INSTITUTO TECNLGICO DE
MATAMOROS
UNIDAD III
CRITERIO DE ESTABILIDAD DE
NYQUIST
Ing. Jorge Alejandro Gallegos de la Cruz
Diciembre 2011
INTRODUCCIN:
El criterio de estabilidad de Nyquist relaciona la respuesta
en frecuencia de lazo abierto con la estabilidad en lazo
cerrado; basado en un teorema de la variable compleja
que se fundamenta en el mapeo de los contornos en el
plano complejo.
Para una trayectoria cerrada y continua en el plano s,
que no pasa por ninguna singularidad, le corresponde
una trayectoria cerrada en el plano F(s).
Si el contorno en el plano s (Is), encierra igual numero
de ceros que polos de F(s), el contorno en F(s), (I
F(s)
),
no encerrara el origen.
Si el Is encierra n polos de F(s), I
F(s)
rodea al origen n-
veces en sentido contario a las manecillas del reloj.
Si el Is encierra m ceros de F(s), I
F(s)
rodea al origen
m-veces en sentido horario.
Fundamentos: Transformacin de contornos en el plano s
Suponga que se quiere transformar una serie de valores de s en el plano s, donde todos ellos
forman una trayectoria cerrada o contorno , utilizando la funcin
3 -1
1 2
1
-1
Plano s
Plano F(s)
1 2 ) ( + = s s F
e j
o
jv
u
Cada punto o elemento del contorno en el plano s, tiene su representacin en el plano F(s). Se
evalan todos los puntos del contorno y se obtiene un contorno en el plano F(s). En este caso, el
contorno en el plano F(s) conserva la misma forma que el contorno del plano s,
(Transformacin conforme).
1 2 ) ( + = s s F
Ambos contornos se consideran que tienen un sentido positivo.
Ahora, se transforma el mismo contorno en plano s, utilizando otra funcin de transformacin:
1
-1
Plano s
Plano F(s)
e j
o
jv
u
3
) (
+
=
s
s
s F
a
b
d
c
a
b
d
c
En este caso la transformacin es no conforme pero conserva el sentido positivo.
Existe una caracterstica muy interesante que ocurre cuando el contorno del plano s encierra a
ceros o polos la funcin:
1.- Si el contorno en el plano s encierra a un cero de la funcin, el contorno en el plano F(s)
encierra al origen en el mismo sentido del contorno en plano s
2.- Si el contorno en el plano s no encierra a ningn cero o polo de la funcin, el contorno en el
plano F(s) no encierra al origen.
1
-1
Plano s
Plano F(s)
e j
o
jv
u
3
) (
+
=
s
s
s F
a
b
d
c
a
b
d
c
3.- Si el contorno en el plano s encierra a algn polo de la funcin, el contorno en el plano
F(s) encierra al origen en sentido contrario.
-3
Plano s
Plano F(s)
e j
o
jv
u
3
) (
+
=
s
s
s F
a
b
d
c
a
b
d
c
4.- Si el contorno en el plano s encierra a un cero y un polo de la funcin, el contorno en el
plano F(s) no encierra al origen.
-3
Plano s
Plano F(s)
e j
o
jv
u
3
) (
+
=
s
s
s F
a
b
d
c
a
b
d
c
Todos estos resultado son consecuencia del principio del argumento (teorema de Cauchy).
Teorema de Cauchy (Principio del argumento). Si un contorno en el plano s rodea Z ceros y
P polos de F(s) y no pasa a travs de ningn polo o cero de F(s) cuando el recorrido es en la
direccin del movimiento del reloj a lo largo de contorno s, el contorno correspondiente en el
plano F(s), rodea al origen de dicho plano,
veces en la misma direccin.
P Z N =
0
) (
) (
) ( 1 ) (
1
1
=
+ H
+ H
= + =
=
=
k
m
k
i
n
i
s s
s s k
s G s F
El criterio de Nyquist
Sea la ecuacin caracterstica
Para que el sistema sea estable, todos los ceros de F(s) deben de estar localizados en la parte
izquierda del plano s. Por tal motivo se escogen un contorno en el plano s que encierre toda la
parte derecha del plano y por medio del teorema de Cauchy se determina que ceros estn dentro
del contorno. Esto se logra graficando en el plano F(s) y observando el nmero de rodeos al
origen.
