También podría gustarte
- Texto Ver 2º Prim - 2023Documento58 páginasTexto Ver 2º Prim - 2023José Antoni Ledezma100% (1)
- Unidad 2 La Empresa - Emprendimiento de Un Taller (Atp)Documento10 páginasUnidad 2 La Empresa - Emprendimiento de Un Taller (Atp)José Antoni LedezmaAún no hay calificaciones
- JbohjDocumento19 páginasJbohjJosé Antoni LedezmaAún no hay calificaciones
- GobernadoresDocumento7 páginasGobernadoresJosé Antoni LedezmaAún no hay calificaciones
- Tipos de Sistemas de Encendido (ATP)Documento10 páginasTipos de Sistemas de Encendido (ATP)José Antoni LedezmaAún no hay calificaciones
- HVKGJBDocumento8 páginasHVKGJBJosé Antoni LedezmaAún no hay calificaciones
- Sin TítuloDocumento10 páginasSin TítuloJosé Antoni LedezmaAún no hay calificaciones
- Marketing y publicidad digital: conceptos, características y ventajasDocumento11 páginasMarketing y publicidad digital: conceptos, características y ventajasJosé Antoni LedezmaAún no hay calificaciones
- Asc Aac ADocumento9 páginasAsc Aac AJosé Antoni LedezmaAún no hay calificaciones
- JhvuhyghDocumento11 páginasJhvuhyghJosé Antoni LedezmaAún no hay calificaciones
- UigykhDocumento36 páginasUigykhJosé Antoni LedezmaAún no hay calificaciones
- PresentaciónDocumento22 páginasPresentaciónJosé Antoni LedezmaAún no hay calificaciones
- Deteccion de SurgenciasDocumento3 páginasDeteccion de SurgenciassibAún no hay calificaciones
- Equipo de SuperficieDocumento6 páginasEquipo de SuperficieNataly Peña RojasAún no hay calificaciones
- Mitsubishi Sport2Documento3 páginasMitsubishi Sport2José Antoni LedezmaAún no hay calificaciones
- GobernadoresDocumento7 páginasGobernadoresJosé Antoni LedezmaAún no hay calificaciones
- Ingles 1Documento2 páginasIngles 1José Antoni LedezmaAún no hay calificaciones
- FLUIDOSDocumento5 páginasFLUIDOSJosé Antoni LedezmaAún no hay calificaciones
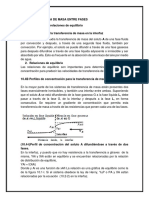
- Transferencia de masa entre fasesDocumento22 páginasTransferencia de masa entre fasesJosé Antoni LedezmaAún no hay calificaciones
- Transferencia de masa entre fasesDocumento22 páginasTransferencia de masa entre fasesJosé Antoni LedezmaAún no hay calificaciones
- Infecciones de Transmisión Sexual (ITS)Documento23 páginasInfecciones de Transmisión Sexual (ITS)José Antoni LedezmaAún no hay calificaciones
- Valores de Voltaje DieselDocumento1 páginaValores de Voltaje DieselJosé Antoni LedezmaAún no hay calificaciones
- Flujo de CajaDocumento1 páginaFlujo de CajaJosé Antoni LedezmaAún no hay calificaciones
- CorintiosDocumento397 páginasCorintiosDavid Alejandro Lozano GonzalezAún no hay calificaciones
- Destilación FraccionadaDocumento6 páginasDestilación FraccionadaJosé Antoni LedezmaAún no hay calificaciones
- HidroterminadoDocumento2 páginasHidroterminadoJosé Antoni LedezmaAún no hay calificaciones
- EM Detergentes Ropa PDFDocumento48 páginasEM Detergentes Ropa PDFMaria Fernanda Caballero RivasAún no hay calificaciones
- Flujo de CajaDocumento1 páginaFlujo de CajaJosé Antoni LedezmaAún no hay calificaciones
- Fluid OsDocumento5 páginasFluid OsJosé Antoni LedezmaAún no hay calificaciones
- Power PointDocumento16 páginasPower PointFranklin MateranoAún no hay calificaciones
- Check List de Edificios y PisosDocumento1 páginaCheck List de Edificios y PisosHector Valdivia TacoAún no hay calificaciones
- 4 IRNR-b-teledeteccion - I-4-2 PDFDocumento13 páginas4 IRNR-b-teledeteccion - I-4-2 PDFEleuterio Ponce PancaAún no hay calificaciones
