También podría gustarte
- Senati PLC BasicoDocumento157 páginasSenati PLC BasicoFranco Carrillo100% (1)
- Manual para Acordeon de BotonesDocumento2 páginasManual para Acordeon de BotonesStella Cortes100% (1)
- Criterio de Estabilidad de Nyquist y Diagramas de BodeDocumento7 páginasCriterio de Estabilidad de Nyquist y Diagramas de BodeRuben AvalosAún no hay calificaciones
- Diagramas de NicholsDocumento8 páginasDiagramas de NicholsLaura Berrout Ramos100% (1)
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Funciones TrascendentalesDocumento45 páginasFunciones TrascendentalesReyna AlvaresAún no hay calificaciones
- Estabilidad RelativaDocumento28 páginasEstabilidad RelativaMarco Alejandro50% (2)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Protocolo de Uso y Manejo Historia ClinicaDocumento7 páginasProtocolo de Uso y Manejo Historia ClinicaJuan DiazAún no hay calificaciones
- Escenario 4 Sistemas DigitalesDocumento20 páginasEscenario 4 Sistemas DigitalesSantiago Muñoz100% (2)
- NYQUISTDocumento40 páginasNYQUISTJuan Carlos Landa HuamactoAún no hay calificaciones
- Control II - Criterio de Estabilidad de NyquistDocumento20 páginasControl II - Criterio de Estabilidad de NyquistJovany Salazar100% (1)
- Criterio de Estabilidad de Nyquist EXPONERDocumento22 páginasCriterio de Estabilidad de Nyquist EXPONERLuciano Ezequiel Quinto ContrerasAún no hay calificaciones
- Teorema de BodeDocumento13 páginasTeorema de BodeRomel Patiño100% (1)
- Diagrama de Nyquist y Ziegler NicholsDocumento5 páginasDiagrama de Nyquist y Ziegler NicholsJuan D HackAún no hay calificaciones
- PrevioDocumento8 páginasPrevioarnoldAún no hay calificaciones
- Análisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoDocumento4 páginasAnálisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoLuilli Angel EsquincaAún no hay calificaciones
- Aplicacion Del Criterio de Routh HurwitzDocumento18 páginasAplicacion Del Criterio de Routh HurwitzNo El OrtizAún no hay calificaciones
- Grupo 2 - Semana 10Documento51 páginasGrupo 2 - Semana 10Godo SánchezAún no hay calificaciones
- Cortes Villalvazo Gloria INSB Sistemas de Control CriterioDocumento8 páginasCortes Villalvazo Gloria INSB Sistemas de Control CriterioFATIMA MARGARITA LOPEZ MAGANAAún no hay calificaciones
- Respuesta de Un Sistema A Entrada SinusoidalDocumento9 páginasRespuesta de Un Sistema A Entrada SinusoidalsamgstormAún no hay calificaciones
- 1.6b Estabilidad - NyquistDocumento9 páginas1.6b Estabilidad - Nyquistlaura andrea BermudezAún no hay calificaciones
- Clase07 Control DigitalDocumento14 páginasClase07 Control DigitalCM35Aún no hay calificaciones
- Criterio de Estabilidad de NyquistDocumento17 páginasCriterio de Estabilidad de NyquistNilton Zavaleta AnchivilcaAún no hay calificaciones
- Cuestionario Frecuencia RespuestaDocumento7 páginasCuestionario Frecuencia RespuestaOmar GeedorahAún no hay calificaciones
- Tarea 3Documento15 páginasTarea 3Luis TapiaAún no hay calificaciones
- Criterio de Estabilidad de NyquistDocumento4 páginasCriterio de Estabilidad de NyquistReyna Sofia Vilca ApazaAún no hay calificaciones
- Capitulo 4Documento28 páginasCapitulo 4Tomas Alberto Castellanos WonkaAún no hay calificaciones
- Tarea 13Documento21 páginasTarea 13Luis TapiaAún no hay calificaciones
