valor cuadrtico medio del error cometido en esa estimacin.
2.3.1. Filtro de Kalman discreto
r El filtro de Kalman trata de estimar el estado x n de un proceso en tiempo discreto gobernado por la ecuacin en diferencias lineal estocstica r r r r xk = Axk 1 + Buk 1 + wk 1 r con una medida y m que es r r r y k = Hxk + vk r r Las variables aleatorias wk y vk representan el ruido en el proceso y en la medida, respectivamente. Se suponen independientes, blancos y con una distribucin normal dada por
r p ( w) N (0, Q) r p (v ) N (0, R ) donde las matrices Q y R son las matrices de covarianza del ruido en el proceso y en la medida, respectivamente, y se suponen constantes. Se define tambin la matriz de covarianza del error del estado, Pk. Esta matriz si evolucionar a lo largo de las sucesivas iteraciones. Pk = E ( xk xk )( xk xk )T siendo xk la estimacin del vector de estado. Para estimar el vector de estado, el filtro de Kalman consta de dos pasos. En el primero se intenta predecir el valor del vector de estado y la covarianza de su
39
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
error, a partir de la ecuacin dinmica del sistema. En el segundo se corrige esta prediccin y se actualiza el vector de estado y la covarianza de su error, teniendo en cuenta la ecuacin de medida. Para cada iteracin k, se sigue el siguiente algoritmo:
r xk = Axk 1 + Bu k 1
Pk = APk 1 AT + Q
K k = Pk H T ( HPk H T + R ) 1 r xk = xk + K k ( yk Hxk ) Pk = ( I K k H ) Pk
2.3.2. Filtro de Kalman Extendido (EKF)
En el apartado anterior se supona un sistema lineal. Se ha visto anteriormente que no es ese nuestro caso, por lo que hay que hacer uso del filtro de Kalman Extendido. Esta versin del filtro hace uso del teorema de Taylor y es vlida para un sistema del tipo
r r r r xk = f ( xk 1 , uk 1 , wk 1 ) r r r yk = h( xk , vk )
Se definen las matrices jacobianas: A[i , j ] = W[i , j ] = H [i , j ] = V[i , j ] =
f [i ] r ( xk 1 , uk 1 ,0) x[ j ] f [i ] r ( xk 1 , u k 1 ,0) w[ j ] h[i ] ( xk ,0) x[ j ] h[i ] v[ j ]
( x k ,0 )
Y ahora el algoritmo queda como sigue:
40
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
r xk = f ( xk 1 , uk 1 ,0)
T Pk = Ak Pk 1 Ak + Wk Qk 1WkT T T K k = Pk H k ( H k Pk H k + Vk RkVkT ) 1 r xk = xk + K k ( yk h( xk ,0))
Pk = ( I K k H k ) Pk
2.4. Algoritmo de estimacin
Con la informacin anterior ya se puede proceder a detallar el algoritmo que ser capaz de seguir en tiempo real los cambios en la orientacin del sensor de medida inercial. En primer lugar se ha de discretizar el sistema para trabajar con las ecuaciones en diferencias. Bastar con usar la aproximacin de Euler hacia adelante (Forward Euler), que consiste en aproximar la derivada segn la relacin siguiente:
& x= f ( x) xk +1 xk t T