Sin embargo es ms comn utilizar el polinomio en lazo abierto G(s) por ser relativamente ms
sencillo, entonces:
+ = ) ( 1 ) ( s G s F
) ( 1 ) ( ) (
'
s G s F s F = =
) 0 1 ( j +
Con este cambio de variables los rodeos se analizan sobre el punto
del plano F(s)
F(s)
-1
Contorno de Nyquist.
Grfica polar de G(s).
Plano s
Plano F(s)
e j
o
u
jv
Criterio de estabilidad de Nyquist
Un sistema de retroalimentacin es estable si y solamente si, el contorno .
en el plano G(s) no rodea el punto (-1 +j 0) cuando el nmero de polos de G(s) en la
parte derecha del plano s es cero.
G
I
Un sistema de control con retroalimentacin es estable si y solamente si, en el
contorno el nmero de rodeos al punto (-1 +j 0) en el sentido contrario al
movimiento del reloj es igual al nmero de polos de G(s) con partes reales positivas.
G
I
G
I
s
I
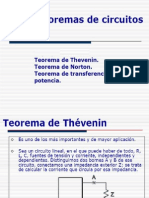
Estabilidad relativa y criterio de Nyquist
El criterio de estabilidad de Nyquist se define en trminos del punto . en la
grfica polar. La proximidad a ese punto determina la estabilidad relativa de un sistema.
) 0 1 ( j +
-1
u
jv
d
El margen de ganancia. Se define como el recproco de la ganancia .
para la frecuencia en que el ngulo de fase alcanza -180. .
El margen de ganancia es el factor por el cual se tendr que multiplicar la ganancia del
sistema para que el lugar geomtrico pase a travs del punto
.
) ( e j GH
). 0 1 ( j +
d
1
Margen de ganancia =
Otra medida de la estabilidad relativa es el margen de fase, que se define como el
ngulo de fase que se debe girar el lugar geomtrico para que el punto de
magnitud unitaria pase a travs del punto . en el plano
) ( e j GH
1 ) ( = e j GH
) 0 1 ( j +
). ( e j GH
-1
u
1 ) ( = e j GH
jv
f
mf | =
Margen de fase (mf )
Ejemplo:
Realice la grfica de Nyquist y determine el rango de estabilidad de:
) 5 )( 4 (
) (
+ +
=
s s s
K
s G
Solucin
Para realizar el contorno primero se divide el contorno en cuatro tramos:
s
I
G
I
Plano s
j e
o
s
I
+
= 0 e
j e
= 0 e
Tramo 1 (T1). Se evala la funcin desde la
frecuencia hasta , (grfica polar).
+
= 0 e
e
Tramo 2 (T2). Desde la frecuencia a la
frecuencia . En este caso se cambia la
variable s de la funcin por donde
representa un radio de valor infinito y es una
evaluacin angular de 90 a -90.
j e
j e
u j
e I
I
u j
e
Tramo 3 (T3). Se evala la funcin desde la
frecuencia hasta , (espejo de la
grfica polar).
= 0 e
j e
Contorno
s
I
1 T
2 T
3 T
4 T
Tramo 4 (T4). Desde la frecuencia a la
frecuencia . En este caso se cambia la
variable s de la funcin por donde
representa un radio de valor muy pequeo y es
una evaluacin angular de -90 a 90. El tramo se
disea para rodear a posibles ceros o polos en el
origen de la funcin a evaluar.
