También podría gustarte
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Norma ASARCODocumento3 páginasNorma ASARCOJorge Mauricio Levet100% (13)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Evaluacion Sistema de Gestión de La Seguridad - ScribdDocumento7 páginasEvaluacion Sistema de Gestión de La Seguridad - ScribdOrlando Enrique Velasquez Morales100% (1)
- RoboticaDocumento113 páginasRoboticaRafael RodriguezAún no hay calificaciones
- Centrales Termoeléctricas ConvencionalesDocumento94 páginasCentrales Termoeléctricas ConvencionalesJuanmencias173Aún no hay calificaciones
- Bombas de VacioDocumento4 páginasBombas de VacioUriel Martinez100% (1)
- 5 CavitacionDocumento72 páginas5 CavitacionEdgardo García NavarroAún no hay calificaciones
- Compresores de PistónDocumento26 páginasCompresores de PistónD Gallo GarciaAún no hay calificaciones
- Informe Final Kevin Pantoja CastilloDocumento20 páginasInforme Final Kevin Pantoja CastillolixemAún no hay calificaciones
- Invernadero Inteligente Con PLC S PDFDocumento8 páginasInvernadero Inteligente Con PLC S PDFJonathan DiazAún no hay calificaciones
- CirosRobotics 2013 I HSDocumento50 páginasCirosRobotics 2013 I HSDaniel Henao SantanaAún no hay calificaciones
- Administracion de Procesos IIDocumento36 páginasAdministracion de Procesos IIanon_711940956Aún no hay calificaciones
- Control ON-OFF: Características y ejemplos del control de dos posicionesDocumento3 páginasControl ON-OFF: Características y ejemplos del control de dos posicionesClau RoblesAún no hay calificaciones
- Interruptor de Estado SólidoDocumento4 páginasInterruptor de Estado SólidoMichellelelelele Galicia100% (1)
- Motores EspecialesDocumento10 páginasMotores EspecialesLuis Ángel Ramirez NavaAún no hay calificaciones
- Caldera 2016 InformeDocumento13 páginasCaldera 2016 InformechristianAún no hay calificaciones
- Word SiseDocumento49 páginasWord Sise30409413050% (2)
- Presentacion de Motores TrifasicosDocumento14 páginasPresentacion de Motores TrifasicosFranklin PintoAún no hay calificaciones
- GastonDocumento9 páginasGastonLópez SantiagoAún no hay calificaciones
- 3.1 - 3.3 ActuadoresDocumento40 páginas3.1 - 3.3 ActuadoresSG Manuel JuanAún no hay calificaciones
- Células FotovoltáicasDocumento8 páginasCélulas FotovoltáicasrodrigovabAún no hay calificaciones
- Metrología Del MotorDocumento4 páginasMetrología Del MotorJUAN JOSE PRADA PUENTESAún no hay calificaciones
- MicrocontroladorDocumento29 páginasMicrocontroladorJesus Alberto HervertAún no hay calificaciones
- Clasificación de Los ActuadoresDocumento2 páginasClasificación de Los ActuadoresLemuel TrujilloAún no hay calificaciones
- BOMBAS MejoradaDocumento42 páginasBOMBAS MejoradaMiguel v.m.100% (1)
- Bomba CentrífugaDocumento25 páginasBomba Centrífugarosario huamánAún no hay calificaciones
- Sensor UltrasónicoDocumento9 páginasSensor UltrasónicofaserzoneAún no hay calificaciones
- PWM 555Documento5 páginasPWM 555HuGo R. MejoraDoAún no hay calificaciones
- Cargador de Bateria ConceptoDocumento25 páginasCargador de Bateria ConceptoLuis Enrique Halsey GutierrezAún no hay calificaciones
- Motor ShuntDocumento8 páginasMotor ShuntJorge Isaac Del Rosario AcostaAún no hay calificaciones
- Familia Microcontroladores Atmel y MotorolaDocumento16 páginasFamilia Microcontroladores Atmel y MotorolaAntony Horna TrejoAún no hay calificaciones
- U1. Fundamentos de Controles Eléctricos PDFDocumento22 páginasU1. Fundamentos de Controles Eléctricos PDFKelly RamosAún no hay calificaciones
