También podría gustarte
- Aceleración de MaquinasDocumento26 páginasAceleración de MaquinasDaniel CanchigniaAún no hay calificaciones
- 07 VelocidadDocumento56 páginas07 VelocidadJORGE EDUARDO DE LA OSSA DORIAAún no hay calificaciones
- 4.2 Diagrama de Desplazamiento.Documento18 páginas4.2 Diagrama de Desplazamiento.GILBERT950Aún no hay calificaciones
- Analisis de Mecanismos (Velocidad)Documento24 páginasAnalisis de Mecanismos (Velocidad)oliver0% (1)
- 4.2 DIAGRAMA DE DESPLAZAMIENTOoDocumento17 páginas4.2 DIAGRAMA DE DESPLAZAMIENTOoGILBERT950Aún no hay calificaciones
- Resumen Del Cap 7Documento13 páginasResumen Del Cap 7Lupis Arvizu PichardoAún no hay calificaciones
- Lección 2.3Documento11 páginasLección 2.3Carlitos TorresAún no hay calificaciones
- Clase 9. MOVIMIENTO CIRCULAR UNIFORME VARIADODocumento14 páginasClase 9. MOVIMIENTO CIRCULAR UNIFORME VARIADORichard Icaro EsparzaAún no hay calificaciones
- 1305 e - 1P05 Movimiento AngularDocumento21 páginas1305 e - 1P05 Movimiento AngularSarahi DueñasAún no hay calificaciones
- Analisis de VelocidadDocumento14 páginasAnalisis de VelocidadKATEREAún no hay calificaciones
- 634694814233008750Documento29 páginas634694814233008750Kasumi ZcreamAún no hay calificaciones
- AceleracioDocumento34 páginasAceleraciovicuAún no hay calificaciones
- Análisis de Velocidad - Dinámica PDFDocumento14 páginasAnálisis de Velocidad - Dinámica PDFcarlos andres chaves santosAún no hay calificaciones
- Desplazamiento, Velocidad y AceleracionDocumento13 páginasDesplazamiento, Velocidad y Aceleracionmario gomez100% (1)
- El Movimiento Circular Uniforme Laboratorio de Fisica Universidad de CordobaDocumento7 páginasEl Movimiento Circular Uniforme Laboratorio de Fisica Universidad de CordobaKeyla DurangoAún no hay calificaciones
- 4.2 Levas (LECTURA)Documento13 páginas4.2 Levas (LECTURA)GILBERT950Aún no hay calificaciones
- Consulta Mcu y McuvDocumento11 páginasConsulta Mcu y McuvJonathan ObandoAún no hay calificaciones
- Movimiento Circular UniformeDocumento8 páginasMovimiento Circular UniformeKeyla DurangoAún no hay calificaciones
- Unidad 2 de Mecanica para La AutomatizaciónDocumento5 páginasUnidad 2 de Mecanica para La AutomatizaciónPeQeeña SemAún no hay calificaciones
- Estudio de La Dinamica Del Movimiento Circular Uniforme y Movimiento Circular Uniforme AceleradoDocumento4 páginasEstudio de La Dinamica Del Movimiento Circular Uniforme y Movimiento Circular Uniforme Aceleradodasd asdasdAún no hay calificaciones
- Laboratorio 5Documento5 páginasLaboratorio 5Jose ChoqueAún no hay calificaciones
- Practica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Documento7 páginasPractica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Abdiel MoralesAún no hay calificaciones
- Cap - LEVASDocumento13 páginasCap - LEVASPathy LamadridAún no hay calificaciones
- Asignacion CinematicaDocumento14 páginasAsignacion CinematicaEliecer Bello GarciaAún no hay calificaciones
- Clase 6Documento14 páginasClase 6Camilo SanabriaAún no hay calificaciones