0 e
+
0 e
u
c
j
e
c
u j
e
T1. Se cambia en la funcin la variable s por y se obtiene la grfica polar
e j
e e e e
e e e
e
20 4 5
) 5 )( 4 (
) (
) 5 )( 4 (
) (
2 2 3
j j
K
j j j
K
j G
s s s
K
s G
+
=
+ +
=
+ +
=
se separa la parte real e imaginaria utilizando el complejo conjugado del denominador
) 20 ( 9
) 20 ( 9
) 20 ( 9
) (
2 2
2 2
2 2
e e e
e e e
e e e
e
+
=
j
j
j
K
j G
e e e
e
e e
e
400 41
) 20 (
400 41
9
) (
3 5
2
2 4
+ +
+ +
=
K
j
K
j G
Para obtener la grfica polar se evala la ecuacin resultante desde hasta
0 = e
e
0 = e
=
+ +
+ +
= j
K K
j
K
G
400
9
) 0 ( 400 ) 0 ( 41 ) 0 (
) ) 0 ( 20 (
400 ) 0 ( 41 ) 0 (
9
) 0 (
3 5
2
2 4
e
0 0
) ( 400 ) ( 41 ) (
) ) ( 20 (
400 ) ( 41 ) (
9
) 0 (
3 5
2
2 4
j
K
j
K
G + =
+ +
+ +
=
Nota. Si se tienen dudas acerca de las evaluaciones, se recomienda utilizar valores
muy pequeos para aproximar y valores muy grande de para aproximar
cuando
0 = e
e
. e
Entonces se tiene el punto de inicio y el punto final en la grfica polar.
0 = e
e
como a la frecuencia el valor es final es
, se tiene que la grfica polar llega a cero por el
cuadrante superior izquierdo. Como se inici en el
cuadrante inferior izquierdo, existe un cruce por el
eje real y su valor se obtiene al igualar a cero la
parte imaginaria de la ecuacin resultante:
0 0 j + e
e e e
e
400 41
) 20 (
0
3 5
2
+ +
=
K
j
20 = e =
2
20 0 e
y esta frecuencia se evala en la parte real
400 ) 20 ( 41 ) 20 (
9
) Re(
2 4
+ +
=
K
e
180
1
) Re(
K
= e
Se obtiene otro punto para la
grfica. Con ellos se dibuja de
manera aproximada la grfica
polar. (Nota: para una mejor
aproximacin de la grfica, se
pueden evaluar ms frecuencias)
j
180 K
Figura. Grfica polar.
jv
u
Respuesta en frecuencia
T2. Se cambia en la funcin la variable s por y se evala desde 90 a -90
u j
e I
) 5 )( 4 (
) (
+ +
=
s s s
K
s G
) 5 )( 4 (
) (
+ I + I I
=
u u u
e
j j j
e e e
K
j G
Infinito
Infinito
pequeo
pequeo
u
u u u u
e
3
3
0
) )( (
) (
j
j j j j
e
e
K
e e e
K
j G
~
I
~
I I I
=
Plano s
j e
o
s
I
+
= 0 e
j e
= 0 e
Contorno
s
I
2 T
El punto en el plano s mapea al punto .
en el plano F(s).
90 j
e I
90 ) 90 ( 3
0 0 =
j
e
El punto en el plano s mapea al punto .
en el plano F(s).
80 j
e
240
0
El punto en el plano s mapea al punto .
en el plano F(s).
30
j
e
90
0
Se evalan todos los puntos posible hasta deducir
que el tramo 2 forma en el plano F(s)
tres medias vueltas de radio cero empezando en 90 con direccin antihoraria.
jv
u
0 = radio
Plano F(s), tramo 2.
T3. Es el espejo de la grfica polar (tramo 1)
= 0 e
e
j
180 K
jv
u
Plano F(s), tramo 2.
T4. Se cambia en la funcin la variable s por y se evala desde -90 a 90
u
c
j
e
) 5 )( 4 (
) (
+ +
=
s s s
K
s G
) 5 )( 4 (
) (
+ +
=
u u u
u
c c c
c
j j j
j
e e e
K
e G
muy muy pequeo relativ, grande
u
u u
u
c c
c
j
j j
j
e
e
K
e
K
e G
~ = =
) 5 )( 4 (
) (
Plano s
j e
o
s
I
+
= 0 e
j e
= 0 e
Contorno
s
I
2 T
El punto en el plano s mapea al punto .
en elplano F(s).