- Emprendedorismo Plan de Negocio Cosechadora de PapasDocumento74 páginasEmprendedorismo Plan de Negocio Cosechadora de PapasAlejandro MennucciAún no hay calificaciones
- Arranque de Motores Estrella TrianguloDocumento3 páginasArranque de Motores Estrella TrianguloshenseyAún no hay calificaciones
- Electronica Automotriz 01Documento5 páginasElectronica Automotriz 01Sandro Marvín Salazar QuintanillaAún no hay calificaciones
- Variador de FrecuenciaDocumento4 páginasVariador de FrecuenciaThomas ParkerAún no hay calificaciones
- Manual de Usuario ISPOTDocumento93 páginasManual de Usuario ISPOTRay Con dAún no hay calificaciones
- Sensores y ActuadoresDocumento11 páginasSensores y ActuadoresXAbelx TNAún no hay calificaciones
- Sensores de Caudal (2018.05.31)Documento15 páginasSensores de Caudal (2018.05.31)jordan poma curiAún no hay calificaciones
- Frenos ABSDocumento1 páginaFrenos ABSc3c3Aún no hay calificaciones
- Funcionamiento bombas reciprocantesDocumento9 páginasFuncionamiento bombas reciprocantesheydicruzAún no hay calificaciones
- Ejercicios de Calibración de Aspersora AgrícolaDocumento1 páginaEjercicios de Calibración de Aspersora Agrícolaobed biurquezAún no hay calificaciones
- Gatas HidráulicasDocumento4 páginasGatas HidráulicasMercado Encinas AndrésAún no hay calificaciones
- Que Es Motores BrushlessDocumento3 páginasQue Es Motores BrushlessGabrielAún no hay calificaciones
- Sensores InductivosDocumento53 páginasSensores InductivosHamilton AnguetaAún no hay calificaciones
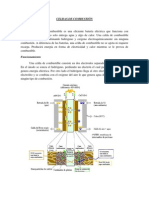
- Celdas de CombustiónDocumento6 páginasCeldas de CombustiónLis18Aún no hay calificaciones
- 3 Tipos de SensoresDocumento16 páginas3 Tipos de SensoresJonathan David Bonilla ArciniegasAún no hay calificaciones
- Programación del relé Zelio desde el tecladoDocumento21 páginasProgramación del relé Zelio desde el tecladoArturo FuentesAún no hay calificaciones
- TermistoresDocumento3 páginasTermistoresSandy Lorena Trauco SalazarAún no hay calificaciones
- Cuestionario 5 OleoDocumento2 páginasCuestionario 5 OleojoelAún no hay calificaciones
- Bomba CentrifugaDocumento12 páginasBomba CentrifugaVeronica MorenoAún no hay calificaciones
- Fallas y Proteccion de Los TransformadoresDocumento23 páginasFallas y Proteccion de Los TransformadoresEvanns P. Azarte100% (2)
- Tipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaDocumento5 páginasTipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaFernando ToscanoAún no hay calificaciones
- Fuentes conmutadas ATX: mediciones y componentesDocumento9 páginasFuentes conmutadas ATX: mediciones y componentesChristian Julian PeinadoAún no hay calificaciones
- Turbinas de GasDocumento12 páginasTurbinas de GasAldo LoaezaAún no hay calificaciones
- Capitulo 4 - Maquinas SincrónicasDocumento38 páginasCapitulo 4 - Maquinas Sincrónicassantiago arroyoAún no hay calificaciones
- Inversion de Giro de Un MotorDocumento14 páginasInversion de Giro de Un MotorAbel Apaza FuentesAún no hay calificaciones
- ACTUADORESDocumento4 páginasACTUADORESANDRES BARREIROAún no hay calificaciones
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 páginasAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroAún no hay calificaciones
- Actuadores: tipos, características y usosDocumento13 páginasActuadores: tipos, características y usosTrabajos EscolaresAún no hay calificaciones
- ActuadoresDocumento30 páginasActuadoresmanuel_avalos_21Aún no hay calificaciones
- Que Son Los Accionamientos ElectricosDocumento10 páginasQue Son Los Accionamientos ElectricosjailenAún no hay calificaciones
