También podría gustarte
- Tesina Cortocircuito PDFDocumento110 páginasTesina Cortocircuito PDFJose LuisAún no hay calificaciones
- GalvisEdwin 2021 BancoPruebasBombasDocumento56 páginasGalvisEdwin 2021 BancoPruebasBombasDavid RodríguezAún no hay calificaciones
- RodillosTuberiaCircular (Bueno)Documento54 páginasRodillosTuberiaCircular (Bueno)Andres MoragaAún no hay calificaciones
- ZapataMelissa 2023 HornoTratamientoTermicoDocumento87 páginasZapataMelissa 2023 HornoTratamientoTermicoOsmar CarrascoAún no hay calificaciones
- Documento de Invetigacion-1-10Documento10 páginasDocumento de Invetigacion-1-10Hillary Pilco DominguezAún no hay calificaciones
- EstradaMario 2021 DisenoEstribosPuentesDocumento87 páginasEstradaMario 2021 DisenoEstribosPuentesluis angel espitia lopezAún no hay calificaciones
- INFORME PASANTIA JHONNY PADILLA (Autoguardado)Documento135 páginasINFORME PASANTIA JHONNY PADILLA (Autoguardado)elcherataAún no hay calificaciones
- Proyecto de ResidenciaDocumento78 páginasProyecto de ResidenciaJose RiosAún no hay calificaciones
- Castañeda Agudelo Cristian Camilo 2017Documento98 páginasCastañeda Agudelo Cristian Camilo 2017CRISTIAN ANDRES SANABRIA MARTINEZAún no hay calificaciones
- Análisis de circuitos eléctricos Estado estableDe EverandAnálisis de circuitos eléctricos Estado estableCalificación: 5 de 5 estrellas5/5 (8)
- Código: 20451629700Documento112 páginasCódigo: 20451629700KellyAún no hay calificaciones
- Casos de estudio prácticos en termodinámica: Ejercicios para resolver mediante ASPEN HYSYS®De EverandCasos de estudio prácticos en termodinámica: Ejercicios para resolver mediante ASPEN HYSYS®Aún no hay calificaciones
- Diseño automatizado de modelos de simulación basados en autómatas celularesDe EverandDiseño automatizado de modelos de simulación basados en autómatas celularesAún no hay calificaciones
- DuqueAlejandro 2023 GuiasSubestaciónJouktaiDocumento68 páginasDuqueAlejandro 2023 GuiasSubestaciónJouktaiFrancisco AvilezAún no hay calificaciones
- Tesis M6 Dimel ContrerasDocumento201 páginasTesis M6 Dimel ContrerasArturo CMAún no hay calificaciones
- ANEXO 16 Normativa Guia TecnicaDocumento115 páginasANEXO 16 Normativa Guia TecnicaLuis M. AtayAún no hay calificaciones
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareDe EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareAún no hay calificaciones
- TFG Alejandro Jose Francisco Zea BenitezDocumento77 páginasTFG Alejandro Jose Francisco Zea BenitezAlvaro Armas JulcaAún no hay calificaciones
- TF - Sistemas Avanzados de ManufacturaDocumento54 páginasTF - Sistemas Avanzados de ManufacturaBruno Teran HornaAún no hay calificaciones
- Manual de Programacion HS2128-2016-2032-2064Documento26 páginasManual de Programacion HS2128-2016-2032-2064Rossemery Bellido Felices100% (1)
- MetodologÃ-a para Generaciã N de Trayectorias de Manipuladores Robã TicosDocumento203 páginasMetodologÃ-a para Generaciã N de Trayectorias de Manipuladores Robã TicosJulian David Arevalo GarciaAún no hay calificaciones
- Informe Grupo 2 PTAP PopayánDocumento67 páginasInforme Grupo 2 PTAP PopayánDiego Fernando Ruiz RomeroAún no hay calificaciones
- Tesis FinalDocumento101 páginasTesis FinalYordan ChavezAún no hay calificaciones
- PalaciosMonteroNicolDayhana2019 PDFDocumento82 páginasPalaciosMonteroNicolDayhana2019 PDFNaim PianettiAún no hay calificaciones
- Aprendizaje basado en proyectos aplicado en los primeros cursos de ingeniería mecánicaDe EverandAprendizaje basado en proyectos aplicado en los primeros cursos de ingeniería mecánicaAún no hay calificaciones
- Calibrador de Procesos PDFDocumento112 páginasCalibrador de Procesos PDFRicardoAún no hay calificaciones
- TesisDocumento121 páginasTesisVeronica Lopez100% (1)
- Microsoft C#. Lenguaje y Aplicaciones. 2ª Edición.De EverandMicrosoft C#. Lenguaje y Aplicaciones. 2ª Edición.Aún no hay calificaciones