90
e c
90
e
El punto en el plano s mapea al punto .
en elplano F(s).
45
e c
45
e
P
I
j
= 0 e
j
Plano F(s)
Contorno . Tramo 4.
P
I
0 = e
e
j
180
K
Figura. Grfica de Nyquist.
jv
u
T1
T3
T4
T2
1
Criterio de Nyquist:
Como el sistema no tiene polos inestables en
lazo abierto, para que sea estable se necesita
que no haya rodeos al punto -1. Entonces el
rango de estabilidad es
180 0 s s K
CONCLUSIN
Si la trayectoria de Nyquist en el plano s encierra Z
ceros y P polos de 1 + G(s)H(s) y no pasa por los
polos ni los ceros de 1 + G(s)H(s) conforme un
punto representativo s se mueve en el sentido de
las agujas del reloj a lo largo de la trayectoria de
Nyquist, el contorno correspondiente en el plano
G(s)H(s) rodea en un crculo N = Z P veces el
punto -1 + j0 en el sentido de las agujas del reloj.
(Los valores negativos de N implican rodeos en
sentido contrario al de las agujas del reloj)
Al examinar la estabilidad de los sistemas de control
lineales mediante el criterio de estabilidad de Nyquist, se
observa que se pueden presentar tres casos:
1. El punto -1 + j0 no est rodeado. Esto implica que el
sistema es estable si no hay polos de G(s)H(s) en el
semiplano derecho del plano s; de lo contrario, el
sistema es inestable
2. El punto -1 + j0 queda rodeado una o varias veces en
sentido contrario al de las agujas del reloj. En este caso,
el sistema es estable si el nmero de rodeos en sentido
contrario al de las agujas del reloj es igual al nmero de
polos G(s)H(s) en el semiplano derecho del plano s; de
lo contrario, el sistema es inestable
3. El punto -1 + j0 queda rodeado una o varias veces en el
sentido de las agujas del reloj. En este caso el sistema
es inestable
También podría gustarte
- Criterio de Estabilidad de Nyquist EXPONERDocumento22 páginasCriterio de Estabilidad de Nyquist EXPONERLuciano Ezequiel Quinto ContrerasAún no hay calificaciones
- Nyquist para Funciones de Fase Minima y No MinimaDocumento5 páginasNyquist para Funciones de Fase Minima y No MinimarxaviervaAún no hay calificaciones
- Registros de DesplazamientoDocumento17 páginasRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- Cuadro Comparativo VictorDocumento4 páginasCuadro Comparativo VictorJesPricilaAún no hay calificaciones
- Laboratorio de FiltrosDocumento17 páginasLaboratorio de FiltrosLuis Mendoza100% (1)
- 05 Ejercicios de Primer Orden Imagen AnxaDocumento11 páginas05 Ejercicios de Primer Orden Imagen AnxaOmar Asr AlejandroAún no hay calificaciones
- Acopladores Direccionales - Anillo HibridoDocumento20 páginasAcopladores Direccionales - Anillo HibridoPAPOFULEAún no hay calificaciones
- Laboratorio 4 Circuitos LogicosDocumento13 páginasLaboratorio 4 Circuitos LogicosAnonymous TsgakjAún no hay calificaciones
- MultivibradoresDocumento39 páginasMultivibradoresGabriel Alejandro Astete VargasAún no hay calificaciones
- Sistema electro-neumático de prácticas de laboratorio de automatización industrial de la Universidad de la GuajiraDocumento13 páginasSistema electro-neumático de prácticas de laboratorio de automatización industrial de la Universidad de la GuajiraMaria BrugesAún no hay calificaciones
- Sistema de Riego AutomaticoDocumento7 páginasSistema de Riego AutomaticoJoel Erico Escobar SalaAún no hay calificaciones
- El312ali2017 1Documento5 páginasEl312ali2017 1JonasJosTlasjianoAún no hay calificaciones
