También podría gustarte
- Mantenimiento, preparación y manejo de tractores. AGAF0108De EverandMantenimiento, preparación y manejo de tractores. AGAF0108Aún no hay calificaciones
- Actuadores2 PresentacionDocumento46 páginasActuadores2 PresentacionChristinneherreraAún no hay calificaciones
- Informe de Analisis Marvin JimenezDocumento5 páginasInforme de Analisis Marvin JimenezAilyn UlloaAún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Resumen de Actuadores Electricos y MecanicosDocumento6 páginasResumen de Actuadores Electricos y MecanicosJazzme100% (11)
- Operatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209De EverandOperatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209Aún no hay calificaciones
- Morfología de Los Robots IndustrialesDocumento21 páginasMorfología de Los Robots IndustrialesKevin CastilloAún no hay calificaciones
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- ActuadoresDocumento39 páginasActuadoresbErnArd fELizAún no hay calificaciones
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209De EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Aún no hay calificaciones
- Robotica Apl NeumaDocumento49 páginasRobotica Apl NeumaAle OMAún no hay calificaciones
- Tema 42Documento12 páginasTema 42vdepradoAún no hay calificaciones
- Presentation 2Documento17 páginasPresentation 2LUIS ANGEL GONZALEZ LOPEZAún no hay calificaciones
- Elementos Finales de Control o ActuadoresDocumento11 páginasElementos Finales de Control o ActuadoresBerenice GuzmanAún no hay calificaciones
- ActuadoresDocumento12 páginasActuadoresAntonio75% (4)
- 4 220921121208 4c460f6cDocumento24 páginas4 220921121208 4c460f6cVenedith Riios ChairezAún no hay calificaciones
- Introducción A La RoboticaDocumento31 páginasIntroducción A La RoboticahaguilarAún no hay calificaciones
- Actuadores Exposicion PDFDocumento13 páginasActuadores Exposicion PDFJean Carlos MuñizAún no hay calificaciones
- 2 ActuadoresDocumento19 páginas2 ActuadoresOflodor OrniAún no hay calificaciones
- Dispositivos de SalidaDocumento11 páginasDispositivos de SalidaMaria Elena SamudioAún no hay calificaciones
- 5.3.1 Actuadores Mecanicos - Instrumentacion y ControlDocumento4 páginas5.3.1 Actuadores Mecanicos - Instrumentacion y ControlSaul D.G0% (1)
- Clase Control MotoresDocumento26 páginasClase Control MotoresShirley Jimenez MacíasAún no hay calificaciones
- UNIDAD 6 ActuadoresDocumento13 páginasUNIDAD 6 ActuadoresnardajtAún no hay calificaciones
- Semana4 ActuadoresDocumento44 páginasSemana4 ActuadoresManuel Sanchez CheroAún no hay calificaciones
- Estructura Mecanica y Elementos Motores-Jose OvallesDocumento16 páginasEstructura Mecanica y Elementos Motores-Jose OvallesJ_OvallesAún no hay calificaciones
- Sistemas Cableados Vs ProgramadosDocumento6 páginasSistemas Cableados Vs ProgramadosALBERTO DAVID CARMONA MARTÍNEZAún no hay calificaciones
- Sistemas Programables (Actuadores)Documento6 páginasSistemas Programables (Actuadores)Somx Duraznho Di ManzanithaAún no hay calificaciones
- 5.3 Servomotores PDFDocumento11 páginas5.3 Servomotores PDFDaniel SánchezAún no hay calificaciones
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 páginasAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroAún no hay calificaciones
- Actuadores de ControlDocumento27 páginasActuadores de ControlArsenio GarciaAún no hay calificaciones
- Actividad Integradora Robotica Unidad 1Documento12 páginasActividad Integradora Robotica Unidad 1Alejandro GarciaAún no hay calificaciones
- ActuadoresDocumento12 páginasActuadoresMars SaladaAún no hay calificaciones
- ACTUADORESDocumento4 páginasACTUADORESBrianAún no hay calificaciones
- Elementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaDocumento30 páginasElementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaWilmer YtAún no hay calificaciones
- Ensayofs ServosDocumento5 páginasEnsayofs Servosbladimirtipan405Aún no hay calificaciones
- ACTUADORESDocumento4 páginasACTUADORESANDRES BARREIROAún no hay calificaciones
- A Ctu AdoresDocumento12 páginasA Ctu AdoresLORENZO ANTONIO ESPINOZA ALEJOAún no hay calificaciones
- Automatismos Hidraulicos 03 - IES - 12-09-23Documento21 páginasAutomatismos Hidraulicos 03 - IES - 12-09-23Lopez FerAún no hay calificaciones
- Tipos de Actuadores en RobotsDocumento2 páginasTipos de Actuadores en RobotsAniita Ariass FloressAún no hay calificaciones
- Actividad 4 Tipos de Actuadores y Shield Puente HDocumento20 páginasActividad 4 Tipos de Actuadores y Shield Puente HLuis Daniel Barraza MartinezAún no hay calificaciones
- T8 IyC 5V EHAIDocumento11 páginasT8 IyC 5V EHAIALEXIS IVAN ESCOBEDO HERRERAAún no hay calificaciones
- ActuadoresDocumento30 páginasActuadoresmanuel_avalos_21Aún no hay calificaciones
- A Ctu AdoresDocumento6 páginasA Ctu AdoresMarcos ZurcAún no hay calificaciones
- Resumen de NeumaticaDocumento17 páginasResumen de NeumaticaEdgar ZuñigaAún no hay calificaciones
- ExpoDocumento30 páginasExpostrummaticjonazAún no hay calificaciones
- ActuadoresDocumento10 páginasActuadoresANDY RAMOS BARRÓN100% (1)
- OSHN Unidad 2Documento8 páginasOSHN Unidad 2luis.reyesc.acad295Aún no hay calificaciones
- Tema 1 - Sistemas HidraulicosDocumento44 páginasTema 1 - Sistemas HidraulicosmedievoloAún no hay calificaciones
- UD9 Soldadura de RobotDocumento39 páginasUD9 Soldadura de RobotCristian Viqueira carnotaAún no hay calificaciones
- Selección de Actuadores HidráulicosDocumento18 páginasSelección de Actuadores Hidráulicosferminhernandez0% (1)
- Ensayo de NeumáticaDocumento3 páginasEnsayo de NeumáticaZen JC100% (2)
- Variador de VelocidadDocumento3 páginasVariador de VelocidadMarcooFleexAún no hay calificaciones
- Actuadores y DiferenciasDocumento6 páginasActuadores y DiferenciasCarlos RodriguezAún no hay calificaciones
- Controladores Electromecánicos Fasiculo 1Documento32 páginasControladores Electromecánicos Fasiculo 1LiNo M. MejíaAún no hay calificaciones
- A1 - Martinez Calderon Alondra SarahiDocumento18 páginasA1 - Martinez Calderon Alondra SarahiMarcos MartinezAún no hay calificaciones
- Reporte Medios Internos y Externos de Las Máquinas HerramientaDocumento3 páginasReporte Medios Internos y Externos de Las Máquinas HerramientaMery RamirezAún no hay calificaciones
- 4 2control-SeparadoDocumento13 páginas4 2control-SeparadoJose Antonio Vargas Mtz50% (2)
- Mcintyre R L - Control de Motores ElectricosDocumento115 páginasMcintyre R L - Control de Motores Electricosnside1100% (1)
- Proyecto OleoDocumento6 páginasProyecto OleoGabriel RoldánAún no hay calificaciones
- Sesion13 Lenguajes de Programacion PLCDocumento12 páginasSesion13 Lenguajes de Programacion PLCFabian AlejandroAún no hay calificaciones
- Sesion12 Lenguajes de Programacion CNCDocumento13 páginasSesion12 Lenguajes de Programacion CNCFabian AlejandroAún no hay calificaciones
- Sesion10 - Robotica Integrada A La ManufacturaDocumento9 páginasSesion10 - Robotica Integrada A La ManufacturaFabian AlejandroAún no hay calificaciones
- Sesion09 - Metodologias IBM NIST SIEMENSDocumento16 páginasSesion09 - Metodologias IBM NIST SIEMENSFabian AlejandroAún no hay calificaciones
- InmarDocumento4 páginasInmarFermin ChuruguacoAún no hay calificaciones
- Cuaderno de InformesDocumento12 páginasCuaderno de InformesAlejandro Luna100% (1)
- Encuesta LavaderoDocumento2 páginasEncuesta Lavaderodanny molinaAún no hay calificaciones