Se ha introducido aqu un parmetro que muy importante: el tiempo de muestreo T. Este tiempo es el que transcurre entre una iteracin y otra del algoritmo, y debe ser lo suficientemente pequeo como para que la aproximacin sea vlida, pero lo suficientemente grande como para que al procesador le d tiempo a realizar todos los clculos, adems de actualizar todas las medidas de los sensores. Finalmente, el tiempo de muestreo ser de 20 milisegundos. Esto proporciona una tasa de actualizacin de la orientacin de 50 Hz, que es lo mnimo requerido por el DSP de control del helicptero, ya que es esa la frecuencia con la que va actualizando su estado. Una vez pasado a ecuaciones en diferencias y aadido el modelo de ruido, el sistema queda as:
r r r Ecuacin dinmica xk = f ( xk 1 , wk 1 ) :
41
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
x1k = x1k 1 + (T / ) x1k 1 + Tw1k 1 x2k = x2k 1 + (T / ) x2k 1 + Tw2k 1 x3k = x3k 1 + (T / ) x3k 1 + Tw3k 1 x4k = x4k 1 + T ( x1k 1 x5k 1 x2k 1 x6k 1 x3k 1 x7k 1 ) / 2 + Tw4k 1 x5k = x5k 1 + T ( x1k 1 x4k 1 + x3k 1 x6k 1 x2k 1 x7k 1 ) / 2 + Tw5k 1 x6k = x6k 1 + T ( x2k 1 x4k 1 x3k 1 x5k 1 + x1k 1 x7k 1 ) / 2 + Tw6k 1 x7k = x7k 1 + T ( x3k 1 x4k 1 + x2k 1 x5k 1 x1k 1 x6k 1 ) / 2 + Tw7k 1
r r r Ecuacin de medida yk = h( xk , vk ) :
y1k = x1k + v1k y2k = x2k + v2k y3k = x3k + v3k y4k = 2( x5k x7k x4k x6k ) + v4k y5k = 2( x6k x7k + x4k x5k ) + v5k
2 2 2 2 y6k = x4k x5k x6k + x7k + v6k 2 2 2 2 y7k = ( x4k + x5k x6k x7k )0,62182 2( x5k x6k + x4k x7k )0,03226 + 2( x5k x7k x4k x6k )0,78249 + v7k 2 2 2 2 y8k = 2( x5k x6k x4k x7k )0,62182 ( x4k x5k + x6k x7k )0,03226 + 2( x6k x7k + x4k x5k )0,78249 + v8k 2 2 2 2 y9k = 2( x5k x7k + x4k x6k )0,62182 2( x6k x7k x4k x5k )0,03226 + ( x4k x5k x6k + x7k )0,78249 + v9k
r r Las covarianzas de los ruidos wk y vk se definen en base a las desviaciones
tpicas de las seales de los sensores. A priori, estas desviaciones tpicas vendrn dadas por las especificaciones de los fabricantes de los sensores. Girscopo: Segn el datasheet del fabricante, el ruido a 25 C es 0.1 / s / Hz . Para un ancho de banda de 30 Hz el ruido en la medida ser aproximadamente 0.5 / s . Esto es la desviacin tpica del ruido en la velocidad angular. Esto es, ajustado a las unidades usadas en el modelo, /360 rad/s.
Acelermetro: El dato terico sita el espectro de ruido en el acelermetro en 0.225 mg / Hz . Para nuestro ancho de banda de 100 Hz queda una desviacin tpica de 2.25 mg.
42
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
Comps magntico: El fabricante no proporciona un dato exacto al respecto, pero podemos hacer una estimacin. Suponiendo un error de entre 1 y 2 grados en la medida, la desviacin tpica del ruido en las componentes del vector magntico asociado se puede suponer en primera aproximacin del orden de 0.03 (no tiene unidades porque el vector se encuentra normalizado). La relacin entre el error en el ngulo que nos da el comps magntico y el error sobre los ejes del triedro de referencia no es lineal, ya que se basa en senos y cosenos. Esta aproximacin no es ms que una media entre el mejor y el peor caso. A continuacin se detalla cmo queda finalmente el algoritmo de estimacin.
Antes de comenzar el bucle de control, se pueden definir las matrices W y V, ya que son constantes y no har falta tener que definirlas en cada iteracin.