- EPC Manual de UsuarioDocumento81 páginasEPC Manual de UsuarioDeisy GuanochangaAún no hay calificaciones
- Fasores y circuitos LCR: análisis de amplitud y faseDocumento13 páginasFasores y circuitos LCR: análisis de amplitud y faseDavid MoraAún no hay calificaciones
- Pre Informe 2Documento9 páginasPre Informe 2retospAún no hay calificaciones
- Control de Motores DC Con Micro Control Adores PICDocumento8 páginasControl de Motores DC Con Micro Control Adores PICPatariki Gastón Mansilla0% (1)
- Comportamiento de Los TermistoresDocumento3 páginasComportamiento de Los TermistoresManuel MaqueraAún no hay calificaciones
- Introducción Al Criterio de NyquistDocumento6 páginasIntroducción Al Criterio de NyquistIon V Der VamcAún no hay calificaciones
- Electronica de Potencia Cap1Documento4 páginasElectronica de Potencia Cap1Javier Paredes SanchezAún no hay calificaciones
- MCT TiristorDocumento2 páginasMCT TiristorGonzalo ViñamaguaAún no hay calificaciones
- 11 Pantalla LCD 16x02 Con I2CDocumento4 páginas11 Pantalla LCD 16x02 Con I2CDamian RamirezAún no hay calificaciones
- SNubberDocumento7 páginasSNubberCarlos Eduardo SalazarAún no hay calificaciones
- Sensor de Temperatura Con LM35 y PIC16F877ADocumento20 páginasSensor de Temperatura Con LM35 y PIC16F877ADani IbarraAún no hay calificaciones
- Señales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDocumento73 páginasSeñales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDcuevase1Aún no hay calificaciones
- Practica 4Documento6 páginasPractica 4MiguelDuarteAún no hay calificaciones
- SCR C106D Practica 2 E4 PDFDocumento6 páginasSCR C106D Practica 2 E4 PDFDavidNavarroF100% (2)
- Guia Lab Sensores y Actuadores Lab 3 - 2019-2Documento21 páginasGuia Lab Sensores y Actuadores Lab 3 - 2019-2ramirez100% (1)
- 05 - Respuesta en El Tiempo de Un Sistema de Control ELTDocumento19 páginas05 - Respuesta en El Tiempo de Un Sistema de Control ELTanderdaAún no hay calificaciones
- Circuito Lógicos Con TransistoresDocumento3 páginasCircuito Lógicos Con TransistoresDiana Catalina JaimesAún no hay calificaciones
- Laboratorio 2 MicrocontrolDocumento3 páginasLaboratorio 2 MicrocontrolDayber CruzAún no hay calificaciones
- Ejercicios - Transformada DTFTDocumento9 páginasEjercicios - Transformada DTFTCarlos MarínAún no hay calificaciones
- Contadores y RegistrosDocumento32 páginasContadores y RegistrospepaAún no hay calificaciones
- Hacer Control de Temperatura para IncubadoraDocumento3 páginasHacer Control de Temperatura para IncubadoraMario Riquelme GuzmánAún no hay calificaciones
- Diseño y Estructura de Pic 18f877aDocumento26 páginasDiseño y Estructura de Pic 18f877aJhoel René Mamani HuancaAún no hay calificaciones
- Control de temperatura con PIDDocumento30 páginasControl de temperatura con PIDAlejandro LeonAún no hay calificaciones
- Etn-606 Lab 1 FinalDocumento5 páginasEtn-606 Lab 1 FinalandrieduAún no hay calificaciones
- Convertidor Tensión A CorrienteDocumento14 páginasConvertidor Tensión A CorrienteArmando VizOrAún no hay calificaciones
- Lógica CableadaDocumento4 páginasLógica CableadaRonald Barcia0% (1)
- Universidad Nacional de San Agustín de Arequipa: Sistemas Electrónicos AnálogosDocumento13 páginasUniversidad Nacional de San Agustín de Arequipa: Sistemas Electrónicos AnálogosPatrick Gilbert De la Cruz FloresAún no hay calificaciones
- 2da Practica PotenciaDocumento7 páginas2da Practica PotenciabrandoAún no hay calificaciones
