También podría gustarte
- Topología y geometría diferencial con aplicaciones a la físicaDe EverandTopología y geometría diferencial con aplicaciones a la físicaCalificación: 5 de 5 estrellas5/5 (1)
- Dirección de Calidad EducativaDocumento14 páginasDirección de Calidad EducativaJuan Danrley Rivas RodriguezAún no hay calificaciones
- Dirección de Calidad EducativaDocumento36 páginasDirección de Calidad EducativaLUIS ANTONY HUISA NINAAún no hay calificaciones
- 24 - Conversion de Puntos y EcuacionesDocumento8 páginas24 - Conversion de Puntos y EcuacionesMONICA MIGUEL MUCHAAún no hay calificaciones
- Dirección de Calidad EducativaDocumento8 páginasDirección de Calidad EducativaJuan Danrley Rivas RodriguezAún no hay calificaciones
- Clase 14 Y15 Cal2 2018-2Documento14 páginasClase 14 Y15 Cal2 2018-2OrlandoPerezValenciaAún no hay calificaciones
- Coordenadas PolaresDocumento22 páginasCoordenadas PolaresSebastián Muñoz ArredondoAún no hay calificaciones
- Anexo 09. Integrales Tirples1Documento59 páginasAnexo 09. Integrales Tirples1TnTAún no hay calificaciones
- Informe Sistema de Coordenadas PolaresDocumento21 páginasInforme Sistema de Coordenadas PolaresAmilcar RuizAún no hay calificaciones
- Polares Cal 2Documento22 páginasPolares Cal 2Shigeru GonzalesAún no hay calificaciones
- Clase 12-CIIDocumento34 páginasClase 12-CIIantoniamacuadaAún no hay calificaciones
- Áreas en coordenadas polaresDocumento19 páginasÁreas en coordenadas polaresVerónica FloresAún no hay calificaciones
- Contenido Tema 2.3Documento14 páginasContenido Tema 2.3JorgeMoises0% (1)
- Calculo Integral-PolaresDocumento14 páginasCalculo Integral-PolaresAldo Mendoza100% (1)
- Coordenadas Polares (Completo)Documento21 páginasCoordenadas Polares (Completo)Juan Jose Herrera Sequera60% (5)
- 1.2.3 - Coordenadas Cilíndricas y EsféricasDocumento15 páginas1.2.3 - Coordenadas Cilíndricas y EsféricasVictor ManuelAún no hay calificaciones
- Sesión 1-2 Cordenadas Cilíndricas y EsféricasDocumento17 páginasSesión 1-2 Cordenadas Cilíndricas y EsféricasMiguel Angel Sebastian AguirreAún no hay calificaciones
- Material 3Documento17 páginasMaterial 3Alan ArevaloAún no hay calificaciones
- Coord PolaresDocumento13 páginasCoord PolaresJonathan RuedaAún no hay calificaciones
- Coordenadas PolaresDocumento13 páginasCoordenadas PolaresIvan Escobar RochaAún no hay calificaciones
- Coordenadas polares en cálculo integralDocumento5 páginasCoordenadas polares en cálculo integralJimmy SantanderAún no hay calificaciones
- Lugares geométricos polaresDocumento36 páginasLugares geométricos polaresEzequiel BenitezAún no hay calificaciones
- Coordenadas cilíndricas y esféricas: descripción de regiones del espacioDocumento17 páginasCoordenadas cilíndricas y esféricas: descripción de regiones del espacioDaniel Gabriel HornaAún no hay calificaciones
- Sistemas CoordenadosDocumento6 páginasSistemas CoordenadosJonatan GilAún no hay calificaciones
- Cálculo Vectorial en R2 y R3Documento330 páginasCálculo Vectorial en R2 y R32895cronopioAún no hay calificaciones
- VectorialDocumento257 páginasVectorialJuanitaSierraAún no hay calificaciones
- MONOGRAFÍADocumento15 páginasMONOGRAFÍARonal Ramírez AlhuayAún no hay calificaciones
- 2022 Unidad 2 - Coordenadas PolaresDocumento35 páginas2022 Unidad 2 - Coordenadas PolaresGonzalo Prosen VespaAún no hay calificaciones
- RepasoExamen2 Geometr Aanal ticaII 2022 2Documento11 páginasRepasoExamen2 Geometr Aanal ticaII 2022 2Paulina Rosas ChávezAún no hay calificaciones
- Coordenadas Polares TrabajoDocumento25 páginasCoordenadas Polares TrabajolucaAún no hay calificaciones
- Ley de HookeDocumento9 páginasLey de HookeEmerson NewtonAún no hay calificaciones
- Tarea Areas PolaresDocumento17 páginasTarea Areas PolaresThe Best PapuAún no hay calificaciones
- Coordenadas polaresDocumento17 páginasCoordenadas polaresJose Jara AlekejosAún no hay calificaciones
- Tarea 27 ECUACIONES POLARES (Expo)Documento7 páginasTarea 27 ECUACIONES POLARES (Expo)Hot SauceAún no hay calificaciones