W[i , j ] = V[i , j ] =
f [i ] ( xk 1 ,0) W = T I 7 x 7 w[ j ] h[i ] ( x k ,0 ) V = I 9 x 9 v[ j ]
Se puede definir tambin las matrices de covarianza del ruido en el proceso y en la medida, Q y R. La matriz Q modela el error que se comete en la actualizacin del estado usando la ecuacin dinmica del sistema. En principio se le asignar el siguiente valor: 0 0 0 0 0 0 .1 0 0 0 .1 0 0 0 0 0 0 0 0 .1 0 0 0 0 Q=0 0 0 0.01 0 0 0 0 0 0 0 0.01 0 0 0 0 0 0 0.01 0 0 0 0 0 0 0 0 0.01
La matriz R modela el error en la medida, y se puede definir en funcin de las varianzas de las diferentes componentes del vector de medidas. Llamando v, r y s a las desviaciones tpicas comentadas anteriormente, en el mismo orden, queda la siguiente matriz:
43
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
v 2 0 0 0 R = 0 0 0 0 0
0 v 0 0 0 0 0 0 0
2
0 0 v2 0 0 0 0 0 0
0 0 0 r2 0 0 0 0 0
0 0 0 0 r2 0 0 0 0
0 0 0 0 0 r2 0 0 0
0 0 0 0 0 0 s2 0 0
0 0 0 0 0 0 0 s2 0
0 0 0 0 0 0 0 0 s2
Finalmente, se procede a comenzar el bucle. Para cada iteracin k se hace lo siguiente: -
r Actualizacin de las medidas: se actualiza el vector yk con las medidas de girscopos, acelermetros y compases magnticos.
Clculo de la matriz Ak.
A[i , j ] =
f [i ] ( xk 1 ,0) x[ j ]
T 1+ 0 0 Ak = T x 2 5k 1 T x4k 1 2 Tx 2 7k 1 T x6k 1 2
0 1+ T
0 0 1+ T
0 0 0 1 T x1 2 k 1 T x2 2 k 1 T x3 2 k 1
0 0 0 T x1 2 k 1 1 T x3 2 k 1 T x2 2 k 1
0 0 0 T x2 2 k 1 T x3 2 k 1 1 T x1 2 k 1
0 T x6 2 k 1 T x7k 1 2 T x4 2 k 1 T x5 2 k 1
T x7 2 k 1 T x6 2 k 1 T x5k 1 2 T x4 2 k 1
0 0 T x3k 1 2 T x2k 1 2 T x1k 1 2 1 0
44
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
Clculo del vector de estado a priori, xk , usando el modelo dinmico del sistema.
xk = f ( xk 1 ,0)
Clculo de la matriz Hk.
H [i , j ] = 1 0 0 0 0 0 Hk = 0 0 0 0 0 1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2x 2x
6k 5k 4k
h[i ] ( xk ,0) x[ j ] 0 0 0 2x 2x
7k 4k 5k
0 0 0
2 x4k 2 x7k
2x A 2 x4k m1 + 2 x7k m2A
2 x6k m3A 2 x7k m1A + 2 x4k m2A + 2 x5k m3A 2 x6k m1A 2 x5k m2A + 2 x4k m3A
2x 2 x5k m1A + 2 x6k m2A
+ 2 x7k m3A 2 x6k m1A 2 x5k m2A 2 x4k m3A 2 x7k m1A 2 x4k m2A 2 x5k m3A
2 x6k 2 x6k m1A + 2 x5k m2A 2 x4k m3A 2 x5k m1A + 2 x6k m2A + 2 x7k m3A 2 x4k m1A + 2 x7k m2A 2 x6k m3A
0 0 2 x5k 2 x6k 2 x7k A A 2 x7k m1 + 2 x4k m2 + 2 x5k m3A A A 2 x4k m1 2 x7k m2 + 2 x6k m3A 2 x5k m1A + 2 x6k m2A + 2 x7k m3A 0
Clculo de la covarianza del vector de estado a priori, Pk-.
T Pk = Ak Pk 1 Ak + WQW T
Clculo de la ganancia de Kalman, Kk.