- Proyecto Cinematica Final Definido 2doDocumento23 páginasProyecto Cinematica Final Definido 2doRuben Martin Del Campo SanchezAún no hay calificaciones
- Diagrama de DesplazamientoDocumento11 páginasDiagrama de DesplazamientoIvan Zamora100% (2)
- Analisis de Velocidad PDFDocumento13 páginasAnalisis de Velocidad PDFAladin FacturaciónAún no hay calificaciones
- Semana 10Documento17 páginasSemana 10Victor ChuraAún no hay calificaciones
- Movimiento Circular Trabajo de ExposicionDocumento30 páginasMovimiento Circular Trabajo de ExposicionLlirt Milla0% (1)
- Movimiento CurvilíneoDocumento17 páginasMovimiento CurvilíneoNAJIP LUIS VILLEGAS QUIÑONESAún no hay calificaciones
- McuDocumento8 páginasMcuJuanVchaAún no hay calificaciones
- Mov Circular InformeDocumento17 páginasMov Circular InformeAngel Niño SotoAún no hay calificaciones
- Resumen de LevasDocumento14 páginasResumen de LevasAmín Agustín AmuchAún no hay calificaciones
- Cinética Del Movimiento en Trayectoria Curva Con Sistemas de Referencia Tanto Cartesiano Como Normal.Documento13 páginasCinética Del Movimiento en Trayectoria Curva Con Sistemas de Referencia Tanto Cartesiano Como Normal.José ReyesAún no hay calificaciones
- MCU y MCUADocumento34 páginasMCU y MCUAMercy TilleriaAún no hay calificaciones
- 7) Movimiento CircularDocumento15 páginas7) Movimiento CircularDaniel SegoviaAún no hay calificaciones
- Presentacion Fis401 Clase9 RotacionDocumento24 páginasPresentacion Fis401 Clase9 RotacionpatricioAún no hay calificaciones
- Cinemática de La RotaciónDocumento23 páginasCinemática de La RotaciónBrenda RodriguezAún no hay calificaciones
- Movimiento Circular Uniformemente VariadoDocumento15 páginasMovimiento Circular Uniformemente VariadoSergio Gtz100% (1)
- Velocidad y Aceleracion AngularDocumento51 páginasVelocidad y Aceleracion Angularmario gomez100% (1)
- Cinemática 2D Parte 2 Capítulo 4: Física Admisiones ESPOL Ing. José David Jiménez M.SCDocumento31 páginasCinemática 2D Parte 2 Capítulo 4: Física Admisiones ESPOL Ing. José David Jiménez M.SCJonathanAún no hay calificaciones
- Laboratorio N 1Documento14 páginasLaboratorio N 1Cristian SolarteAún no hay calificaciones
- Momento AngularDocumento7 páginasMomento AngularLIMONAún no hay calificaciones
- Presentación de Marca Personal Acuarela Elegante y Minimalista Azul y RosaDocumento9 páginasPresentación de Marca Personal Acuarela Elegante y Minimalista Azul y RosaZaray AparicioAún no hay calificaciones
- Laboratorio de Fisica N 7Documento25 páginasLaboratorio de Fisica N 7Angelly ToscanoAún no hay calificaciones
- Velocidad AngularDocumento13 páginasVelocidad AngularJose MelgarejoAún no hay calificaciones
- Fisica Mcu Al LibroDocumento8 páginasFisica Mcu Al LibroLESLYEAún no hay calificaciones
- MCUV DiapositivasDocumento20 páginasMCUV DiapositivasGabriela GarciaAún no hay calificaciones
- Fisica 5841696549894Documento13 páginasFisica 5841696549894Alexander GalloAún no hay calificaciones
- Movimiento CircularDocumento20 páginasMovimiento CircularTapia Flores ErickAún no hay calificaciones
