También podría gustarte
- Planificación de la gestión y organización de los procesos de montaje de sistemas domóticosDe EverandPlanificación de la gestión y organización de los procesos de montaje de sistemas domóticosCalificación: 4.5 de 5 estrellas4.5/5 (2)
- El Sistema Presupuestario.Documento13 páginasEl Sistema Presupuestario.Aleja Coneja BonifazAún no hay calificaciones
- Copia de Formato 03 IPERC Continuo ADocumento1 páginaCopia de Formato 03 IPERC Continuo AMarco Huaracallo MamaniAún no hay calificaciones
- Mapa Conceptual AuditoriaDocumento2 páginasMapa Conceptual AuditoriaMarcela Soto100% (1)
- Mapa Conceptual AuditoriaDocumento3 páginasMapa Conceptual AuditoriaDaniia FloresAún no hay calificaciones
- LAYOUTDocumento17 páginasLAYOUTJonathan CardenasAún no hay calificaciones
- 3 Mapa ConceptualDocumento5 páginas3 Mapa ConceptualRJ Varela CobaAún no hay calificaciones
- Cuadro ComparativoDocumento1 páginaCuadro ComparativoMarisol GALINDO TRIANAAún no hay calificaciones
- Mapa Conceptual AuditoriaDocumento2 páginasMapa Conceptual Auditoriaarnold wilfredoAún no hay calificaciones
- Procedimientos de Trabajo SegurosDocumento4 páginasProcedimientos de Trabajo SegurosMarcela Caicedo HernándezAún no hay calificaciones
- TPM Tríptico 2Documento1 páginaTPM Tríptico 2Fanny Bettina Lubo Lozada100% (2)
- SG - SST TarDocumento17 páginasSG - SST TarGustavo Uribe OquendoAún no hay calificaciones
- Romero Guzman Sergio Elí-Sistemas de ProducciónDocumento3 páginasRomero Guzman Sergio Elí-Sistemas de Producciónzeuserg8Aún no hay calificaciones
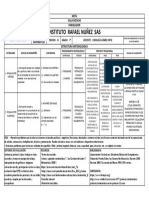
- Parcelador III Math 7 2019Documento1 páginaParcelador III Math 7 2019Consuelo Gomez OrtizAún no hay calificaciones
- Perifericos de Entrada y SalidaDocumento12 páginasPerifericos de Entrada y SalidaYesy MallmaAún no hay calificaciones
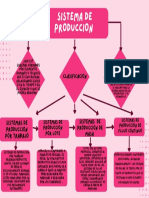
- Sistema de ProduccionDocumento1 páginaSistema de ProduccionGenny Beatriz PucAún no hay calificaciones
- Presentacion de CostosDocumento11 páginasPresentacion de Costosmarzelapopis6Aún no hay calificaciones
- Gestion de Procesos Trabajo GrupalDocumento1 páginaGestion de Procesos Trabajo GrupalJosue Juarez MelendezAún no hay calificaciones
- Diapositiva AnteproyectoDocumento10 páginasDiapositiva AnteproyectoYerson Fernando Acosta GuardianAún no hay calificaciones
- Blue and Pink Customer Support FlowchartDocumento1 páginaBlue and Pink Customer Support FlowchartmayerlyAún no hay calificaciones
- Sistema de Análisis DupontDocumento1 páginaSistema de Análisis DupontAdrián Alvarado CedeñoAún no hay calificaciones
- Formato Caracterizacion Todo Cajas CalidadDocumento4 páginasFormato Caracterizacion Todo Cajas CalidadSistema Gestion integradaAún no hay calificaciones
- Ley 1178 Safco 2012Documento16 páginasLey 1178 Safco 2012Juan Carlos Nova MarcaAún no hay calificaciones
- Pets-Ch-Mi-40. Colocado de Punto Topográfico V4Documento9 páginasPets-Ch-Mi-40. Colocado de Punto Topográfico V4Wilber ChancasanampaAún no hay calificaciones
- Ruta de Trabajo Proyecto LaboratorioDocumento1 páginaRuta de Trabajo Proyecto LaboratorioYuly GameroAún no hay calificaciones
- Ruta de Trabajo Proyecto LaboratorioDocumento1 páginaRuta de Trabajo Proyecto LaboratorioYuly GameroAún no hay calificaciones
- Mapa Conceptual AuditoriaDocumento2 páginasMapa Conceptual AuditoriaPaolita MinaAún no hay calificaciones
- 3.2 Licenciamiento de Almacenes de DistribuciónDocumento16 páginas3.2 Licenciamiento de Almacenes de DistribuciónEcuaciones DiferencialesAún no hay calificaciones
- Fases para La Implantación de Un Proceso de TrazabilidadDocumento5 páginasFases para La Implantación de Un Proceso de TrazabilidadDuberney Holguin JaramilloAún no hay calificaciones
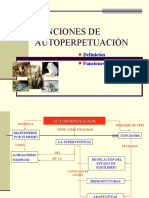
- Funciones de AutoperpetuaciónDocumento8 páginasFunciones de AutoperpetuaciónAnita Cruzado100% (1)