45
Unidad de Medida Inercial. Algoritmo de Estimacin e Implementacin Software Desarrollo terico
T T K k = Pk H k ( H k Pk H k + VRV T ) 1
r Actualizacin de x y de su matriz de covarianza.
r xk = xk + K k ( yk h( xk ,0))
Pk = ( I K k H k ) Pk
46
También podría gustarte
- Analizador de AntenaDocumento4 páginasAnalizador de AntenaIvan Mauricio MartinezAún no hay calificaciones
- Toolbox de Robótica: Simulación y AplicacionesDocumento8 páginasToolbox de Robótica: Simulación y AplicacionesSergio SorucoAún no hay calificaciones
- Deber Diseño de Capa Física de Redes Inalámbricas - Figueroa - Saico - BajanaDocumento11 páginasDeber Diseño de Capa Física de Redes Inalámbricas - Figueroa - Saico - Bajanadiego ivan saico tomaláAún no hay calificaciones
- Guia 9Documento6 páginasGuia 9Hugo CarhuallanquiAún no hay calificaciones
- Rectificador Monofasico de Onda Completa Con Carga R LDocumento14 páginasRectificador Monofasico de Onda Completa Con Carga R LKevin ChAún no hay calificaciones
- SQLDocumento2 páginasSQLWilliam QuintuñaAún no hay calificaciones
- Informe 1 Introduccion A Las TeleomunicacionesDocumento21 páginasInforme 1 Introduccion A Las TeleomunicacionesAnonymous iGvZPKrAún no hay calificaciones
- Análisis Matemático II Campos EscalaresDocumento37 páginasAnálisis Matemático II Campos EscalarespabloAún no hay calificaciones
- Solucionario 3ra Práctica Calificada EE210 Ciclo 2018 IIDocumento6 páginasSolucionario 3ra Práctica Calificada EE210 Ciclo 2018 IIDiego Salazar UrbinaAún no hay calificaciones
- Laboratorio N°03Documento9 páginasLaboratorio N°03williamAún no hay calificaciones
- Previo 1 Sist. DigitalesDocumento13 páginasPrevio 1 Sist. DigitalesValeria Andrea Nina ArrescurenagaAún no hay calificaciones
- 15 Feb 208016 Modulo Contenido Didactico 2011Documento440 páginas15 Feb 208016 Modulo Contenido Didactico 2011Diego Leonardo DuarteAún no hay calificaciones
- Transistores bipolares: características y polarizacionesDocumento17 páginasTransistores bipolares: características y polarizacionesErwin Alfonso Balcazar MoraledaAún no hay calificaciones
- GUÍA de PROBLEMAS de CORRIENTE ALTERNADA y MAQUINAS de CA de la FACULTAD de CIENCIAS EXACTAS de la UNCDocumento16 páginasGUÍA de PROBLEMAS de CORRIENTE ALTERNADA y MAQUINAS de CA de la FACULTAD de CIENCIAS EXACTAS de la UNCAlex NeiraAún no hay calificaciones
- Solucionario de circuitos magnéticos y transformadorDocumento6 páginasSolucionario de circuitos magnéticos y transformadorJosé LaraAún no hay calificaciones
- Practica 1 Diseño DigitalDocumento8 páginasPractica 1 Diseño DigitalPandaAún no hay calificaciones
- Ej 3-Labo1 PDSDocumento8 páginasEj 3-Labo1 PDSTadokaDragneelAún no hay calificaciones
- Problemas Tema 4Documento18 páginasProblemas Tema 4Yani Ivanov ManovAún no hay calificaciones
- Serie11mayoabel PDFDocumento1 páginaSerie11mayoabel PDFDemian Valdovinos100% (1)
- Circuito TanqueDocumento3 páginasCircuito TanqueAlexis Salvador Zambrano0% (1)
- Minisumo 10x10Documento1 páginaMinisumo 10x10Leo AguileraAún no hay calificaciones