- Mov. Circular IABDocumento23 páginasMov. Circular IABEdgard Sebastian Mantilla TapiaAún no hay calificaciones
- Movimientos CircularesDocumento8 páginasMovimientos Circularesdii_franco4Aún no hay calificaciones
- Movimiento Circular UniformeDocumento10 páginasMovimiento Circular UniformesebastkmAún no hay calificaciones
- Velocidad AngularDocumento8 páginasVelocidad Angularelectricoupm95Aún no hay calificaciones
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Laborat Transf 3Documento8 páginasLaborat Transf 3Junior Paucar AnccoAún no hay calificaciones
- Sesión 03Documento12 páginasSesión 03Junior Paucar AnccoAún no hay calificaciones
- Circulo de Mhor1.1Documento41 páginasCirculo de Mhor1.1Junior Paucar AnccoAún no hay calificaciones
- FICHA DE TRABAJO Nº37 COMPUESTOS OXIG. Y NITR. 2 CyT 3ºDocumento4 páginasFICHA DE TRABAJO Nº37 COMPUESTOS OXIG. Y NITR. 2 CyT 3ºJunior Paucar AnccoAún no hay calificaciones
- SQA 8 Electronica Industrial IIDocumento5 páginasSQA 8 Electronica Industrial IIJunior Paucar AnccoAún no hay calificaciones
- Grupo 5 Alumno - Paucar Ancco Exposicon (VAN - TIR)Documento9 páginasGrupo 5 Alumno - Paucar Ancco Exposicon (VAN - TIR)Junior Paucar AnccoAún no hay calificaciones
- Ficha Activ7 EXP8 TERCER AÑODocumento3 páginasFicha Activ7 EXP8 TERCER AÑOJunior Paucar AnccoAún no hay calificaciones
- Ficha 4 Act 1 VII ComunicacionDocumento2 páginasFicha 4 Act 1 VII ComunicacionJunior Paucar AnccoAún no hay calificaciones
- Ficha 4 Act 3 VII ComunicacionDocumento4 páginasFicha 4 Act 3 VII ComunicacionJunior Paucar AnccoAún no hay calificaciones
- La Vida Es Sueño AnalisisDocumento2 páginasLa Vida Es Sueño AnalisisJunior Paucar AnccoAún no hay calificaciones
- Tarea 7 Vi - ADocumento2 páginasTarea 7 Vi - AJunior Paucar AnccoAún no hay calificaciones
- TRABAJO N°4 Placas PlanasDocumento14 páginasTRABAJO N°4 Placas PlanasJunior Paucar AnccoAún no hay calificaciones
- Elementos Curvos 1.0Documento23 páginasElementos Curvos 1.0Junior Paucar AnccoAún no hay calificaciones
- RISSTDocumento18 páginasRISSTJunior Paucar AnccoAún no hay calificaciones
- TUBERÍADocumento6 páginasTUBERÍAJunior Paucar AnccoAún no hay calificaciones
- Ejercicio 5Documento12 páginasEjercicio 5Junior Paucar AnccoAún no hay calificaciones
- Proyecto N05 - Placas PlanasDocumento37 páginasProyecto N05 - Placas PlanasJunior Paucar AnccoAún no hay calificaciones
- Cogollos Borrás, Santiago-Fundamentos de La Teoría de Filtros.-Editorial Universitat Politècnica de València (2016) PDFDocumento391 páginasCogollos Borrás, Santiago-Fundamentos de La Teoría de Filtros.-Editorial Universitat Politècnica de València (2016) PDFJosé Fco. VillegasAún no hay calificaciones
- INECUACIONES POLINÓMICAS y FRACCIONARIASDocumento6 páginasINECUACIONES POLINÓMICAS y FRACCIONARIASDiana Huaman ApaesteguiAún no hay calificaciones
- 13 Virtual Reporte Pendulo CompuestoDocumento27 páginas13 Virtual Reporte Pendulo CompuestoJessy HornaAún no hay calificaciones
