También podría gustarte
- Dinámica de estructuras: Sistemas de un grado de libertadDe EverandDinámica de estructuras: Sistemas de un grado de libertadCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Ultrasonidos: Nivel IIDe EverandUltrasonidos: Nivel IICalificación: 5 de 5 estrellas5/5 (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- IAF MD5 Issue 4 Version 2 11112019Documento33 páginasIAF MD5 Issue 4 Version 2 11112019Nago ConsultoresAún no hay calificaciones
- Cuáles Son Las 5 C Del Trabajo en EquipoDocumento2 páginasCuáles Son Las 5 C Del Trabajo en EquipoAdrián Jofré ÁlvarezAún no hay calificaciones
- La Medicion y Analisis de Las Vibraciones Como TecnicaDocumento25 páginasLa Medicion y Analisis de Las Vibraciones Como TecnicaIvonne RicardoAún no hay calificaciones
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDe EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaAún no hay calificaciones
- ADN MILLIONARIOwwwDocumento113 páginasADN MILLIONARIOwwwalfredo rivasAún no hay calificaciones
- Resumen - Proyección de Elección Alternativa ProductivaDocumento3 páginasResumen - Proyección de Elección Alternativa ProductivaFabio Andres Enciso OrtizAún no hay calificaciones
- Curso de Sist. de Protec. de MaquinasDocumento86 páginasCurso de Sist. de Protec. de MaquinasmiguelAún no hay calificaciones
- Aplicacion de La Teoria de Las Vibraciones U4Documento40 páginasAplicacion de La Teoria de Las Vibraciones U4David BeltranAún no hay calificaciones
- Vibraciones MecanicasDocumento42 páginasVibraciones MecanicasAnonymous b84K3l00v100% (1)
- Vibraciones MecanicasDocumento8 páginasVibraciones MecanicasTaba Mendiola Jonathan DavidAún no hay calificaciones
- Guía metodológica para la evaluación de vibraciones en mano-brazoDe EverandGuía metodológica para la evaluación de vibraciones en mano-brazoAún no hay calificaciones
- AANÁLISIS DE VIBRACIONAL Y CORRIENTES INDUCIDAS BajoDocumento36 páginasAANÁLISIS DE VIBRACIONAL Y CORRIENTES INDUCIDAS BajoOscar Chambi QuispeAún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- Medición de Vibraciones Mecánicas y Técnicas de Corrección de Fallas MecánicasDocumento15 páginasMedición de Vibraciones Mecánicas y Técnicas de Corrección de Fallas MecánicasPedro0% (1)
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- Aplicación de La Teoría de Las VibracionesDocumento28 páginasAplicación de La Teoría de Las VibracionesNoe Beltran HernandezAún no hay calificaciones
- Equipos de Medicion de Vibraciones MecanicasDocumento25 páginasEquipos de Medicion de Vibraciones MecanicasDaniel VargasAún no hay calificaciones
- Acelerómetros y Puntos de Medición en Máquinas RotativasDocumento19 páginasAcelerómetros y Puntos de Medición en Máquinas RotativasJorge Alexander Prieto PabonAún no hay calificaciones
- Morgentahau PDFDocumento370 páginasMorgentahau PDFParis Rocha EscobarAún no hay calificaciones
- Analisis de Vibraciones Clase 9 Duoc UcDocumento14 páginasAnalisis de Vibraciones Clase 9 Duoc UccesarAún no hay calificaciones
- Vibraciones MecanicasDocumento19 páginasVibraciones Mecanicasjose davila100% (1)
- Diplomado para Docentes de Primaria. Módulo 3: Evaluación para El Aprendizaje en El Aula, Perspectiva de La Reforma 2009Documento88 páginasDiplomado para Docentes de Primaria. Módulo 3: Evaluación para El Aprendizaje en El Aula, Perspectiva de La Reforma 2009Radaid Pérez López100% (2)
- Aplicación de La Teoría de Las VibracionesDocumento15 páginasAplicación de La Teoría de Las VibracionesWalther Reza0% (1)
- Instrumentos para Medir Las VibracionesDocumento21 páginasInstrumentos para Medir Las VibracionesMarioAún no hay calificaciones
- Rasa U2 A3 CVV1Documento3 páginasRasa U2 A3 CVV1Javier Sánchez33% (3)
