También podría gustarte
- Objeto Social - Eventos SocialesDocumento2 páginasObjeto Social - Eventos SocialesDIAREN88% (33)
- Los Propietarios de Cuba 1958 - Jiménez Soler, GuillermoDocumento736 páginasLos Propietarios de Cuba 1958 - Jiménez Soler, GuillermoMario González Jr.Aún no hay calificaciones
- Derechos de AutorDocumento7 páginasDerechos de AutorMerle Joselin Marroquin CruzAún no hay calificaciones
- Preguntas KUKADocumento6 páginasPreguntas KUKAsantyAún no hay calificaciones
- Encoder ÓpticoDocumento17 páginasEncoder ÓpticoFredy Gustavo Cujia BolañoAún no hay calificaciones
- Manual Presion Constante (Variador)Documento9 páginasManual Presion Constante (Variador)flavio100% (2)
- Farmacogenómica y PsiquiatríaDocumento3 páginasFarmacogenómica y Psiquiatríajuan pabloAún no hay calificaciones
- Palacio de Los Condes de San Mateo de ValparaísoDocumento25 páginasPalacio de Los Condes de San Mateo de ValparaísoLuis Hernandez MercadoAún no hay calificaciones
- INTRODUCCION ROBOTICAxDocumento50 páginasINTRODUCCION ROBOTICAxArturo TapiaAún no hay calificaciones
- Robotica IndustrialDocumento97 páginasRobotica IndustrialFranklin Jara Moncayo100% (3)
- Robotica 1Documento18 páginasRobotica 1Miguel AriasAún no hay calificaciones
- Diplomado - ROBOTICA INDUSTRIAL PDFDocumento40 páginasDiplomado - ROBOTICA INDUSTRIAL PDFrimce77Aún no hay calificaciones
- Robots KUKA para Cargas Elevadas PDFDocumento36 páginasRobots KUKA para Cargas Elevadas PDFcristian garcia100% (1)
- Introduccion A La RoboticaDocumento101 páginasIntroduccion A La RoboticaSEBASTIAN HUMBERTO RIVAS CIFUENTES100% (1)
- Robot KukaDocumento4 páginasRobot KukaVeronica Andrade GarciaAún no hay calificaciones
- KR c2Documento59 páginasKR c2charleswcgAún no hay calificaciones
- Prog Robot KukaDocumento63 páginasProg Robot Kuka77fenix100% (2)
- Abb RobotDocumento24 páginasAbb RobotGuillermo Ramos TellezAún no hay calificaciones
- Morfología Del RobotDocumento18 páginasMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Manual Del Usuario IRC5Documento408 páginasManual Del Usuario IRC5JunanAún no hay calificaciones
- Curs Robot Studio LeonDocumento24 páginasCurs Robot Studio LeonJhon Charly0% (1)
- Morfologia Del Robot ManipuladorDocumento283 páginasMorfologia Del Robot ManipuladorJose Alfredo Rivera ChavezAún no hay calificaciones
- Practica Abb 140Documento5 páginasPractica Abb 140Sara Ruiz TajueloAún no hay calificaciones
- Manual de Usuario de Un Proceso en Un Robot FanucDocumento27 páginasManual de Usuario de Un Proceso en Un Robot FanucCaro Guerra100% (2)
- Introducción A Los Robots IndustrialesDocumento73 páginasIntroducción A Los Robots IndustrialesJose Antonio Mercado0% (1)
- Generación de TrayectoriasDocumento18 páginasGeneración de TrayectoriasErick CastilloAún no hay calificaciones
- Manual Operador RobotstudioDocumento638 páginasManual Operador RobotstudiotorkuaAún no hay calificaciones
- Medición o Configuración de La Base Del Robot KukaDocumento10 páginasMedición o Configuración de La Base Del Robot Kukacarlosandres12100% (2)
- Programacion de Robot MitsubishiDocumento9 páginasProgramacion de Robot MitsubishiPedro Glez R100% (1)
- Guia de Practica 9 - Robot KukaDocumento13 páginasGuia de Practica 9 - Robot KukaJavier RodriguezAún no hay calificaciones