- Teorema de ReciprocidadDocumento12 páginasTeorema de ReciprocidadRoly Pariona SilvaAún no hay calificaciones
- Movimiento Uniforme AceleradoDocumento8 páginasMovimiento Uniforme AceleradoOscar LancherosAún no hay calificaciones
- Simbolos Estadísticos 2Documento5 páginasSimbolos Estadísticos 2JM Pinto0% (2)
- Math 1102 ADocumento3 páginasMath 1102 AELMER SALDAÑA PEREZAún no hay calificaciones
- Ejercicios 1.1Documento4 páginasEjercicios 1.1Dimas Ramirez PortasAún no hay calificaciones
- ABCDocumento25 páginasABCTaty Toapanta50% (2)
- Corriente y ResistenciaDocumento17 páginasCorriente y ResistenciaAlicia Ormazábal LópezAún no hay calificaciones
- Madurez Del HormigónDocumento3 páginasMadurez Del Hormigónrrs_iceAún no hay calificaciones
- Descuento Simple,) Contenido Teorico y Problemas de La Misma)Documento10 páginasDescuento Simple,) Contenido Teorico y Problemas de La Misma)RafaelAún no hay calificaciones
- Álg Semestral Integral N°3 Aduni 2005Documento5 páginasÁlg Semestral Integral N°3 Aduni 2005Alex Flores OsorioAún no hay calificaciones
- Trabajo Escrito, Grupo 1, Ontologia El SerDocumento11 páginasTrabajo Escrito, Grupo 1, Ontologia El Servane huertasAún no hay calificaciones
- Espacio BlochDocumento127 páginasEspacio BlochEveraldoAún no hay calificaciones
- ExamenDocumento1 páginaExamenMara Lisette Martínez MejíaAún no hay calificaciones
- Consolidado de Matematica 1er CicloDocumento3 páginasConsolidado de Matematica 1er CicloLic Mariela Nunez VenturaAún no hay calificaciones
- Razonamiento Matematico 2012Documento1702 páginasRazonamiento Matematico 2012Fer SSz88% (16)
- Clase10 IntroduccionDocumento48 páginasClase10 IntroduccionCarlos Andres Gutierrez BautistaAún no hay calificaciones
- Practica 10Documento5 páginasPractica 10Jason CacuangoAún no hay calificaciones
- Sistemas de Comunicaciones II Practica#1Documento7 páginasSistemas de Comunicaciones II Practica#1Fabian CastilloAún no hay calificaciones
- La DerivadaDocumento4 páginasLa DerivadaBen Valca0% (1)
- FotoelasticidadDocumento7 páginasFotoelasticidadJoshua Arias CansinoAún no hay calificaciones
- Ejercicios de Calculo IntegralDocumento49 páginasEjercicios de Calculo IntegralJUAN PABLO HERN�NDEZ GUERREROAún no hay calificaciones
- TAREA 1.2 Organización de Un Conjunto de DatosDocumento7 páginasTAREA 1.2 Organización de Un Conjunto de DatosSantiago VelaAún no hay calificaciones
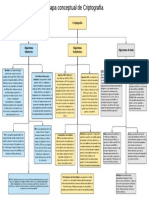
- Mapa Conceptual de CriptografíaDocumento1 páginaMapa Conceptual de CriptografíaAnonymous m1x0oMG50% (2)
- Ejercicios Propuestos Parcial 1Documento4 páginasEjercicios Propuestos Parcial 1Diana Zapata ZuluagaAún no hay calificaciones
- Tipos de Volcanes Segun Su ErupcionDocumento19 páginasTipos de Volcanes Segun Su ErupcionEFRAINAún no hay calificaciones
- Evaluación Potencias Notacion Cientifica Septimo BásicoDocumento3 páginasEvaluación Potencias Notacion Cientifica Septimo BásicodanielasanchezcastilloAún no hay calificaciones
- Rectificado Del CigüeñalDocumento18 páginasRectificado Del Cigüeñaljaun sos67% (3)