- Tarjeta Circulacion ElectronicaDocumento1 páginaTarjeta Circulacion ElectronicaKeiner ArreagaAún no hay calificaciones
- Proyecto Motor de AguaDocumento8 páginasProyecto Motor de AguaLUIS MIGUEL ROSALES CHUJANDAMAAún no hay calificaciones
- MANUAL DE REPARO TIER III MOTOR CNH Pag 1 A 163 PDFDocumento542 páginasMANUAL DE REPARO TIER III MOTOR CNH Pag 1 A 163 PDFDaniel Alvarado100% (7)
- Seguridad VialDocumento44 páginasSeguridad VialMiguel Eduardo100% (2)
- Relevador Finder 329Documento2 páginasRelevador Finder 329Ignacio NashAún no hay calificaciones
- Ajuste de CorreasDocumento50 páginasAjuste de CorreasFALCONIANA DE VÍVERES Y SERVICIOS C.AAún no hay calificaciones
- Ga9020rkd 3Documento2 páginasGa9020rkd 3ddzako9140Aún no hay calificaciones
- New Swift 2021Documento2 páginasNew Swift 2021TomAndersonAún no hay calificaciones
- Evaluacion Retroexcavadora 420E 2Documento8 páginasEvaluacion Retroexcavadora 420E 2jjgalvisAún no hay calificaciones
- CRVDocumento22 páginasCRVANTONIO PAUL SALINAS PORTILLAAún no hay calificaciones
- Tarea #2Documento3 páginasTarea #2clan mthAún no hay calificaciones
- Electro HidráulicaDocumento2 páginasElectro HidráulicaAlex Coronado SaucedoAún no hay calificaciones
- Detalle de Cuadro Mantención - Twinch 30.2 - Kv.1Documento9 páginasDetalle de Cuadro Mantención - Twinch 30.2 - Kv.1Alexis Duvan Hernadez ArayaAún no hay calificaciones
- 6285547787.1 es-MX Operation FlexiROC D50 - D55 - D60 - D65 Tier 3Documento220 páginas6285547787.1 es-MX Operation FlexiROC D50 - D55 - D60 - D65 Tier 3miguel taipe100% (1)
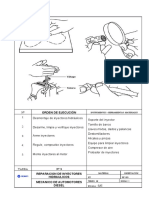
- Hoja de Proceso Tarea 3 BroncanoDocumento6 páginasHoja de Proceso Tarea 3 BroncanoDaniel Angelo Tarazona LeivaAún no hay calificaciones
- DupontDocumento42 páginasDupontLauraRomeroAún no hay calificaciones
- Nueva Generación de Ford Ranger (002) SPDocumento51 páginasNueva Generación de Ford Ranger (002) SPCibin Francisco MateoAún no hay calificaciones
- NRC4717 Mendoza S D5Documento4 páginasNRC4717 Mendoza S D5SEBASTIAN ALEJANDRO MENDOZA GARCIAAún no hay calificaciones
- Comprobar El Nivel de Líquido y Drenar-RellenarDocumento8 páginasComprobar El Nivel de Líquido y Drenar-RellenarXAVI weboAún no hay calificaciones
- Manual CAZADOR POLITICAS PDFDocumento17 páginasManual CAZADOR POLITICAS PDFJohana GavilanAún no hay calificaciones
- Noveno Tecnología e InformáticaDocumento3 páginasNoveno Tecnología e InformáticaMegamed2000Aún no hay calificaciones
- Ciclo Otto Real - Ciclo Otto Ideal.Documento4 páginasCiclo Otto Real - Ciclo Otto Ideal.Gama Garcia Yair AlejandroAún no hay calificaciones
- Sección 2 SISTEMA DE COMBUSTIBLE Y REGULADORESDocumento203 páginasSección 2 SISTEMA DE COMBUSTIBLE Y REGULADORESWilliamAún no hay calificaciones
- Luces PosterioresDocumento15 páginasLuces Posterioresllosi pamelaAún no hay calificaciones
- Nissan 2021 March CatalogoDocumento9 páginasNissan 2021 March Catalogoibrahim perez san martinAún no hay calificaciones
- PD Tte Mecanica AutomotrizDocumento3 páginasPD Tte Mecanica AutomotrizMari Chiri Mamani100% (1)
- Prepa6me Quinga Francisco GrupoaDocumento5 páginasPrepa6me Quinga Francisco GrupoaQuinga FranciscoAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaDe EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezCalificación: 4 de 5 estrellas4/5 (3)
- Aprender HTML5, CSS3 y Javascript con 100 ejereciosDe EverandAprender HTML5, CSS3 y Javascript con 100 ejereciosCalificación: 5 de 5 estrellas5/5 (2)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Electrocardiograma desde una visión digitalDe EverandElectrocardiograma desde una visión digitalCalificación: 4 de 5 estrellas4/5 (1)