- Barrido ParametricoDocumento4 páginasBarrido ParametricoIgnacioMartíAún no hay calificaciones
- Siste Digit Previo 3Documento6 páginasSiste Digit Previo 3DiegoAún no hay calificaciones
- Articulo IEEE Curvas Del DiodoDocumento4 páginasArticulo IEEE Curvas Del DiodoEveth De la CruzAún no hay calificaciones
- Proyecto Ball and BeamDocumento19 páginasProyecto Ball and BeamAntonio MoyaAún no hay calificaciones
- Práctica 4 TermocuplaDocumento6 páginasPráctica 4 TermocuplaFreddy TamayoAún no hay calificaciones
- Reducción de Tablas EstatalesDocumento8 páginasReducción de Tablas EstatalesGuillermo Leon Uribe JimenezAún no hay calificaciones
- Consulta, Factor de Rizado y FiltrosDocumento3 páginasConsulta, Factor de Rizado y FiltrosPaty SalazarAún no hay calificaciones
- Electrónica I Tarea de Filtro CapacitivoDocumento8 páginasElectrónica I Tarea de Filtro CapacitivoIsmael JaramilloAún no hay calificaciones
- Lab de FMDocumento29 páginasLab de FMIsaac SaturnoAún no hay calificaciones
- Sistema Mecánico TraslacionalDocumento2 páginasSistema Mecánico TraslacionalMario Roberto100% (1)
- S04 Convertidor DC DC Reductor Buck EJERCICIOSDocumento12 páginasS04 Convertidor DC DC Reductor Buck EJERCICIOSRonald Santiago AcuñaAún no hay calificaciones
- 2 13Documento3 páginas2 13Fredy Alexis Salas Velasquez0% (1)
- Examen Parcial Control Digital 2021ADocumento2 páginasExamen Parcial Control Digital 2021AxavierAún no hay calificaciones
- 17 Dispositivos de Disparo Ujt y PutDocumento9 páginas17 Dispositivos de Disparo Ujt y PutRicardo LopezAún no hay calificaciones
- Teoría de Marco de ReferenciaDocumento19 páginasTeoría de Marco de ReferenciaAlfredo Gil Velasco100% (1)
- Circuitos neumáticos: válvulas y temporizadoresDocumento3 páginasCircuitos neumáticos: válvulas y temporizadoresKancoGonzalesCAún no hay calificaciones
- LAB2 Amp Simetria ComplementariaDocumento4 páginasLAB2 Amp Simetria ComplementariaJEAN LEONARDO ESTRADA ROQUEAún no hay calificaciones
- Circuitos EquipoDocumento67 páginasCircuitos EquipoKaren AlejandraAún no hay calificaciones
- Tarea No.1 (Duarte, Muñoz, Beitia)Documento12 páginasTarea No.1 (Duarte, Muñoz, Beitia)jorge100% (1)
- Interpretación de Polos y Ceros de Una Función de TransferenciaDocumento16 páginasInterpretación de Polos y Ceros de Una Función de TransferenciaEduardo PastorAún no hay calificaciones
- Laboratorio #1Documento12 páginasLaboratorio #1Miguel AlonsoAún no hay calificaciones
- Experiencia 1: TEORIA DE CONTROL AUTOMATICO 02Documento2 páginasExperiencia 1: TEORIA DE CONTROL AUTOMATICO 02JHOEL RENE MAMANI HUANCAAún no hay calificaciones
- Practica - 1 Sis Digis 2Documento7 páginasPractica - 1 Sis Digis 2Mathy MerinoAún no hay calificaciones
- 1.3 Circuitos RectificadoresDocumento3 páginas1.3 Circuitos RectificadoresJonaThan GuamanAún no hay calificaciones
- 2018 10 Ejercicios 11775Documento1 página2018 10 Ejercicios 11775Alex LamiñoAún no hay calificaciones
- Demuestre Que La Convolución de Dos Señales Triangulares Da Como Resultado Una Señal Parabólica.Documento6 páginasDemuestre Que La Convolución de Dos Señales Triangulares Da Como Resultado Una Señal Parabólica.carAún no hay calificaciones