- Caracerizacion de Robot FamucDocumento70 páginasCaracerizacion de Robot FamucJulia FernandezAún no hay calificaciones
- Manual IRB1600Documento420 páginasManual IRB1600AquilesAún no hay calificaciones
- Robótica y Programación KukaDocumento56 páginasRobótica y Programación KukaAitorAún no hay calificaciones
- RobotStudio PDFDocumento644 páginasRobotStudio PDFMiguel Angel Garcia FerroAún no hay calificaciones
- Curso de Programación RobotstudioDocumento1 páginaCurso de Programación RobotstudioAlejandra A GuevaraAún no hay calificaciones
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- Robot ScaraDocumento10 páginasRobot ScaraOmar R ReyesAún no hay calificaciones
- Iniciación KUKADocumento37 páginasIniciación KUKAMiquel100% (1)
- Programacion de RobotsDocumento43 páginasProgramacion de RobotsOMEGA LUL KAPPAAún no hay calificaciones
- Controladores Logicos ProgramablesDocumento8 páginasControladores Logicos ProgramablesJesus Ivan MaciasAún no hay calificaciones
- Guia 6Documento24 páginasGuia 6bookskskAún no hay calificaciones
- Robótics ProgrammingDocumento9 páginasRobótics ProgrammingGuillermo MoranAún no hay calificaciones
- Manual de Usuario KukaDocumento13 páginasManual de Usuario KukascribdotreblackAún no hay calificaciones
- Kuka KR C4Documento2 páginasKuka KR C4Santos Vásquez PumaAún no hay calificaciones
- Kuka MecanizadoDocumento17 páginasKuka MecanizadoAndres EspinosaAún no hay calificaciones
- Tema 2 - Morfología Del RobotDocumento44 páginasTema 2 - Morfología Del RobotDulce VelizAún no hay calificaciones
- Practica Robot ABBDocumento6 páginasPractica Robot ABBOSVALDO ROJAS0% (1)
- Practica 5Documento7 páginasPractica 5JanethAún no hay calificaciones
- Descripcion KCP (KUKA CONTROL PANEL)Documento11 páginasDescripcion KCP (KUKA CONTROL PANEL)Alex Moreano AAún no hay calificaciones
- PTT Metodo CascadaDocumento13 páginasPTT Metodo CascadaSANTIAGO DAMASO RODRIGUEZ MARTINEZAún no hay calificaciones
- Temporizadores On-Delay y Off-DelayDocumento7 páginasTemporizadores On-Delay y Off-DelayAngel López100% (1)
- Arduino JDDocumento73 páginasArduino JDCarlos Sosa100% (1)
- Guia de Practica 13 - Robot KukaDocumento8 páginasGuia de Practica 13 - Robot KukaJavier RodriguezAún no hay calificaciones
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- 01 - Movimiento Manual Del Robot Con El JoystickDocumento17 páginas01 - Movimiento Manual Del Robot Con El JoystickJose Antonio MercadoAún no hay calificaciones
- Modelo Matemático de Un Motor de Corriente ContinuaDocumento18 páginasModelo Matemático de Un Motor de Corriente ContinuaHenry D. LópezAún no hay calificaciones
- Practica Robótica Entradas y Salidas Robot KukaDocumento25 páginasPractica Robótica Entradas y Salidas Robot KukaHólguerMauropazAún no hay calificaciones
- Manual Programacion Robot MitsubishiDocumento100 páginasManual Programacion Robot MitsubishiJavier Navarro100% (1)
- Guia Lab DeviceNet V2Documento23 páginasGuia Lab DeviceNet V2Huguito CruzAún no hay calificaciones
- Método Cascada NeumáticaDocumento9 páginasMétodo Cascada NeumáticaVíctor CruzAún no hay calificaciones
- Modulo Allend Bradley - ManualDocumento43 páginasModulo Allend Bradley - ManualHans Yosed SHAún no hay calificaciones
- Robotica Industrial PDFDocumento26 páginasRobotica Industrial PDFgerson.cortez01Aún no hay calificaciones