- Termistor y amplificador inversorDocumento7 páginasTermistor y amplificador inversorDawn OsborneAún no hay calificaciones
- Diseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCDocumento10 páginasDiseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCOscar Dario Cristancho SaboyaAún no hay calificaciones
- Cuestionario 5 PDFDocumento9 páginasCuestionario 5 PDFAdriana RomerAún no hay calificaciones
- Ensayos de Vacío y Corto Circuito de Un Transformador 1ΦDocumento9 páginasEnsayos de Vacío y Corto Circuito de Un Transformador 1ΦJonathan PeñaAún no hay calificaciones
- Amplificadores de PeqDocumento10 páginasAmplificadores de PeqDaniela SevillaAún no hay calificaciones
- Ejercicios Propuestos TriacDocumento3 páginasEjercicios Propuestos TriacEdwin Alex Ovando SaavedraAún no hay calificaciones
- Circuitos secuenciales: biestables, contadores y registrosDocumento13 páginasCircuitos secuenciales: biestables, contadores y registrosManuel TapiaAún no hay calificaciones
- Cálculo de Un Transformador Monofásico de Pequeña PotenciaDocumento2 páginasCálculo de Un Transformador Monofásico de Pequeña PotenciaGonzalo CurielAún no hay calificaciones
- Margen de FaseDocumento5 páginasMargen de FaseJheyson Chuquispuma MagallanesAún no hay calificaciones
- Informe Practica Final FPGADocumento15 páginasInforme Practica Final FPGASilvi SilvidosAún no hay calificaciones
- Guion de Clase Analisis de La Respuesta TransitoriaDocumento7 páginasGuion de Clase Analisis de La Respuesta TransitoriaAlex GoreAún no hay calificaciones
- 1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDDocumento40 páginas1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDCondezoAún no hay calificaciones
- Informe Laboratorio 2Documento13 páginasInforme Laboratorio 2SantiagoAún no hay calificaciones
- Senoides y FasoresDocumento14 páginasSenoides y FasoresSamir SalazarAún no hay calificaciones
- Informe Previo Del Laboratorio 2 de Sistemas Digitales (Daniel)Documento7 páginasInforme Previo Del Laboratorio 2 de Sistemas Digitales (Daniel)Grecia Melissa Dionicio AntunezAún no hay calificaciones
- Osciladores DiscretosDocumento13 páginasOsciladores DiscretosXavier PalaciosAún no hay calificaciones
- NYQUISTDocumento40 páginasNYQUISTJuan Carlos Landa HuamactoAún no hay calificaciones
- Clase03 y 04-Diagrama de Nyquist-EstabilidadDocumento35 páginasClase03 y 04-Diagrama de Nyquist-EstabilidadAlex LinaresAún no hay calificaciones
- Criterio de Estabilidad de NyquistDocumento8 páginasCriterio de Estabilidad de NyquistsergzshAún no hay calificaciones
- SF101 Programacion ManualDocumento3 páginasSF101 Programacion ManualJovany SalazarAún no hay calificaciones
- Manual de Instalación SF101 PDFDocumento8 páginasManual de Instalación SF101 PDFZeret Lopez MartinezAún no hay calificaciones
- Electronica Analogica II - Unidad IDocumento23 páginasElectronica Analogica II - Unidad IJovany Salazar100% (1)
- Control II - Practica #2 (Unidad II)Documento8 páginasControl II - Practica #2 (Unidad II)Jovany SalazarAún no hay calificaciones
- Capitulo Muestra Cabero 8448156137 PDFDocumento16 páginasCapitulo Muestra Cabero 8448156137 PDFHuayna Practica AlegriaAún no hay calificaciones
- Electrónica Analógica II - Practica #6Documento9 páginasElectrónica Analógica II - Practica #6Jovany SalazarAún no hay calificaciones