- Monitoreo de Condicion Por Vibraciones de Una PlantaDocumento26 páginasMonitoreo de Condicion Por Vibraciones de Una PlantaJuan Brandon Mamani ManriqueAún no hay calificaciones
- Curso de Vibraciones MecanicaiDocumento25 páginasCurso de Vibraciones MecanicaiRoberto UrielAún no hay calificaciones
- 417 1628354 Practica6Documento9 páginas417 1628354 Practica6eliot.puenteAún no hay calificaciones
- Medición de Vibración y Aplicaciones.Documento10 páginasMedición de Vibración y Aplicaciones.Cristian DawkinsAún no hay calificaciones
- AcelerografosDocumento15 páginasAcelerografosEddy RodriguezAún no hay calificaciones
- Tipos de Equipos de Mediciones MecanicasDocumento8 páginasTipos de Equipos de Mediciones MecanicasAlexis LavariegaAún no hay calificaciones
- Practica 8 VibracionesDocumento5 páginasPractica 8 VibracionesJuan Carlos SánchezAún no hay calificaciones
- 5.3 Medición e Interpretacion de La VibracionDocumento22 páginas5.3 Medición e Interpretacion de La VibracionEsteban GonzalezAún no hay calificaciones
- Vibraciones Mecanicas PDFDocumento16 páginasVibraciones Mecanicas PDFKeyter Javier CoelloAún no hay calificaciones
- Ii Presentacion - Monitoreo de VibracionesDocumento28 páginasIi Presentacion - Monitoreo de VibracionesCamiloGutierrezIllanesAún no hay calificaciones
- 5.1.1 Perfiles de Velocidad y Espesor de La Capa.Documento2 páginas5.1.1 Perfiles de Velocidad y Espesor de La Capa.victorAún no hay calificaciones
- Analisis de Vibraciones para El Mantenimiento PredictivoDocumento25 páginasAnalisis de Vibraciones para El Mantenimiento PredictivoPabloHuancaMendezAún no hay calificaciones
- Aplicacion de La Teoria de Las VibracionesDocumento13 páginasAplicacion de La Teoria de Las Vibracionescarlos ignacio loya sanchezAún no hay calificaciones
- Monografia Unidad 2Documento22 páginasMonografia Unidad 2Floricel Marquez VelazquezAún no hay calificaciones
- Actividad 3 HigieneDocumento8 páginasActividad 3 HigienePaula BuelvasAún no hay calificaciones
- Balanceo Dinámico de Sistemas RotantesDocumento5 páginasBalanceo Dinámico de Sistemas RotantesHanroldAún no hay calificaciones
- Cuestionario Preguntas 24 A La 30Documento5 páginasCuestionario Preguntas 24 A La 30Santiago VelascoAún no hay calificaciones
- Practica de AeroelasticidadDocumento6 páginasPractica de AeroelasticidadArturo Bravetti CortesAún no hay calificaciones
- Adquisición de Datos y Procesamiento de Señales (Acelerómetro)Documento0 páginasAdquisición de Datos y Procesamiento de Señales (Acelerómetro)Daniel MenesesAún no hay calificaciones
- Vibraciones MecanicasDocumento14 páginasVibraciones MecanicasluisrengAún no hay calificaciones
- Instrumentos SísmicosDocumento10 páginasInstrumentos SísmicosErick SolanoAún no hay calificaciones
- Diferencias Acelerometro de Carga e Iepe1Documento55 páginasDiferencias Acelerometro de Carga e Iepe1Wilson GarciaAún no hay calificaciones
- Modulo de VibracionesDocumento8 páginasModulo de VibracionesJfive AcmAún no hay calificaciones
- INTRODUCCIONDocumento4 páginasINTRODUCCIONARIANA FABIOLA SUAÑA/TITOAún no hay calificaciones
- Respuesta Del Sistema de Un Grado de Libertad (Aplicacion)Documento3 páginasRespuesta Del Sistema de Un Grado de Libertad (Aplicacion)Daniel CabreraAún no hay calificaciones
- Vibraciones MecanicasDocumento5 páginasVibraciones MecanicasEliezer BetancourtAún no hay calificaciones
- Mantenimiento PredictivoDocumento11 páginasMantenimiento PredictivoDiego FabricioAún no hay calificaciones
- Vibraciones MecanicasDocumento8 páginasVibraciones MecanicasJoseAún no hay calificaciones
- Vibraciones PresentacionDocumento25 páginasVibraciones PresentacionSamuelIvanBonillaGraciaAún no hay calificaciones
- Analisis de La VibracionDocumento15 páginasAnalisis de La VibracionJorge Villalobos JiménezAún no hay calificaciones