- Lab Nº3 - SIMULACION NUMERICADocumento5 páginasLab Nº3 - SIMULACION NUMERICAfrankAún no hay calificaciones
- Circuito de Luces DireccionalesDocumento3 páginasCircuito de Luces DireccionalesAdelaagaAún no hay calificaciones
- Acoplamiento MagneticoDocumento62 páginasAcoplamiento MagneticoJose Gerardo Cuadras Felix100% (1)
- Clase Martes 29 de MarzoDocumento16 páginasClase Martes 29 de MarzoAgustín BejanuelAún no hay calificaciones
- Lab Previo 1Documento9 páginasLab Previo 1RENZO JETT VARGAS DELGADOAún no hay calificaciones
- Informe 1Documento17 páginasInforme 1Jhon Cerna F.Aún no hay calificaciones
- Procedimiento y Cuestionario 1,2,3 y 4Documento12 páginasProcedimiento y Cuestionario 1,2,3 y 4Sandra Mirella Toribio RodriguezAún no hay calificaciones
- Coleccion Problem As CA 3Documento134 páginasColeccion Problem As CA 3Ronny RamírezAún no hay calificaciones
- Transistor BJT en ConmutacionDocumento5 páginasTransistor BJT en ConmutacionFreddy QuAún no hay calificaciones
- 02 Capitulo2 PDFDocumento18 páginas02 Capitulo2 PDFAlejandro GonzalezAún no hay calificaciones
- Herramientas MatematicasDocumento8 páginasHerramientas MatematicasRichard MuñozAún no hay calificaciones
- Brazo Robotico de 5 GLDDocumento15 páginasBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOAún no hay calificaciones
- Parametrizaciones de Movimientos Rígidos en 3DDocumento6 páginasParametrizaciones de Movimientos Rígidos en 3DAnaliz S. Acosta AlvinoAún no hay calificaciones
- Nepomiachi - Foucault y Las Tecnologias Del YoDocumento6 páginasNepomiachi - Foucault y Las Tecnologias Del YomdurcetAún no hay calificaciones
- 8448169263Documento30 páginas8448169263Cristian Arturo ArellanoAún no hay calificaciones
- MEDIA GEOMÉTRICA Y MEDIA ÁRMONICA (1) (1) .OdtDocumento2 páginasMEDIA GEOMÉTRICA Y MEDIA ÁRMONICA (1) (1) .Odtaguilas,blancasAún no hay calificaciones
- Ajedrez NepoDocumento1 páginaAjedrez Nepoaguilas,blancasAún no hay calificaciones
- Mate en Una JugadaDocumento10 páginasMate en Una Jugadaaguilas,blancasAún no hay calificaciones
- Vectores en Diferentes Sistemas de CoordenadasDocumento31 páginasVectores en Diferentes Sistemas de Coordenadasaguilas,blancas100% (1)
- Taller Dominio LimitesDocumento2 páginasTaller Dominio Limitesaguilas,blancasAún no hay calificaciones
- Volante de ClasesDocumento1 páginaVolante de Clasesaguilas,blancasAún no hay calificaciones
- Elaboración de Una Tabla de FrecuenciasDocumento2 páginasElaboración de Una Tabla de Frecuenciasaguilas,blancasAún no hay calificaciones
- Act # 3 Medidas de Tendencia CentralDocumento4 páginasAct # 3 Medidas de Tendencia Centralaguilas,blancasAún no hay calificaciones
- Cuidado Con La DiagonalDocumento6 páginasCuidado Con La Diagonalaguilas,blancasAún no hay calificaciones
- Gai-02-R03 Plan Area MatematicasDocumento74 páginasGai-02-R03 Plan Area Matematicasaguilas,blancasAún no hay calificaciones
- Brillo Posicional de SoDocumento2 páginasBrillo Posicional de Soaguilas,blancasAún no hay calificaciones