- Dosificación Por Trimestres EspañolDocumento2 páginasDosificación Por Trimestres EspañolJovany SalazarAún no hay calificaciones
- Aula Telematica REDocumento70 páginasAula Telematica REeren73Aún no hay calificaciones
- Cuestionario Dificultades Del AprendizajeDocumento2 páginasCuestionario Dificultades Del AprendizajeJovany SalazarAún no hay calificaciones
- Cursos de CarreraDocumento19 páginasCursos de CarreraJovany SalazarAún no hay calificaciones
- Desarrollo y Evaluación de Proyectos - ProyectoDocumento19 páginasDesarrollo y Evaluación de Proyectos - ProyectoJovany SalazarAún no hay calificaciones
- Electronica Analogica II - Unidad IIIDocumento36 páginasElectronica Analogica II - Unidad IIIJovany SalazarAún no hay calificaciones
- Control II - Gráficas de Bode (Problemario)Documento6 páginasControl II - Gráficas de Bode (Problemario)Jovany SalazarAún no hay calificaciones
- Circuitos Eléctricos I - Unidad I (Practica #1)Documento3 páginasCircuitos Eléctricos I - Unidad I (Practica #1)Jovany SalazarAún no hay calificaciones
- Electrónica Analógica II - Practica #3Documento6 páginasElectrónica Analógica II - Practica #3Jovany SalazarAún no hay calificaciones
- Control II - Practica #3 (Unidad III)Documento15 páginasControl II - Practica #3 (Unidad III)Jovany SalazarAún no hay calificaciones
- Circuitos Eléctricos I - Unidad VDocumento24 páginasCircuitos Eléctricos I - Unidad VJovany SalazarAún no hay calificaciones
- Control II - Practica 1 (Unidad I)Documento12 páginasControl II - Practica 1 (Unidad I)Jovany SalazarAún no hay calificaciones
- Instrumentación - Unidad 5Documento6 páginasInstrumentación - Unidad 5Jovany SalazarAún no hay calificaciones
- Evaluación de Proyectos - Unidad 3Documento6 páginasEvaluación de Proyectos - Unidad 3Jovany SalazarAún no hay calificaciones
- Programación II - Ejemplos de ProgramasDocumento15 páginasProgramación II - Ejemplos de ProgramasJovany SalazarAún no hay calificaciones
- Desarrollo y Evaluacion de Proyectos - Unidad IDocumento5 páginasDesarrollo y Evaluacion de Proyectos - Unidad IJovany SalazarAún no hay calificaciones
- Programación II - Unidad 1Documento10 páginasProgramación II - Unidad 1Jovany SalazarAún no hay calificaciones
- Electrónica de Potencia - Reporte de Visita A Maquiladora Spellman High VoltajeDocumento6 páginasElectrónica de Potencia - Reporte de Visita A Maquiladora Spellman High VoltajeJovany SalazarAún no hay calificaciones
- Programación II - Unidad 2Documento22 páginasProgramación II - Unidad 2Jovany SalazarAún no hay calificaciones
- Electronica de Potencia - Practica 1 (Unidad II)Documento2 páginasElectronica de Potencia - Practica 1 (Unidad II)Jovany SalazarAún no hay calificaciones
- Control II - IntroducciónDocumento71 páginasControl II - IntroducciónJovany SalazarAún no hay calificaciones
- Evaluación de Proyectos - Unidad 3Documento6 páginasEvaluación de Proyectos - Unidad 3Jovany SalazarAún no hay calificaciones
- Evaluacion de Proyectos - Unidad IIDocumento5 páginasEvaluacion de Proyectos - Unidad IIJovany SalazarAún no hay calificaciones
- Distribucion de PresionesDocumento17 páginasDistribucion de PresionesNancy Maldonado MendozaAún no hay calificaciones
- Moscovita: propiedades, estructura y usos del mineral de mica potásicaDocumento21 páginasMoscovita: propiedades, estructura y usos del mineral de mica potásicaRouSe GascoAún no hay calificaciones