- Criterio de Nyquist PDFDocumento70 páginasCriterio de Nyquist PDFYernne VegaAún no hay calificaciones
- Criterio de Estabilidad de NyquistDocumento6 páginasCriterio de Estabilidad de NyquistLuis CoronadoAún no hay calificaciones
- Examen Parcial CeDocumento30 páginasExamen Parcial CeTRUJILLO ZULUETA RENATO ANGELOAún no hay calificaciones
- Examen Parcial CeDocumento30 páginasExamen Parcial CeTRUJILLO ZULUETA RENATO ANGELOAún no hay calificaciones
- Clase 7 Correspondencia Del Plazo S A Plano ZDocumento26 páginasClase 7 Correspondencia Del Plazo S A Plano ZjajueralAún no hay calificaciones
- Tecnicas de Frecuencia de La RespuestaDocumento21 páginasTecnicas de Frecuencia de La RespuestaJohanna Mishelle Rivera MontañoAún no hay calificaciones
- Teoria de Control - Analisis de Respuesta de FrecuenciaDocumento34 páginasTeoria de Control - Analisis de Respuesta de FrecuenciaespinozayaAún no hay calificaciones
- Laboratorio 1 FinalDocumento7 páginasLaboratorio 1 Finalceleste claroAún no hay calificaciones
- Análisis de EstabilidadDocumento19 páginasAnálisis de Estabilidadavengers vengadorAún no hay calificaciones
- Diagramas de BodeDocumento6 páginasDiagramas de BodeMaria Belen Cunalata HilañoAún no hay calificaciones
- Laboratorio N°1 - Trabajo GrupalDocumento22 páginasLaboratorio N°1 - Trabajo GrupalOSCAR VINICIO CHUQUITARCO LAGLAAún no hay calificaciones
- Introduccin A La Respuesta en FrecuenciaDocumento12 páginasIntroduccin A La Respuesta en FrecuenciaAda HofstetterAún no hay calificaciones
- Modelos de Polos y CerosDocumento9 páginasModelos de Polos y CerosJose LlempenAún no hay calificaciones
- BodeDocumento22 páginasBodeCesar CanulAún no hay calificaciones
- 5c RtaTemp DiscretaDocumento72 páginas5c RtaTemp DiscretaYeison reinaAún no hay calificaciones
- Diagramas de La Funcion de RedDocumento15 páginasDiagramas de La Funcion de RedJhimmy GOnzalezAún no hay calificaciones
- Actividad 6 ControlDocumento12 páginasActividad 6 Controlhelen diazAún no hay calificaciones
- Diagramas CircularesDocumento18 páginasDiagramas CircularesMaría Sandra UdrízarAún no hay calificaciones
- Investigacion Control II OPADocumento8 páginasInvestigacion Control II OPAOsbaldo PulidoAún no hay calificaciones
- Teorema de NisquisDocumento73 páginasTeorema de NisquisPaulo CamposAún no hay calificaciones
- Lectura 16Documento9 páginasLectura 16Bryan AnthonyAún no hay calificaciones
- 13 Analisis en FrecuenciaDocumento23 páginas13 Analisis en FrecuenciaElvis Casas BaltazarAún no hay calificaciones
- Instituto Tecnologico Superior de ComalcalcoDocumento10 páginasInstituto Tecnologico Superior de Comalcalcocynthia del carmen izquierdo bernardoAún no hay calificaciones
- Diagramas PolaresDocumento30 páginasDiagramas PolaresAlexander Chalán CastilloAún no hay calificaciones
- Instituto Tecnológico DE: Unidad I: Respuesta A La FrecuenciaDocumento18 páginasInstituto Tecnológico DE: Unidad I: Respuesta A La FrecuenciaIbeth Mtz100% (1)
- Respuesta en Frecuencia Ensayo No.2Documento3 páginasRespuesta en Frecuencia Ensayo No.2Jeremias Cuello EvangelistaAún no hay calificaciones
- Diagrama de Bode MatlabDocumento28 páginasDiagrama de Bode MatlabFABIANCHO2210Aún no hay calificaciones
- Unidad III Control DigitalDocumento6 páginasUnidad III Control DigitalChava ZamudioAún no hay calificaciones