- Coordenadas PolaresDocumento29 páginasCoordenadas PolaresMarco Cisneros PachecoAún no hay calificaciones
- PPT12-Sistema de Coordenadas Polares (JJE)Documento41 páginasPPT12-Sistema de Coordenadas Polares (JJE)AARON_1982Aún no hay calificaciones
- Cord PolaDocumento14 páginasCord PolaPopi Gutierrez GarciaAún no hay calificaciones
- Teoria de Coordenadas PolaresDocumento3 páginasTeoria de Coordenadas Polareseliezer_jose100% (18)
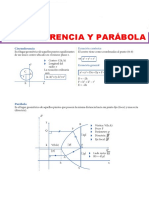
- Circunferencia y Parábola para Quinto Grado de SecundariaDocumento3 páginasCircunferencia y Parábola para Quinto Grado de SecundariamaxAún no hay calificaciones
- CBol 1 Curso 2022Documento2 páginasCBol 1 Curso 2022ingenauta7282Aún no hay calificaciones
- USM Geometría Analítica Guía Coordenadas PolaresDocumento2 páginasUSM Geometría Analítica Guía Coordenadas Polaresrho5223Aún no hay calificaciones
- Sem 14 - S3Documento11 páginasSem 14 - S3Juan Danrley Rivas RodriguezAún no hay calificaciones
- Semana 3. Sist Coord. en El Espacio PDFDocumento27 páginasSemana 3. Sist Coord. en El Espacio PDFNilson ChavezAún no hay calificaciones
- Hoja de Trabajo 1Documento10 páginasHoja de Trabajo 1ahalonsoAún no hay calificaciones
- Ecuaciones de circunferencias y parábolasDocumento4 páginasEcuaciones de circunferencias y parábolasMusic and LyricsAún no hay calificaciones
- Circunferencia y Parábola para Quinto Grado de SecundariaDocumento4 páginasCircunferencia y Parábola para Quinto Grado de SecundariaCaleb VengoaAún no hay calificaciones
- Momento de Inercia, Transformación de CoordenadasDocumento8 páginasMomento de Inercia, Transformación de CoordenadasJofre CastilloAún no hay calificaciones
- Coordenadas CilindricasDocumento5 páginasCoordenadas CilindricasVládimir SōryūAún no hay calificaciones
- 7 Coordenadas PolaresDocumento14 páginas7 Coordenadas PolaresCésar David Aguilera RojasAún no hay calificaciones
- Area de Una Region PlanaDocumento4 páginasArea de Una Region PlanaNelson Mendoza huyhuaAún no hay calificaciones
- Agm de Mate Coordenadas ViernDocumento23 páginasAgm de Mate Coordenadas ViernMelanie MorenoAún no hay calificaciones
- COORDENADAS POLARESDocumento29 páginasCOORDENADAS POLARESPEDRO ROLANDO ESPINOZA ZUNIGAAún no hay calificaciones
- Sesión 2 - Coord y Gráficos de Ec. PolaresDocumento25 páginasSesión 2 - Coord y Gráficos de Ec. PolaresYisela Esther Alvarez VilladiegoAún no hay calificaciones
- Trigo 3roDocumento86 páginasTrigo 3roJOSE ANTONY QUISPE PAITANAún no hay calificaciones
- CoordenadasPolaresDocumento9 páginasCoordenadasPolaresjuana menemoloAún no hay calificaciones
- Clase 4.1coordenadas Esfericas y CilindricasDocumento13 páginasClase 4.1coordenadas Esfericas y CilindricasSanthier Mosquera AmpudiaAún no hay calificaciones
- Las Transformaciones...Documento10 páginasLas Transformaciones...Javier Yribarren MondejarAún no hay calificaciones
- 7.1 Resumen 7 (Sistemas de Coordenadas)Documento7 páginas7.1 Resumen 7 (Sistemas de Coordenadas)miguelAún no hay calificaciones
- EXAMEN FINAL 2021-0 QUIMICA 2 VirtualDocumento2 páginasEXAMEN FINAL 2021-0 QUIMICA 2 VirtualBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- EXAMEN FINAL 2021-0 QUIMICA 2 VirtualblasDocumento5 páginasEXAMEN FINAL 2021-0 QUIMICA 2 VirtualblasBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Producto Academico N°2 IntroDocumento16 páginasProducto Academico N°2 IntroBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Pa3 MercadotecniaDocumento5 páginasPa3 MercadotecniaBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Curso Ruedas Neumaticos Componentes Caracteristicas Funciones Banda Talon Carcasa Cubierta Diagonal Radiales PerfilDocumento44 páginasCurso Ruedas Neumaticos Componentes Caracteristicas Funciones Banda Talon Carcasa Cubierta Diagonal Radiales PerfilBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Manual Unidad 1.vfDocumento23 páginasManual Unidad 1.vfCarmen luz Fernández balbinAún no hay calificaciones