- Introduccion A La Programacion CNC Modulo I PDFDocumento19 páginasIntroduccion A La Programacion CNC Modulo I PDFJonathan ZárateAún no hay calificaciones
- Problemas de hidráulica y flujo de fluidosDocumento6 páginasProblemas de hidráulica y flujo de fluidosAlexia ZepedaAún no hay calificaciones
- Hacer Un Portón Levadizo No Es Tarea SencillaDocumento6 páginasHacer Un Portón Levadizo No Es Tarea Sencillanada de nada0% (1)
- SBM 300 EsDocumento2 páginasSBM 300 EsmegamAún no hay calificaciones
- Metalurgia Del AceroDocumento114 páginasMetalurgia Del AceroBiugest GingAún no hay calificaciones
- Tarea3 Jose Angel Acosta 31641017 MaqDocumento7 páginasTarea3 Jose Angel Acosta 31641017 MaqAngel Acosta TorresAún no hay calificaciones
- Derivada de La Función ArcosenoDocumento13 páginasDerivada de La Función Arcosenomarco martinezAún no hay calificaciones
- Prática ProteínasDocumento10 páginasPrática ProteínasMauricioAún no hay calificaciones
- TQO-semana9 Valverde1Documento48 páginasTQO-semana9 Valverde1GABRIEL MARINO MARTINEZ PARRAAún no hay calificaciones
- Cinética Química y Diseño de Reactores I Tercera Practica CalificadaDocumento4 páginasCinética Química y Diseño de Reactores I Tercera Practica CalificadaFlor MatiasAún no hay calificaciones
- Manual Diagrama Cableado Electrico Ewd Abreviaturas Glosario Componentes Conectores Mazo Cables Fuente AlimentacionDocumento24 páginasManual Diagrama Cableado Electrico Ewd Abreviaturas Glosario Componentes Conectores Mazo Cables Fuente AlimentacionOrlando Alvarado0% (2)
- Informe Laboratorio 4Documento6 páginasInforme Laboratorio 4Alejandro Delgado PerafanAún no hay calificaciones
- Fisica 2º Ciencias Exactas e InformáticaDocumento86 páginasFisica 2º Ciencias Exactas e InformáticaRosendo Gil50% (2)
- Triptico Tabla PeriodicaDocumento2 páginasTriptico Tabla PeriodicaAn Gel63% (8)
- Diseño muros corte edificios mediana alturaDocumento762 páginasDiseño muros corte edificios mediana alturaCarloss Ccotrina94% (17)
- Propuesta Ejercicios Unidad 1Documento6 páginasPropuesta Ejercicios Unidad 1Anonymous Y4YFzPT0Aún no hay calificaciones
- TP1Documento4 páginasTP1Pablo Canata0% (1)
- Alcohol BencilicoDocumento18 páginasAlcohol BencilicoJefferson F. CastroAún no hay calificaciones
- Fs 6060Documento32 páginasFs 6060Victor Raul Osnayo Mamani100% (4)
- Taller Segundo Corte Tópicos Avanzados de ControlDocumento2 páginasTaller Segundo Corte Tópicos Avanzados de ControlJhon RodriguezAún no hay calificaciones
- Aplicación Fuerza y Presión de Un LiquidoDocumento10 páginasAplicación Fuerza y Presión de Un LiquidoStiven GonzalezAún no hay calificaciones
- Capitulo 1 Campos Electricos 2021Documento22 páginasCapitulo 1 Campos Electricos 2021Jesús LeonardoAún no hay calificaciones
- Maduracion de PapayaDocumento7 páginasMaduracion de Papayapruebita123Aún no hay calificaciones
- PRÁCTICA No 1 PFQDocumento2 páginasPRÁCTICA No 1 PFQIsela_PradoAún no hay calificaciones
- Caracteristicas Hidraulicas y Geomorfologicas de Rios de MontañaDocumento4 páginasCaracteristicas Hidraulicas y Geomorfologicas de Rios de MontañaYsaias Choquegonza WiracochaAún no hay calificaciones
- TALLER 3-Guia + SoluciónDocumento3 páginasTALLER 3-Guia + SoluciónJavier Aedo ReyesAún no hay calificaciones
- Fase 3 Algebra LinealDocumento12 páginasFase 3 Algebra LinealEdinson Medina RiveraAún no hay calificaciones