- Lorente - Diseno Implementacion y Control de Un Prototipo de Robot SCARA de 4 Grados de LibertadDocumento139 páginasLorente - Diseno Implementacion y Control de Un Prototipo de Robot SCARA de 4 Grados de Libertadernmor2305Aún no hay calificaciones
- Ejemplo de CalculoDocumento128 páginasEjemplo de Calculollc3nd3rllAún no hay calificaciones
- Diseño e Implamentación de La Electrónica de Un Sistema de Sensado de Las Vibraciones de Una Estructura MetálicaDocumento60 páginasDiseño e Implamentación de La Electrónica de Un Sistema de Sensado de Las Vibraciones de Una Estructura MetálicaCuenta De RespaldoAún no hay calificaciones
- SuarezSantiago 2022 ServiciosSubestacionesElectricasDocumento79 páginasSuarezSantiago 2022 ServiciosSubestacionesElectricasPhillippe FoixAún no hay calificaciones
- Maquinas CNCDocumento37 páginasMaquinas CNCMarlon PrezaAún no hay calificaciones
- AlbertoMucarsel TrabajotesisDocumento162 páginasAlbertoMucarsel TrabajotesiskevinAún no hay calificaciones
- Proyecto de Grado 2021Documento153 páginasProyecto de Grado 2021Hernan SemperteguiAún no hay calificaciones
- TFG Mes DisDocumento96 páginasTFG Mes DisCaexvenAún no hay calificaciones
- Informe - Tesis - Bullon G - Rodriguez PDocumento66 páginasInforme - Tesis - Bullon G - Rodriguez PjuannAún no hay calificaciones
- León Nicolás 2019Documento112 páginasLeón Nicolás 2019Cristian SanchezAún no hay calificaciones
- Instituto Politécnico Nacional: "Maquina Fresadora de Control CNC Tipo Cartesiano para Materiales Plásticos y Madera"Documento104 páginasInstituto Politécnico Nacional: "Maquina Fresadora de Control CNC Tipo Cartesiano para Materiales Plásticos y Madera"Heide SolorzanoAún no hay calificaciones
- Manual de Diseños - CODENSADocumento150 páginasManual de Diseños - CODENSALuis Eduardo Alvarado LopezAún no hay calificaciones
- Integridad de Pozos, Análisis de Riesgo en La Presión Anormal Del Espacio AnularDocumento111 páginasIntegridad de Pozos, Análisis de Riesgo en La Presión Anormal Del Espacio AnularFernanda Medrano MirelesAún no hay calificaciones
- Análisis de datos experimentales en ingenieríaDe EverandAnálisis de datos experimentales en ingenieríaAún no hay calificaciones
- Escuela Politécnica de Ingeniería de Gijón: Máster Universitario en Ingeniería Industrial MinginduDocumento110 páginasEscuela Politécnica de Ingeniería de Gijón: Máster Universitario en Ingeniería Industrial MinginduAlan PortocarreroAún no hay calificaciones
- Rojas Tapara Joaquin PDFDocumento132 páginasRojas Tapara Joaquin PDFHenry Ulises Guevara EscribaAún no hay calificaciones
- Diseno Sistema Gestion Calidad Mantenimiento Electrico EdelcaDocumento100 páginasDiseno Sistema Gestion Calidad Mantenimiento Electrico EdelcaVicky BuitrónAún no hay calificaciones
- Propuesta Técnica de Control en Un Invernadero Industrial Tipo Multitúnel y Monitoreo de VariableDocumento285 páginasPropuesta Técnica de Control en Un Invernadero Industrial Tipo Multitúnel y Monitoreo de Variablenicol fernanda quispe torresAún no hay calificaciones
- Trabajo Final Certificacion Iec 60364 PDFDocumento60 páginasTrabajo Final Certificacion Iec 60364 PDFWilmar Angulo RiveraAún no hay calificaciones
- Procesos de fabricación en metalesDe EverandProcesos de fabricación en metalesCalificación: 5 de 5 estrellas5/5 (2)
- TESIS Control de Una Plataforma MóvilDocumento201 páginasTESIS Control de Una Plataforma MóvilDaniel FalcoffAún no hay calificaciones
- Tfm-Teresa-Latorre - Diseño Protesis Memoria Tlp2Documento154 páginasTfm-Teresa-Latorre - Diseño Protesis Memoria Tlp2agustinAún no hay calificaciones
- Informe Final Grupo 2Documento57 páginasInforme Final Grupo 2Frank Muñoz CanoAún no hay calificaciones
- KNX. Domótica e Inmótica: Guía Práctica para el instaladorDe EverandKNX. Domótica e Inmótica: Guía Práctica para el instaladorCalificación: 5 de 5 estrellas5/5 (1)