- Elaboración de Una Tabla de FrecuenciasDocumento2 páginasElaboración de Una Tabla de Frecuenciasaguilas,blancasAún no hay calificaciones
- Un Buen Día de AroniánDocumento3 páginasUn Buen Día de Aroniánaguilas,blancasAún no hay calificaciones
- Diarios de SepherDocumento4 páginasDiarios de Sepheraguilas,blancasAún no hay calificaciones
- Anécdotas de SantosDocumento10 páginasAnécdotas de Santosaguilas,blancasAún no hay calificaciones
- Proyecto EducativoDocumento4 páginasProyecto Educativoaguilas,blancasAún no hay calificaciones
- Taller # 4 Segundo CorteDocumento1 páginaTaller # 4 Segundo Corteaguilas,blancasAún no hay calificaciones
- En La Cultura JaponesaDocumento10 páginasEn La Cultura Japonesaaguilas,blancasAún no hay calificaciones
- Partida 1 Magnus Vs KjarkinDocumento9 páginasPartida 1 Magnus Vs Kjarkinaguilas,blancasAún no hay calificaciones
- Daniel y El Foso de LeonesDocumento2 páginasDaniel y El Foso de Leonesaguilas,blancasAún no hay calificaciones
- Los Cinco Arrepentimientos Más Comunes Antes de MorirDocumento2 páginasLos Cinco Arrepentimientos Más Comunes Antes de Moriraguilas,blancas80% (10)
- G11 MATEMATICAS P04f18Documento2 páginasG11 MATEMATICAS P04f18aguilas,blancasAún no hay calificaciones
- Procesamiento de La InformaciónDocumento16 páginasProcesamiento de La Informaciónaguilas,blancasAún no hay calificaciones
- Libro TransformadoresDocumento103 páginasLibro Transformadoresaguilas,blancasAún no hay calificaciones
- Residuos LiquidosDocumento1 páginaResiduos Liquidosaguilas,blancasAún no hay calificaciones
- Elaboración de Una Tabla de FrecuenciasDocumento2 páginasElaboración de Una Tabla de Frecuenciasaguilas,blancasAún no hay calificaciones
- Carlsen Vence A NakamuraDocumento1 páginaCarlsen Vence A Nakamuraaguilas,blancasAún no hay calificaciones
- Tallergraficosestadsticos Grado 7Documento5 páginasTallergraficosestadsticos Grado 7aguilas,blancasAún no hay calificaciones
- Guía Práctica 3 (Resuelta), M. Fluidos IDocumento6 páginasGuía Práctica 3 (Resuelta), M. Fluidos Ilolo100% (1)
- PC2 - Diseño y Analisis EstructuralDocumento80 páginasPC2 - Diseño y Analisis EstructuralCesar Eduardo Cisneros LozaAún no hay calificaciones
- Ficha Tecnica Sokkia FXDocumento4 páginasFicha Tecnica Sokkia FXJorge OsorioAún no hay calificaciones
- Taller VibracionesDocumento1 páginaTaller VibracionesCarlos Felipe Arancibia AcevedoAún no hay calificaciones
- 03 Modos de ControlDocumento34 páginas03 Modos de ControlRay ContrerasAún no hay calificaciones
- Cuaderno Ejercicios Practicas Excel AvanzadoDocumento1 páginaCuaderno Ejercicios Practicas Excel AvanzadoEvelyn Villegas YucraAún no hay calificaciones
- Partes de Torno y NCNDocumento9 páginasPartes de Torno y NCNEnrique Gonzalez HerreraAún no hay calificaciones
- Ok Fundicion y Colada 2014Documento43 páginasOk Fundicion y Colada 2014juancarlosjuaquinAún no hay calificaciones
- Hoja Membretada Ing. Ivan CcayasccaDocumento2 páginasHoja Membretada Ing. Ivan CcayasccaYordan BohorquezAún no hay calificaciones
