También podría gustarte
- Actividad Evaluativa Eje 2 Ecuaciones DiferencialesDocumento12 páginasActividad Evaluativa Eje 2 Ecuaciones Diferencialesluisa mayeny fernandez florez100% (1)
- Unidad 1 Teoría de ErroresDocumento42 páginasUnidad 1 Teoría de ErroresWellington ReyesAún no hay calificaciones
- 1.1 y 1.2Documento14 páginas1.1 y 1.2Zozi CruzAún no hay calificaciones
- Temario I. IntroducciónDocumento62 páginasTemario I. IntroducciónFrancisco Ramos BernalAún no hay calificaciones
- Modelos MatematicosDocumento14 páginasModelos MatematicosmonicaAún no hay calificaciones
- Analisis Numericos Ejercicios ResueltosDocumento10 páginasAnalisis Numericos Ejercicios ResueltosnardajtAún no hay calificaciones
- Métodos NuméricosDocumento217 páginasMétodos NuméricosAlfonso Guzman BeristainAún no hay calificaciones
- Análisis Numérico Tema 1Documento15 páginasAnálisis Numérico Tema 1Nicolás MéndezAún no hay calificaciones
- Comparto 'EJE 2 COLABORATIVO 2021 Areandina' Con UstedDocumento21 páginasComparto 'EJE 2 COLABORATIVO 2021 Areandina' Con UstedDayana SáenzAún no hay calificaciones
- Analísis de Error Unidad 1Documento10 páginasAnalísis de Error Unidad 1Ely GEAún no hay calificaciones
- Unidad1 PDFDocumento62 páginasUnidad1 PDFwilcalAún no hay calificaciones
- M. Especiales Unidad 1. 1. Intro-Errores. 2. Ecuaciones Univariable PDFDocumento45 páginasM. Especiales Unidad 1. 1. Intro-Errores. 2. Ecuaciones Univariable PDFSantiago Cardona ArroyaveAún no hay calificaciones
- Informe 8 de Laboratorio de Física MecanicaDocumento4 páginasInforme 8 de Laboratorio de Física Mecanicatatiana tamayoAún no hay calificaciones
- G# - JARAMILLO RUBIO - DIEGO - Deber2Documento30 páginasG# - JARAMILLO RUBIO - DIEGO - Deber2Felipe HuancAún no hay calificaciones
- Clase de Analisis Numerico 2015 - II (2788)Documento26 páginasClase de Analisis Numerico 2015 - II (2788)Lincol Herrera ParionaAún no hay calificaciones
- Compedio Unidad 4Documento14 páginasCompedio Unidad 4Santiago ValenciaAún no hay calificaciones
- Actividad Evaluativa Eje 2Documento17 páginasActividad Evaluativa Eje 2jose ferney galindo belloAún no hay calificaciones
- Informe N°2 - Semana 3Documento9 páginasInforme N°2 - Semana 3FATIMA ALESSANDRA BURGOS PLASENCIAAún no hay calificaciones
- Actividad 2Documento13 páginasActividad 2Santiago OrtegaAún no hay calificaciones
- MetNum. Cap1. Modelaje Matemático y Resolución de ProblemasDocumento11 páginasMetNum. Cap1. Modelaje Matemático y Resolución de ProblemasAlessandroAún no hay calificaciones
- Problemas 1-2 - Berrios - Flores - Kevin - EdwardDocumento8 páginasProblemas 1-2 - Berrios - Flores - Kevin - EdwardKevinEdwuardBerriosFloresAún no hay calificaciones
- Ecdif MECANICADocumento22 páginasEcdif MECANICAPrueba nada masAún no hay calificaciones
- CDDocumento17 páginasCDoscar david simon cruz0% (1)
- Matriz 4Documento15 páginasMatriz 4Juancho1Aún no hay calificaciones
- ANALISISDocumento58 páginasANALISISAbby AvendañoAún no hay calificaciones