- Sesion11 Actuadores ControladoresDocumento11 páginasSesion11 Actuadores ControladoresFabian AlejandroAún no hay calificaciones
- ACTUADORESDocumento29 páginasACTUADORESAntonio CastroAún no hay calificaciones
- Instalacion SlackwareDocumento21 páginasInstalacion SlackwareAlfredo BenavidesAún no hay calificaciones
- Informe de Cambio de EspecificacionDocumento3 páginasInforme de Cambio de EspecificacionHuver R. Nuñez EdquenAún no hay calificaciones
- Excel For Masters. Macros y Aplicaciones VBADocumento9 páginasExcel For Masters. Macros y Aplicaciones VBADiana RicardiAún no hay calificaciones
- Superguia HTPC Con XBMC CompletaDocumento696 páginasSuperguia HTPC Con XBMC Completaraul_geekAún no hay calificaciones
- Guía 2°pp - Lineas de EsperaDocumento3 páginasGuía 2°pp - Lineas de EsperaJorge Sebastián Araya TapiaAún no hay calificaciones
- Logistica InternaDocumento11 páginasLogistica Internaosorio23100% (1)
- 395-6481 Sybase IQ PDFDocumento7 páginas395-6481 Sybase IQ PDFJavier AlviraAún no hay calificaciones
- RUC #20523859464 Factura Electrónica #F001-0000175: Inversiones Avipecuarias S.ADocumento1 páginaRUC #20523859464 Factura Electrónica #F001-0000175: Inversiones Avipecuarias S.ARonald GarciaAún no hay calificaciones
- Control de Encendido - Apagado de Un Motor DCDocumento35 páginasControl de Encendido - Apagado de Un Motor DCvioleta_jiménez_2Aún no hay calificaciones
- REINGENIERÍADocumento3 páginasREINGENIERÍAwilliam666Aún no hay calificaciones
- Señor Leame Antes de Hacer Cualquier Cosa!Documento2 páginasSeñor Leame Antes de Hacer Cualquier Cosa!Carlos Lara SueldoAún no hay calificaciones
- Ensayo de Analisis de Costos de Ciclo de VidaDocumento3 páginasEnsayo de Analisis de Costos de Ciclo de VidaJuan Carlos Zocko Olguin100% (1)
- Expresiones algebraicas 2o ESODocumento4 páginasExpresiones algebraicas 2o ESORodrigo Alonso Perez OrtuzarAún no hay calificaciones
- Cadenas de Markov Finitas IntroducciónDocumento29 páginasCadenas de Markov Finitas IntroducciónEliza H. AguilarAún no hay calificaciones
- Ejercicios 1 2013 ALGEBRA I Logica MatematicaDocumento8 páginasEjercicios 1 2013 ALGEBRA I Logica Matematicajose_5_50_99926336Aún no hay calificaciones
- Taller Ejercicios PseintDocumento3 páginasTaller Ejercicios PseintYESID AMID AYOLA PEÑAAún no hay calificaciones
- Cinco Fases de La Administración de ProyectosDocumento4 páginasCinco Fases de La Administración de ProyectosJoseAlbertoPugaSabidoAún no hay calificaciones
- Guia Inscripción Asalariados ExprésDocumento15 páginasGuia Inscripción Asalariados ExprésJUANJO GARCIAAún no hay calificaciones
- Algebra Lineal 1 GR 10Documento2 páginasAlgebra Lineal 1 GR 10Javier Hernando Ochoa ArteagaAún no hay calificaciones
- Tipos de EnlacesDocumento29 páginasTipos de EnlacesAbner Yue JuradoAún no hay calificaciones
- Practica 1 Arquitectura ComputadorasDocumento3 páginasPractica 1 Arquitectura Computadoraspatoeb69Aún no hay calificaciones
- Diferencia pseudocódigo y diagrama flujo algoritmosDocumento5 páginasDiferencia pseudocódigo y diagrama flujo algoritmoskeyomallAún no hay calificaciones
- La ObservaciónDocumento5 páginasLa ObservaciónJosimar Reyes Mosqueda100% (1)
- SAE Requisiciones de CompraDocumento12 páginasSAE Requisiciones de CompraYareli GómezAún no hay calificaciones
- Codificador Rotatorio - Wikipedia, La Enciclopedia LibreDocumento4 páginasCodificador Rotatorio - Wikipedia, La Enciclopedia LibreGary DiazAún no hay calificaciones