- Analisis de Modo Y Efecto de Las CausasDocumento32 páginasAnalisis de Modo Y Efecto de Las CausasKenny Ramos100% (1)
- Actividad 7 Flujogramas MarlyDocumento13 páginasActividad 7 Flujogramas MarlyDairy Chaparro VillamizarAún no hay calificaciones
- Brainstorming Esquema Doodle MulticolorDocumento1 páginaBrainstorming Esquema Doodle MulticolorMadelyn Johana FloresAún no hay calificaciones
- Administracion Financiera 2Documento4 páginasAdministracion Financiera 2maiky ninaAún no hay calificaciones
- Ing. Dr. Ángel Cárdenas GarcíaDocumento17 páginasIng. Dr. Ángel Cárdenas GarcíaJosé LennynAún no hay calificaciones
- Mapa Conceptual Administracion CientificaDocumento1 páginaMapa Conceptual Administracion CientificaJhonnatan RoncancioAún no hay calificaciones
- FT-SST-139 Formato de Gestión Del CambioDocumento1 páginaFT-SST-139 Formato de Gestión Del CambioJesrel Rivera Coord.SG-SSTAún no hay calificaciones
- Exposicion Sistemas Automatios de ControlDocumento10 páginasExposicion Sistemas Automatios de ControlFranklin OsorioAún no hay calificaciones
- Captacion Talento Humano Mapa MentalDocumento8 páginasCaptacion Talento Humano Mapa MentalFCOAún no hay calificaciones
- Formato 03 IPERC ContinuoDocumento2 páginasFormato 03 IPERC ContinuodannyAún no hay calificaciones
- SISTEMA DE COSTOS POR PROCESOS DiapositivasDocumento21 páginasSISTEMA DE COSTOS POR PROCESOS DiapositivasCristhian CoquendoAún no hay calificaciones
- Formato de Respuestas - Módulo 3 - Estación 4 RESPUESTASDocumento10 páginasFormato de Respuestas - Módulo 3 - Estación 4 RESPUESTASlissanaAún no hay calificaciones
- Formato #03 IPERC Continuo - VDocumento2 páginasFormato #03 IPERC Continuo - VAlvaro BelizarioAún no hay calificaciones
- Formato de Acciones Preventivas y CorrectivasDocumento4 páginasFormato de Acciones Preventivas y CorrectivasPaola Marcela Alvis BarreroAún no hay calificaciones
- Flujograma InventariosDocumento38 páginasFlujograma Inventariosblanca ines benitez piandaAún no hay calificaciones
- CARATULA FARMACO-fusionadoDocumento2 páginasCARATULA FARMACO-fusionadoSofia Carolina Parraga SabandoAún no hay calificaciones
- Plan Medidas de ControlDocumento8 páginasPlan Medidas de Controlcarlos oscar zuniga cruzAún no hay calificaciones
- Concepciones Del MundoDocumento12 páginasConcepciones Del Mundooliver roque reyesAún no hay calificaciones
- Tarea 2Documento3 páginasTarea 2EliabAún no hay calificaciones
- Iperc 1Documento1 páginaIperc 1LEYDYAún no hay calificaciones
- Instructivo - Trabajos en Plataforma, Orden y LimpiezaDocumento2 páginasInstructivo - Trabajos en Plataforma, Orden y Limpiezapunzeta_81Aún no hay calificaciones
- Formato IPERC .XLSX - Anterior - Caso IDocumento1 páginaFormato IPERC .XLSX - Anterior - Caso IAlejandra Gama PeraltillaAún no hay calificaciones
- Nivel CS AJRBDocumento1 páginaNivel CS AJRB21160320Aún no hay calificaciones
- 2023 PlanAccionAnual SeccionMedidasRemediacionDocumento14 páginas2023 PlanAccionAnual SeccionMedidasRemediacionrrhhmunihuancaraniAún no hay calificaciones
- SSL PR 02 in 01 RG 02 Preopera Riesgos Lista Chequeo TsaDocumento3 páginasSSL PR 02 in 01 RG 02 Preopera Riesgos Lista Chequeo TsaJairo ValeroAún no hay calificaciones
- Formato Análisis de Riesgos para La Ejecución de Un Trabajo Sistema de Gestión HSE Gerencia HSE HSE-F-160 Elaborado 28/06/2021Documento4 páginasFormato Análisis de Riesgos para La Ejecución de Un Trabajo Sistema de Gestión HSE Gerencia HSE HSE-F-160 Elaborado 28/06/2021Jaime AlmanzaAún no hay calificaciones
- FO SYM 40 Espacios ConfinadosDocumento1 páginaFO SYM 40 Espacios ConfinadosKlaudia AguilarAún no hay calificaciones
- Formato IPERC .XLSX - Anterior - Caso IIDocumento1 páginaFormato IPERC .XLSX - Anterior - Caso IIAlejandra Gama PeraltillaAún no hay calificaciones
- STFT17Documento6 páginasSTFT17hseq sarturAún no hay calificaciones
- Calidad OscarDocumento13 páginasCalidad OscarJessi MarianoAún no hay calificaciones