- Fuerzay Par ControlDocumento13 páginasFuerzay Par ControlAndrea Carolina DiazAún no hay calificaciones
- Actividad 2.1 Equipo de Medición, Sus Componentes y Datos A Recolectar.Documento11 páginasActividad 2.1 Equipo de Medición, Sus Componentes y Datos A Recolectar.Mantenimiento MendezAún no hay calificaciones
- Overol Bicolor FyrbanDocumento2 páginasOverol Bicolor FyrbanAdrián Jofré ÁlvarezAún no hay calificaciones
- Caneria Astm A 106 Astm A 106 Grado B Schedule 40 PDFDocumento1 páginaCaneria Astm A 106 Astm A 106 Grado B Schedule 40 PDFAdrián Jofré ÁlvarezAún no hay calificaciones
- Caneria Astm A 106 Astm A 106 Grado B Schedule 40 PDFDocumento1 páginaCaneria Astm A 106 Astm A 106 Grado B Schedule 40 PDFAdrián Jofré ÁlvarezAún no hay calificaciones
- Nueva GuiaDocumento293 páginasNueva GuiaAdrián Jofré ÁlvarezAún no hay calificaciones
- Tabla AceroDocumento1 páginaTabla AceroAdrián Jofré ÁlvarezAún no hay calificaciones
- Pre Informe Ensayos No DestructivosDocumento2 páginasPre Informe Ensayos No DestructivosAdrián Jofré ÁlvarezAún no hay calificaciones
- 1519416107.unidad 3 Clasificacion API y SAEDocumento3 páginas1519416107.unidad 3 Clasificacion API y SAEAdrián Jofré ÁlvarezAún no hay calificaciones
- SSTIDocumento12 páginasSSTIgochorneaAún no hay calificaciones
- Medios InstruccionalesDocumento3 páginasMedios InstruccionalesMarcos ZapataAún no hay calificaciones
- 02 Uce Pilar AylwinDocumento30 páginas02 Uce Pilar AylwinBerríos A. ClaudioAún no hay calificaciones
- Informe Microbiologia 1Documento2 páginasInforme Microbiologia 1ANA LUISA ORTEGA LOPEZAún no hay calificaciones
- Campo CantarellDocumento3 páginasCampo CantarellMichelleAún no hay calificaciones
- SECUENCIA DIDACTICA Naturales NoviembreDocumento8 páginasSECUENCIA DIDACTICA Naturales NoviembreMariaVictoriaChumbitaAún no hay calificaciones
- El Proyecto Arquitectónico, Planos y LevantamientoDocumento13 páginasEl Proyecto Arquitectónico, Planos y Levantamiento60739749Aún no hay calificaciones
- Resumen El Descontexto Del ArteDocumento2 páginasResumen El Descontexto Del ArteSilvia Diaz100% (1)
- Prevención en SaludDocumento4 páginasPrevención en SaludMilagros Daniela Gonzales SalazarAún no hay calificaciones
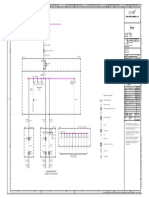
- A B C D E F G H: Diagrama UnifilarDocumento1 páginaA B C D E F G H: Diagrama UnifilarJUAN CAMILOAún no hay calificaciones
- Basidiomycetes y AscomycetesDocumento6 páginasBasidiomycetes y AscomycetesEzequiel GuardiaAún no hay calificaciones
- La Evaporacion TripticoDocumento2 páginasLa Evaporacion TripticoComando De Campaña Herminia JimenezAún no hay calificaciones
- Mapa EucariotaDocumento2 páginasMapa EucariotaMariafe ManriqueAún no hay calificaciones
- Manual Bomba NZ3085Documento6 páginasManual Bomba NZ3085juanfernandouribegAún no hay calificaciones
- Funes El MemoriosoDocumento7 páginasFunes El MemoriosoBelen CarolinaAún no hay calificaciones
- LenguajeDocumento1 páginaLenguajeMichel LópezAún no hay calificaciones
- Resumen Tema 2 Libro McGrawHillDocumento7 páginasResumen Tema 2 Libro McGrawHillspamdrl24Aún no hay calificaciones
- MUTACIONESDocumento5 páginasMUTACIONESPaty AmbrocioAún no hay calificaciones
- Guía MiércolesDocumento9 páginasGuía MiércolesCesar Latinny Fernandez RojasAún no hay calificaciones
- México Después de La IndependenciaDocumento4 páginasMéxico Después de La IndependenciaKevin ElvinAún no hay calificaciones
- Tecnicas de La InvestigacionDocumento13 páginasTecnicas de La InvestigacionMar BaVeAún no hay calificaciones
- CamouDocumento11 páginasCamouVerónicaWalkerAún no hay calificaciones
- Técnico en Informática 2023Documento1 páginaTécnico en Informática 2023Alfredo Matus IsradeAún no hay calificaciones
- Sagas Cosmicas de ThanosDocumento8 páginasSagas Cosmicas de ThanosClaudio LoyolaAún no hay calificaciones