- Tarea Colaborativa: Atención, Escucha y ApreciaciónDocumento4 páginasTarea Colaborativa: Atención, Escucha y ApreciaciónBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Comunicación y Argumentación PA2Documento4 páginasComunicación y Argumentación PA2BLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Pageometria 03 - TareaDocumento19 páginasPageometria 03 - TareaBLAS MARQUINO LESCANO SALINASAún no hay calificaciones
- Hoja de Vida FDCDocumento39 páginasHoja de Vida FDCHarold Eliecer Leiva LeivaAún no hay calificaciones
- Explorando sonidos en la músicaDocumento2 páginasExplorando sonidos en la músicarodrigoAún no hay calificaciones
- 0123 9392 Inf 24 03 s1 186 PDFDocumento123 páginas0123 9392 Inf 24 03 s1 186 PDFJuliethAún no hay calificaciones
- Tarea 3 de Evaluacion de La InteligenciaDocumento7 páginasTarea 3 de Evaluacion de La InteligenciaEridania Delgado DiazAún no hay calificaciones
- Taller de Matematica - Aprendizajes Del IV - V CicloDocumento10 páginasTaller de Matematica - Aprendizajes Del IV - V CicloRoy Camacho ZuñigaAún no hay calificaciones
- Tesis Determinacion de La Demanda de AguaDocumento15 páginasTesis Determinacion de La Demanda de AguaAlbert Fernando Quilla MéndezAún no hay calificaciones
- Tipos de Informes de AuditoriaDocumento11 páginasTipos de Informes de AuditoriaLiz CamachoAún no hay calificaciones
- Manual Curiso GisDocumento98 páginasManual Curiso GisRichard2023Aún no hay calificaciones
- 1 5102799044640506032Documento6 páginas1 5102799044640506032Itachi AkatsukiAún no hay calificaciones
- Hidrocoloides IrreversiblesDocumento30 páginasHidrocoloides IrreversiblesShantal VelezAún no hay calificaciones
- La Recta 1Documento16 páginasLa Recta 1Henry Jaime Villalba LópezAún no hay calificaciones
- Reglamento de Correspondencia y de ArchivoDocumento28 páginasReglamento de Correspondencia y de ArchivoFonseca MileAún no hay calificaciones
- Base de Datos Instrumentos de Salud MentalDocumento17 páginasBase de Datos Instrumentos de Salud MentalPaolaBazan100% (1)
- Personajes conceptuales en Deleuze y NietzscheDocumento9 páginasPersonajes conceptuales en Deleuze y NietzschePablo Eugenio FernandezAún no hay calificaciones
- Manual StrettoDocumento52 páginasManual StrettoMauricio LeonAún no hay calificaciones
- Clave Dicotomica Cinco ReinosDocumento16 páginasClave Dicotomica Cinco Reinosdoremifa1995Aún no hay calificaciones
- Ejercicos Resueltos Unidad 2.1Documento15 páginasEjercicos Resueltos Unidad 2.1Karen GarciaAún no hay calificaciones
- 1489 AminofilinaDocumento5 páginas1489 AminofilinaDAYMO QUISPE CAYTANOAún no hay calificaciones
- Modelo CanvasDocumento23 páginasModelo CanvasRocío Isidora Jara100% (1)
- La Locura Del Solucionismo TecnologicoDocumento2 páginasLa Locura Del Solucionismo TecnologicoHERNAN DARIO HERNANDEZ QUINTEROAún no hay calificaciones
- Catalogo - Sellos Quimicos MODELODocumento2 páginasCatalogo - Sellos Quimicos MODELOJors SanzAún no hay calificaciones
- Desviaciones Sexuales - ParafiliaDocumento13 páginasDesviaciones Sexuales - ParafiliaYeny CastroAún no hay calificaciones
- Ejeplo de Suma de MatricesDocumento1 páginaEjeplo de Suma de Matricesomar corralAún no hay calificaciones
- Charles SpurgeonDocumento42 páginasCharles SpurgeonMario Casanoves100% (1)
- Temario Del Curso de UltrasonidoDocumento2 páginasTemario Del Curso de UltrasonidoJesus R. AguileraAún no hay calificaciones
- AF M10 1S1718 3 SoluciC3B3nDocumento11 páginasAF M10 1S1718 3 SoluciC3B3nLaura DiazAún no hay calificaciones
- Sustentacion Trabajo Colaborativo - Escenario 7 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo II - (Grupo b01)Documento4 páginasSustentacion Trabajo Colaborativo - Escenario 7 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo II - (Grupo b01)Alejo HernandezAún no hay calificaciones
- Medidas univariantes para lesionadosDocumento10 páginasMedidas univariantes para lesionadosmiguelitux martinez0% (1)
- Cronograma Prácticos - LUNESDocumento5 páginasCronograma Prácticos - LUNESjtvaldes100% (1)
- Cake PHP CookbookDocumento232 páginasCake PHP CookbookfilippototiAún no hay calificaciones