- ProblemasAplicacion 1 2020-1Documento7 páginasProblemasAplicacion 1 2020-1Juan VillamilAún no hay calificaciones
- Ejercicios de ResorteDocumento5 páginasEjercicios de ResorteA.Aún no hay calificaciones
- Guia 2 - Uni 6Documento4 páginasGuia 2 - Uni 6Thomas Bustos OrtizAún no hay calificaciones
- Práctica 5 Obtención Experimental de La Frecuencia Natural de Un Sistema Masa ResorteDocumento6 páginasPráctica 5 Obtención Experimental de La Frecuencia Natural de Un Sistema Masa ResorteAlainIslasAún no hay calificaciones
- Práctica 2 Teoria Del ErrorDocumento2 páginasPráctica 2 Teoria Del Errorjulio sanchezAún no hay calificaciones
- Unidad 5 - FQDocumento6 páginasUnidad 5 - FQfrajavierpmAún no hay calificaciones
- Trabajo 01Documento11 páginasTrabajo 01EDER PERCY SANTIAGO CH�VEZAún no hay calificaciones
- Aplicaciones de Las Ecuaciones Diferenciales de Primer Orden en La QuímicaDocumento16 páginasAplicaciones de Las Ecuaciones Diferenciales de Primer Orden en La QuímicaNancy GuzmanAún no hay calificaciones
- 1.intro Metodos NumDocumento10 páginas1.intro Metodos NumEnmanuel Polanco MirandaAún no hay calificaciones
- Laboratorio4 Carga y DescargaDocumento14 páginasLaboratorio4 Carga y DescargaJesus Gallardo RamirezAún no hay calificaciones
- DesarrolloDocumento14 páginasDesarrolloGiovanny MicAún no hay calificaciones
- Modelo MatematicoDocumento10 páginasModelo MatematicoCarlos Eduardo Perdomo PalmaAún no hay calificaciones
- Articulo Caida LibreDocumento4 páginasArticulo Caida LibreDayanny Pinilla VargasAún no hay calificaciones
- Problemario Ec. Dif 1 y 2 OrdenDocumento22 páginasProblemario Ec. Dif 1 y 2 OrdenPablo Zven MtzAún no hay calificaciones
- Tarea 1 Fisica MecanicaDocumento16 páginasTarea 1 Fisica MecanicaFlorentina PerezAún no hay calificaciones
- Intro Metodos NumDocumento10 páginasIntro Metodos NumDalvin Castillo RamirezAún no hay calificaciones
- 1er. Parcial Fisica I-C8M-ResueltoDocumento14 páginas1er. Parcial Fisica I-C8M-ResueltoMissDlia HornaAún no hay calificaciones
- Presentacion ProyectoDocumento8 páginasPresentacion ProyectoAndrea SanchezAún no hay calificaciones
- Fisica - Laboratorio N°06 - Grupo 11Documento23 páginasFisica - Laboratorio N°06 - Grupo 11MARISOL NOELIA COLQUEPISCO JAVIERAún no hay calificaciones
- Emmanuel Gómez Preinforme 1Documento10 páginasEmmanuel Gómez Preinforme 1Gab BustamanteAún no hay calificaciones
- Experimentación Física PreliminarDocumento17 páginasExperimentación Física Preliminarwillinton llanosAún no hay calificaciones
- Problemario de Física MecánicaDocumento43 páginasProblemario de Física MecánicaPEDRO ANDRES PEREZAún no hay calificaciones
- Actividad1 FísicaDocumento13 páginasActividad1 FísicaAbraham SorianoAún no hay calificaciones
- Facultad de Ingeniería Mecánica - Practica - Riel - de - AireDocumento9 páginasFacultad de Ingeniería Mecánica - Practica - Riel - de - AireEsteban RodriguezAún no hay calificaciones
- Trabajo Individual Modulo I Automatización de Sistemas Industriales Patricio Diaz GDocumento10 páginasTrabajo Individual Modulo I Automatización de Sistemas Industriales Patricio Diaz GpdiazgodoyAún no hay calificaciones