- Robotica IndustrialDocumento26 páginasRobotica IndustrialGerardo LeonAún no hay calificaciones
- Robotica Parte 2Documento35 páginasRobotica Parte 2DanielAlamoAún no hay calificaciones
- Robotica Unidad 1 RecuperacionDocumento19 páginasRobotica Unidad 1 RecuperacionJorge Fabian GualteroAún no hay calificaciones
- Presentacion Cosimir Festo (Español)Documento87 páginasPresentacion Cosimir Festo (Español)Rafael Perez Meza100% (1)
- Interes Simple 2Documento15 páginasInteres Simple 2Elías TapiaAún no hay calificaciones
- GO 41376 Reglamento de La Ley de Aguas PDFDocumento10 páginasGO 41376 Reglamento de La Ley de Aguas PDFIng Jorge BellorinAún no hay calificaciones
- AntiderivadasDocumento4 páginasAntiderivadascdav927Aún no hay calificaciones
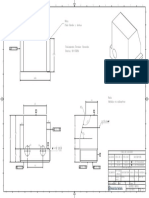
- Sub Ensamble 3 Matriz Movil PDFDocumento1 páginaSub Ensamble 3 Matriz Movil PDFELKIN MAURICIO GONZALEZ MONTOYAAún no hay calificaciones
- Sol Cap 1Documento6 páginasSol Cap 1Edgard Daniel Cornelio AimitumaAún no hay calificaciones
- D.s.n° 307-2017-EfDocumento3 páginasD.s.n° 307-2017-EfJuan Francisco Paco Acasiete50% (2)
- Módulo 3 Curso ITO 2018 OKDocumento53 páginasMódulo 3 Curso ITO 2018 OKRivas Estrada René50% (2)
- Gestion de Riesgos en Archivos - Laura SanchezDocumento53 páginasGestion de Riesgos en Archivos - Laura Sanchezelizabeleta100% (1)
- Bombeo ElectrosumergibleDocumento28 páginasBombeo ElectrosumergibleDiego OquendoAún no hay calificaciones
- Ley de Prenda Agraria o Industrial NicaraguaDocumento168 páginasLey de Prenda Agraria o Industrial NicaraguaJudith LopezAún no hay calificaciones
- Tif AmbientalDocumento20 páginasTif AmbientalJose Antonio HuacpeAún no hay calificaciones
- Jurisprudencia Vzla: Manuel Alfredo Rodriguez Abogado Maracaibo ZuliaDocumento24 páginasJurisprudencia Vzla: Manuel Alfredo Rodriguez Abogado Maracaibo ZuliaEan TapiaAún no hay calificaciones
- Expediente Tributario EjemploDocumento41 páginasExpediente Tributario EjemploRichard Manrique VillaAún no hay calificaciones
- UNIVERSIDAD NACIONAL DE CAJAMARCA ArticuloDocumento8 páginasUNIVERSIDAD NACIONAL DE CAJAMARCA ArticuloLuis AlejandroAún no hay calificaciones
- Tema Generador Cla CleDocumento4 páginasTema Generador Cla CleRemy Cuxeva100% (3)
- 1.1 Cortes y Ensambles. Figura RectaDocumento5 páginas1.1 Cortes y Ensambles. Figura RectaRAUL MOISES GARCIA RODRIGUEZAún no hay calificaciones
- Propiedades de Tuberías en La Industria Del PetróleoDocumento4 páginasPropiedades de Tuberías en La Industria Del PetróleoLiliana López CruzAún no hay calificaciones
- Polimeros Practica 2Documento8 páginasPolimeros Practica 2Eréndira RamírezAún no hay calificaciones
- Manual Indesit WIN 602 (Español - 72 Páginas)Documento1 páginaManual Indesit WIN 602 (Español - 72 Páginas)David LagunaAún no hay calificaciones
- 1.2.-CONCEPTOS Basicos de RedesDocumento26 páginas1.2.-CONCEPTOS Basicos de RedesReyna GutierrezAún no hay calificaciones
- Infografia Plaza (Distribución)Documento1 páginaInfografia Plaza (Distribución)Kristel Gómez100% (1)
- 6.POA-SEMENA Teorico1 PDFDocumento27 páginas6.POA-SEMENA Teorico1 PDFJose Fernando Roca ArceAún no hay calificaciones
- Bienes 12345Documento5 páginasBienes 12345Alexis tavarezAún no hay calificaciones
- PUC5120 - Caso 2 - The Wild FoodsDocumento7 páginasPUC5120 - Caso 2 - The Wild FoodsMaite FernandezAún no hay calificaciones