- Circular Dpayt-002-2024 Sieel - Sistema Expediente Electrónico - Atención Virtual - Solicitar DocumentacionDocumento4 páginasCircular Dpayt-002-2024 Sieel - Sistema Expediente Electrónico - Atención Virtual - Solicitar DocumentacionEstudio Alvarezg AsociadosAún no hay calificaciones
- Introduccion e Instrumentos de MedidasDocumento245 páginasIntroduccion e Instrumentos de MedidasI-ván F Zandalio100% (1)
- Análisis de transferencia de calor por convección y radiación en láminas metálicasDocumento20 páginasAnálisis de transferencia de calor por convección y radiación en láminas metálicasJoseAlejandroSeguraGalvisAún no hay calificaciones
- Plano de Instalaciones ElectricasDocumento1 páginaPlano de Instalaciones ElectricasAdan LopezAún no hay calificaciones
- Equipo 1 Grupo 108 ADocumento14 páginasEquipo 1 Grupo 108 AQuimicaUnoAún no hay calificaciones
- 7MWTW7300EW Manual de Uso y Cuidado PDFDocumento23 páginas7MWTW7300EW Manual de Uso y Cuidado PDFjuan marquezAún no hay calificaciones
- Construccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFDocumento88 páginasConstruccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFTeresa Rivera VilchezAún no hay calificaciones
- Informe de AdministraciónDocumento4 páginasInforme de AdministraciónLasColinas TurbacoAún no hay calificaciones
- Taller de Reapso de Física de 3 Periodo 7°Documento5 páginasTaller de Reapso de Física de 3 Periodo 7°LUCIA OLIVEROSAún no hay calificaciones
- Estructuras de Concreto Reforzado DISENODocumento9 páginasEstructuras de Concreto Reforzado DISENOSomarRikardtAún no hay calificaciones
- Numero Reynolds, Ecuación de PousevilleDocumento7 páginasNumero Reynolds, Ecuación de PousevilleChristopher Cabrera60% (5)
- Micro y ManotecnologiaDocumento2 páginasMicro y ManotecnologiaJairo JairAún no hay calificaciones
- Influencia de Los Suelos Finos en La Densidad Seca Máxima y Humedad Óptima de Bases Granulares de La Ciudad de JuliacaDocumento19 páginasInfluencia de Los Suelos Finos en La Densidad Seca Máxima y Humedad Óptima de Bases Granulares de La Ciudad de JuliacaGazul Mamani GiltAún no hay calificaciones
- Ensayo 3 Control y Regulacion de InyectoresDocumento10 páginasEnsayo 3 Control y Regulacion de InyectoresRaul PerezAún no hay calificaciones
- Semana 3 - TPMDocumento43 páginasSemana 3 - TPMeduardo quispeAún no hay calificaciones
- Electróstatica Actividades ExperimentalesDocumento48 páginasElectróstatica Actividades ExperimentalescdreamilyAún no hay calificaciones
- Cotizador Instalacion A.A. DX - 2016 Ver. 2.0Documento52 páginasCotizador Instalacion A.A. DX - 2016 Ver. 2.0FREDYAún no hay calificaciones
- Elementos de Maquinas y Fundamentos de Diseno IIDocumento3 páginasElementos de Maquinas y Fundamentos de Diseno IIrobertAún no hay calificaciones
- Formato de Pruebas de DisparosDocumento4 páginasFormato de Pruebas de DisparosJordi MujicaAún no hay calificaciones
- Proyecto Final MicroondasDocumento21 páginasProyecto Final Microondasjavier medinaAún no hay calificaciones
- Problemas de Enzimologia. 2017Documento3 páginasProblemas de Enzimologia. 2017Omar José Cotazo MosqueraAún no hay calificaciones