- Tema 10 de Unidad 1Documento21 páginasTema 10 de Unidad 1Scarllet Osuna TostadoAún no hay calificaciones
- Unidad 5 - Análisis y Diseño de Sistemas de Control Por El Método de La Respuesta A La FrecuenciaDocumento44 páginasUnidad 5 - Análisis y Diseño de Sistemas de Control Por El Método de La Respuesta A La Frecuenciaangel9021Aún no hay calificaciones
- Presentacion Criterio NyquistDocumento37 páginasPresentacion Criterio NyquistNicolas VieraAún no hay calificaciones
- Organizadores GráficosDocumento5 páginasOrganizadores GráficosAdryana MejiaAún no hay calificaciones
- Tema2 SPDocumento38 páginasTema2 SPPatt SantistevanAún no hay calificaciones
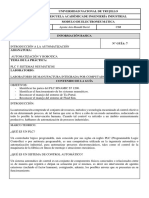
- Laboratorio 7 AutomatizacionDocumento6 páginasLaboratorio 7 AutomatizacionRichard Javier Portales CornelioAún no hay calificaciones
- Automatizacion de Maquinas TermicasDocumento27 páginasAutomatizacion de Maquinas TermicasJhon Alex Morales VallesAún no hay calificaciones
- Aplicación de La Ecuación de Balance de Materias para Yacimientos de GasDocumento5 páginasAplicación de La Ecuación de Balance de Materias para Yacimientos de GasLuna Kaarrillo KordovaaAún no hay calificaciones
- Preguntas de OfimaticaDocumento6 páginasPreguntas de OfimaticaMauricioCompáAún no hay calificaciones
- Servidores de Dominio InvestigacionDocumento5 páginasServidores de Dominio Investigacionkevin100% (1)
- MPQ-SWG Ug EsDocumento116 páginasMPQ-SWG Ug EsproyectosoropezaingenierosAún no hay calificaciones
- Proforma PR001680 Sistema de Voz y DatosDocumento1 páginaProforma PR001680 Sistema de Voz y DatosDanny ArtosAún no hay calificaciones
- Agesic, 2012Documento46 páginasAgesic, 2012Celeste BoxAún no hay calificaciones
- ACTIVIDAD 7 - M.FINANCIERA (1) UltimaDocumento23 páginasACTIVIDAD 7 - M.FINANCIERA (1) UltimaAna Maria RodriguezAún no hay calificaciones
- RojoDocumento63 páginasRojoZarkAún no hay calificaciones
- EPSON l3150 IndicadoresDocumento2 páginasEPSON l3150 IndicadoresLoober MoreiraAún no hay calificaciones
- Manual de AlbañileríaDocumento3 páginasManual de Albañileríacarlos shaspinAún no hay calificaciones
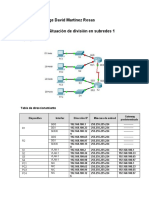
- Taller1 Subredes1Documento10 páginasTaller1 Subredes1David MartinezAún no hay calificaciones
- Auxiliar LaboratorioDocumento4 páginasAuxiliar LaboratoriosandraAún no hay calificaciones
- 1ºgs Ari Prog Senh 21 22Documento38 páginas1ºgs Ari Prog Senh 21 22Alejandra Ana Morera BarriosAún no hay calificaciones
- Lista de Precios ABBDocumento294 páginasLista de Precios ABBEdgar Alexis Cribillero0% (2)
- UntitledDocumento21 páginasUntitledDhjeeken EbbeheAún no hay calificaciones
- TareaInformáticaAplicada SOLORZANO MATIASDocumento14 páginasTareaInformáticaAplicada SOLORZANO MATIASlizbeth obregon julcaAún no hay calificaciones
- Actividad 2 AlgoritmosDocumento8 páginasActividad 2 AlgoritmosLuis Fernando Velasquez VallejoAún no hay calificaciones
- Alfredo Granados GarciaDocumento390 páginasAlfredo Granados GarciaAnonymous 5etkY1TjhDAún no hay calificaciones
- Tutorial Marvin SketchDocumento24 páginasTutorial Marvin SketchLeonardo VacaAún no hay calificaciones
- Manual Usuario Speed Dome DahuaDocumento28 páginasManual Usuario Speed Dome DahuaRicardo GutierrezAún no hay calificaciones
- ACM Tema 04A EcuacionesDocumento10 páginasACM Tema 04A EcuacionesPedro Lomas NielfaAún no hay calificaciones