- M-Ac-uev-002 - Manual de Usuario Plataforma de Apoyo A La Presencialidad-Módulo Estudiante - Rev CDocumento31 páginasM-Ac-uev-002 - Manual de Usuario Plataforma de Apoyo A La Presencialidad-Módulo Estudiante - Rev CSharon yivana Remolina becerraAún no hay calificaciones
- Hospitales InteligentesDocumento5 páginasHospitales InteligentesJairo AlvarezAún no hay calificaciones
- Plataforma de StreamingDocumento10 páginasPlataforma de StreamingAngie Bridget Ollero RiveraAún no hay calificaciones
- Pract Mtodos 7Documento26 páginasPract Mtodos 7alvaroAún no hay calificaciones
- MV7 User GuideDocumento27 páginasMV7 User Guideojojoojo lelelleleleAún no hay calificaciones
- Preparatorio 10Documento4 páginasPreparatorio 10Rogger CriolloAún no hay calificaciones
- Niveles y FlujosDocumento25 páginasNiveles y FlujosCEDRYAún no hay calificaciones
- DocentesDocumento36 páginasDocentesJuan MaciasAún no hay calificaciones
- Plan de Estudios Ingeniería IndustrialDocumento3 páginasPlan de Estudios Ingeniería IndustrialMiguel LópezAún no hay calificaciones
- Manual de Sony AspenDocumento80 páginasManual de Sony Aspenpekitapepa85Aún no hay calificaciones
- ONE - Procesos EstocásticosDocumento214 páginasONE - Procesos EstocásticosIván ReyesAún no hay calificaciones
- Total TrabajoDocumento15 páginasTotal TrabajoJosé Humberto Ramos MéndezAún no hay calificaciones
- 4° Unidades y Colegio en CasaDocumento22 páginas4° Unidades y Colegio en CasaMaria Angelica Moreno ChavezAún no hay calificaciones
- Contextualizar Fases Del Proyecto y Fases de La Gestión de ProyectosDocumento5 páginasContextualizar Fases Del Proyecto y Fases de La Gestión de ProyectosVALDESPINO CHAVARRIA JOSE ISAAC INGENIER�A EN SISTEMAS COMPUTACIONALESAún no hay calificaciones
- Manejo de Objetos de Autorizacion Modulo de MMDocumento41 páginasManejo de Objetos de Autorizacion Modulo de MMCampo PallaresAún no hay calificaciones
- 7 hábitos informáticos para mejorar tu productividad y seguridadDocumento2 páginas7 hábitos informáticos para mejorar tu productividad y seguridadLuis VielmanAún no hay calificaciones
- Kit de Bienvenida - Transformando La Educación Con IADocumento22 páginasKit de Bienvenida - Transformando La Educación Con IAuncampiAún no hay calificaciones
- MODELOS DE CONSTRUCCIÓN DE PROTOTIPOS - Estiveenson PDFDocumento22 páginasMODELOS DE CONSTRUCCIÓN DE PROTOTIPOS - Estiveenson PDFJimmy Antonio Herrera NeiraAún no hay calificaciones
- Rediseño de estaciones de trabajo en Agregados NacionalesDocumento14 páginasRediseño de estaciones de trabajo en Agregados NacionalesJuan GonzalezAún no hay calificaciones
- Guías de Prácticas de Instrumentación y Análisis 2021Documento39 páginasGuías de Prácticas de Instrumentación y Análisis 2021Carlos Sopán BenauteAún no hay calificaciones
- Guía rápida ZapiWinConsoleDocumento17 páginasGuía rápida ZapiWinConsoleLada LabusAún no hay calificaciones
- Unidad 1 - TPIDADocumento30 páginasUnidad 1 - TPIDADepartamento EEAún no hay calificaciones
- Provincia de AijaDocumento3 páginasProvincia de AijabellejeuneAún no hay calificaciones
- Plan de Desarrollo Urbano de Chachapoyas 2013-2021Documento22 páginasPlan de Desarrollo Urbano de Chachapoyas 2013-2021Marden Puerta Choctalin100% (1)
- 5° Sesión - Matematica - Sem 1-Exp 4-IvDocumento10 páginas5° Sesión - Matematica - Sem 1-Exp 4-IvAlbyan ConcepciónAún no hay calificaciones
- S1 - Tarea 1 Trabajo Individual de La SemanaDocumento7 páginasS1 - Tarea 1 Trabajo Individual de La SemanaCindy RoblesAún no hay calificaciones
- Actividad 5 - Modulo 5Documento2 páginasActividad 5 - Modulo 5karen tocaria80% (5)