- Actividad1 FísicaDocumento10 páginasActividad1 Físicaveronicaorrala0511Aún no hay calificaciones
- Actividad Evaluativa Eje 2 Ecuaciones DiferencialesDocumento11 páginasActividad Evaluativa Eje 2 Ecuaciones Diferencialesluisa mayeny fernandez florezAún no hay calificaciones
- Caracteristicas de Los Sistemas Representados Por Ecuaciones DiferencialesDocumento2 páginasCaracteristicas de Los Sistemas Representados Por Ecuaciones DiferencialespaulaAún no hay calificaciones
- EXPERIMENTO 2 Fuerza y Distancia Ahumada Beltrán Ramírez RevecoDocumento6 páginasEXPERIMENTO 2 Fuerza y Distancia Ahumada Beltrán Ramírez Revecoglenys YordanaAún no hay calificaciones
- Actividad1 FísicaDocumento13 páginasActividad1 FísicaMarianna YaredAún no hay calificaciones
- Actividad1 FísicaDocumento14 páginasActividad1 FísicaDaniel AriasAún no hay calificaciones
- Ecuaciones de Primer Orden-MitadespDocumento5 páginasEcuaciones de Primer Orden-MitadespRichard Icaro EsparzaAún no hay calificaciones
- Ingeniería química. Soluciones a los problemas del tomo IDe EverandIngeniería química. Soluciones a los problemas del tomo IAún no hay calificaciones
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- 3 Aplicaciones de Las Ecuaciones Diferenciales Calixto Daniel Aguilar GomezDocumento9 páginas3 Aplicaciones de Las Ecuaciones Diferenciales Calixto Daniel Aguilar GomezdanielAún no hay calificaciones
- Tarea Nº2 Ecuaciones Diferenciales de Primer Orden y Orden SuperiorDocumento2 páginasTarea Nº2 Ecuaciones Diferenciales de Primer Orden y Orden SuperiordanielAún no hay calificaciones
- TAREA Nº1 ECUACIONES DIFERENCIALES DE PRIMER ORDEN - PARTE 2 - I - 2024 - DocxDocumento2 páginasTAREA Nº1 ECUACIONES DIFERENCIALES DE PRIMER ORDEN - PARTE 2 - I - 2024 - DocxdanielAún no hay calificaciones
- 2 Unidad 2 Calixto Daniel Aguilar Gomez Ing Comercial - 11!03!22Documento51 páginas2 Unidad 2 Calixto Daniel Aguilar Gomez Ing Comercial - 11!03!22danielAún no hay calificaciones
- Examen Final de Contabilidad y Costos de TransporteDocumento1 páginaExamen Final de Contabilidad y Costos de TransportedanielAún no hay calificaciones
- De Forero, N. M. (1992) - Rol de La Enfermera en La Actualidad Deportiva Del Escolar. Avances en Enfermería, 10 (2), 53-62.Documento10 páginasDe Forero, N. M. (1992) - Rol de La Enfermera en La Actualidad Deportiva Del Escolar. Avances en Enfermería, 10 (2), 53-62.Al Yarimi MartinezAún no hay calificaciones
- Ralph Burns Materia y Energía Cap 1Documento41 páginasRalph Burns Materia y Energía Cap 1Angie Belen ErreisAún no hay calificaciones
- 2.1. Mapas CognitivosDocumento5 páginas2.1. Mapas CognitivosJose RendónAún no hay calificaciones
- Bases TeóricasDocumento3 páginasBases TeóricasPablo AcostaAún no hay calificaciones
- Analisis Foda Tecnm VS UtmDocumento3 páginasAnalisis Foda Tecnm VS UtmItza CamposAún no hay calificaciones