- Planificacion Anual de Matematica de 4 To 2023Documento13 páginasPlanificacion Anual de Matematica de 4 To 2023Briceño Perez GabrielaAún no hay calificaciones
- (Practica 1) - Problemas para Resolver-Acero EstructuralDocumento4 páginas(Practica 1) - Problemas para Resolver-Acero EstructuralJordin Jesus ChumaceroAún no hay calificaciones
- Exposicion Formacion en EnfermeriaDocumento18 páginasExposicion Formacion en EnfermeriaFrancisco Flores PachecoAún no hay calificaciones
- Marketing Contab.Documento81 páginasMarketing Contab.DANIEL RODRIGO QUISPE ORDONEZAún no hay calificaciones
- U1 - Antecedentes de La Auditoria AdministrativaDocumento5 páginasU1 - Antecedentes de La Auditoria AdministrativaADRIANA EVANGELINA DE LA CRUZ TORRESAún no hay calificaciones
- Cuerpo Lúteo Hemorrágico: Ginecología y ObstetriciaDocumento1 páginaCuerpo Lúteo Hemorrágico: Ginecología y Obstetriciamaria.lorena04.2013Aún no hay calificaciones
- Francisco Rodríguez AdradosDocumento4 páginasFrancisco Rodríguez AdradosRocioAún no hay calificaciones
- Ayuda Memoria Matrícula Digital 2023 - GeneralDocumento2 páginasAyuda Memoria Matrícula Digital 2023 - GeneralLeonardo YufraAún no hay calificaciones
- Higiene AnaliticaDocumento12 páginasHigiene AnaliticaBrisa CabanaAún no hay calificaciones
- Guia Redaccion Traduccion ComentadaDocumento20 páginasGuia Redaccion Traduccion Comentadaaldeanouer0% (1)
- Andragogia o Educación Del AdultoDocumento2 páginasAndragogia o Educación Del AdultoAntonella PronzatoAún no hay calificaciones
- Lopez Villasevil, ElenaDocumento48 páginasLopez Villasevil, ElenaEvelia HernándezAún no hay calificaciones
- Ideología Que Formaron A México Comoestado - NaciónDocumento1 páginaIdeología Que Formaron A México Comoestado - Naciónbrendadelcarmen2311Aún no hay calificaciones
- Los Actos Administrativos y Corrupción de Funcionarios A Nivel Del EstadoDocumento17 páginasLos Actos Administrativos y Corrupción de Funcionarios A Nivel Del EstadoAbraham muñoz rosalesAún no hay calificaciones
- Modulo de Matematicas 301Documento15 páginasModulo de Matematicas 301Roberto Carlos Orozco LuboAún no hay calificaciones
- Caso Clinico Implantología - EVELINE PEREZDocumento36 páginasCaso Clinico Implantología - EVELINE PEREZEveline K Perez GAún no hay calificaciones
- PDC Chungui Al 2018Documento84 páginasPDC Chungui Al 2018teito7100% (2)
- Equilibrio en El Comercio InternacionalDocumento4 páginasEquilibrio en El Comercio InternacionalSergio FloresAún no hay calificaciones
- Alergias RespiratoriasDocumento8 páginasAlergias RespiratoriasGabby Funes de Schaw100% (1)
- Tarjetas Bibliograficas Teoria TerminadoDocumento5 páginasTarjetas Bibliograficas Teoria TerminadoCarlosAún no hay calificaciones
- Stratix 800Documento83 páginasStratix 800norpool1@gmail.comAún no hay calificaciones
- POESÍASDocumento10 páginasPOESÍASMónicaLiraCruzAún no hay calificaciones
- Espacios Prehilbertianos 2020-10-06 PDFDocumento8 páginasEspacios Prehilbertianos 2020-10-06 PDFADRIANAún no hay calificaciones
- Practica 2 Rocío BonifacioDocumento7 páginasPractica 2 Rocío BonifacioSamanta OtapaAún no hay calificaciones
- Toyota Yaris 2005Documento4 páginasToyota Yaris 2005RafaelJimenezAún no hay calificaciones
- Confort Ruido, NTP 503, Preguntas - Grupo 3Documento23 páginasConfort Ruido, NTP 503, Preguntas - Grupo 3Carlos VincesAún no hay calificaciones
- Capitulo 05 - Fluidos - Odonto PDFDocumento48 páginasCapitulo 05 - Fluidos - Odonto PDFCristian DiazAún no hay calificaciones
- 4 Mitos y Falsas Creencias en Torno A La Violencia de Género PDFDocumento3 páginas4 Mitos y Falsas Creencias en Torno A La Violencia de Género PDFMaria del Carmen100% (1)
- Origen de La InvestigacionesDocumento6 páginasOrigen de La InvestigacionesALAN ANDRES ZAVALA LLANOSAún no hay calificaciones
- Uwiener Eq c3 Sem12 - CefadroxiloDocumento24 páginasUwiener Eq c3 Sem12 - CefadroxiloRosa Maria Torres CárdenasAún no hay calificaciones