- Unidad 2 Clasificaciones de MantenimientoDocumento34 páginasUnidad 2 Clasificaciones de MantenimientoSanchez EZAún no hay calificaciones
- Manual de Procedimiento Tamizado en HCHDocumento7 páginasManual de Procedimiento Tamizado en HCHMiguel PérezAún no hay calificaciones
- Curso ADM 428 - Taller de Gestión SecretarialDocumento2 páginasCurso ADM 428 - Taller de Gestión SecretarialProcaseAún no hay calificaciones
- Cantidad de BarraDocumento19 páginasCantidad de BarraDanie SosoAún no hay calificaciones
- Revisoria Fiscal Actividad 3Documento10 páginasRevisoria Fiscal Actividad 3Lizeth Xiomara RAMIREZ CORREAAún no hay calificaciones
- Trabajo Definitivo de EspeciesDocumento17 páginasTrabajo Definitivo de EspeciesAndres Eduardo Escalona MonteroAún no hay calificaciones
- LumbociatalgiaDocumento2 páginasLumbociatalgiajhonx666xAún no hay calificaciones
- PCP Valor AgregadoDocumento23 páginasPCP Valor AgregadoMarco Poma JamancaAún no hay calificaciones
- APREA, A., GIORDANO, A., (2017) Manual de Endoscopía Veterinaria en Pequeños Animales. (REUN) Libros de CátedraDocumento72 páginasAPREA, A., GIORDANO, A., (2017) Manual de Endoscopía Veterinaria en Pequeños Animales. (REUN) Libros de CátedraAlejandra Cárdenas100% (1)
- Informe Violaciones DDHH en Euskadi Guerra Civil y Franquismo CAST (Azke...Documento34 páginasInforme Violaciones DDHH en Euskadi Guerra Civil y Franquismo CAST (Azke...GasteizBerri.comAún no hay calificaciones
- MSDS 784-32 CatalizadorDocumento5 páginasMSDS 784-32 CatalizadorStrikererAún no hay calificaciones
- Cadena de SuministroDocumento21 páginasCadena de SuministroVerónica EspinozaAún no hay calificaciones
- Ejercicios - Metodo SimplexDocumento63 páginasEjercicios - Metodo SimplexJohn Fernandao Salazar Pardo0% (1)
- Apuntes Informatuca UNAM Tercer SemestreDocumento228 páginasApuntes Informatuca UNAM Tercer SemestreSebastián López GonzagaAún no hay calificaciones
- AGOSTODocumento8 páginasAGOSTODiego Palomino LoaAún no hay calificaciones
- Friccion y RozamientoDocumento5 páginasFriccion y RozamientoLizandro Tapia MejiaAún no hay calificaciones
- Origen y Expansion de CristianismoDocumento12 páginasOrigen y Expansion de Cristianismosamyv1705Aún no hay calificaciones
- 5087 15847 1 PBDocumento15 páginas5087 15847 1 PBJimena Vega ChávezAún no hay calificaciones
- Aplicaciones en La SaludDocumento3 páginasAplicaciones en La SaludJhosue MundacaAún no hay calificaciones
- Modelos Lineales y Mejora Genetica AnimalDocumento64 páginasModelos Lineales y Mejora Genetica AnimalElmer Meza RojasAún no hay calificaciones
- Gestión de ProyectosDocumento5 páginasGestión de Proyectosviberxp100% (1)
- USC Gestion AmbientalDocumento16 páginasUSC Gestion AmbientalxGavo 69Aún no hay calificaciones
- 2do Parcial Epidemio - KELLY NOTASDocumento35 páginas2do Parcial Epidemio - KELLY NOTASBetzi HannlyAún no hay calificaciones
- Lab1105 4 I 2018Documento5 páginasLab1105 4 I 2018Deadpool FulgueraAún no hay calificaciones
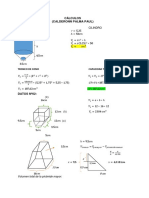
- CALCULOS de TolvaDocumento6 páginasCALCULOS de TolvapaulAún no hay calificaciones