- Metodología para diagnosticar la habitabilidad en la vivienda social: Higrotermicidad-iluminación-acústicaDe EverandMetodología para diagnosticar la habitabilidad en la vivienda social: Higrotermicidad-iluminación-acústicaAún no hay calificaciones
- TFG Juan Miguel Huertas Burgos PDFDocumento195 páginasTFG Juan Miguel Huertas Burgos PDFAndres SoriaAún no hay calificaciones
- Desarrollo e Implementación de Un Sistema de Tracción y Dirección en Prototipo de Robot DesmalezadorDocumento165 páginasDesarrollo e Implementación de Un Sistema de Tracción y Dirección en Prototipo de Robot DesmalezadorOmar ChavezAún no hay calificaciones
- Exo ManoDocumento199 páginasExo ManoNiko Trespalacios GAún no hay calificaciones
- Controldelmov PDFDocumento151 páginasControldelmov PDFMizael GamboaAún no hay calificaciones
- Camara Frigorifica Tesis - UnlockedDocumento111 páginasCamara Frigorifica Tesis - UnlockedCristian LazoAún no hay calificaciones
- Ortega Carrillo Wilson AlexanderDocumento112 páginasOrtega Carrillo Wilson AlexanderOmar Enrique ContrerasAún no hay calificaciones
- Power Point Teoria General Del Proceso Capitulo 1Documento16 páginasPower Point Teoria General Del Proceso Capitulo 1jizasaAún no hay calificaciones
- Centenario de La CPEUM 29feb2016Documento24 páginasCentenario de La CPEUM 29feb2016erikAún no hay calificaciones
- PODERES DE LA UNION Cuadro CompletoDocumento1 páginaPODERES DE LA UNION Cuadro CompletoDaniel RojasAún no hay calificaciones
- Bando Municipal 2023Documento41 páginasBando Municipal 2023Daniel RojasAún no hay calificaciones
- Pauta de Mantencion Jetour X70 MT 10.000kmDocumento1 páginaPauta de Mantencion Jetour X70 MT 10.000kmLuis EnriqueAún no hay calificaciones
- Primer ConteoDocumento66 páginasPrimer ConteoPuente Calderon YensAún no hay calificaciones
- AST Retiro de TolvasDocumento2 páginasAST Retiro de TolvasMaria RetamalesAún no hay calificaciones
- 450AJ ArticuladaDocumento2 páginas450AJ ArticuladaLuis DaviddAún no hay calificaciones
- Manual Gol 2022Documento292 páginasManual Gol 2022Diego12001Aún no hay calificaciones
- SAM-ING-PR-004-Procedimiento de Trabajo en Altura Rev - 1Documento20 páginasSAM-ING-PR-004-Procedimiento de Trabajo en Altura Rev - 1Sergio BahamondesAún no hay calificaciones
- Cargador de LlantasDocumento77 páginasCargador de LlantasAlb MoralesAún no hay calificaciones
- FT-SI-05 Inspeccion Del Carro ElevadorDocumento1 páginaFT-SI-05 Inspeccion Del Carro Elevadorjose davidAún no hay calificaciones
- Alarme VolkswagenDocumento3 páginasAlarme VolkswagenbarbosaAún no hay calificaciones
- Especificacionestecnicas t680Documento2 páginasEspecificacionestecnicas t680Ulises Ivan Noyola Soto100% (2)
- Sensores AutomotricesDocumento38 páginasSensores AutomotricesRonny FarinangoAún no hay calificaciones
- Ford Ranger RaptorDocumento8 páginasFord Ranger RaptorchaparroperaltaAún no hay calificaciones
- Fpe Ranger Manual Propietario 2022Documento441 páginasFpe Ranger Manual Propietario 2022María fernanda Lazo BelónAún no hay calificaciones
- Reemplazo de Inserto de MixerDocumento6 páginasReemplazo de Inserto de MixerAldair GarciaAún no hay calificaciones
- Informe Banda Accesorios Templador Amarok MinAmbDocumento4 páginasInforme Banda Accesorios Templador Amarok MinAmbLuis Paladines BravoAún no hay calificaciones
- Agrale Ma 15.0 Mec-MecDocumento2 páginasAgrale Ma 15.0 Mec-MecJesus MartinezAún no hay calificaciones
- Apriete Bomba AceiteDocumento5 páginasApriete Bomba AceiteenverAún no hay calificaciones
- Compraventa de Vehiculos Seminuevos Y Derivados: ConceptosDocumento1 páginaCompraventa de Vehiculos Seminuevos Y Derivados: ConceptosChristian SaenzAún no hay calificaciones
- Xre 300 Abs (2023) D2203-Man-1309Documento226 páginasXre 300 Abs (2023) D2203-Man-1309juangilermAún no hay calificaciones
- AF - Dercomaq - Ficha - Tecnica - A4 - 6x2 (1) - CompressedDocumento2 páginasAF - Dercomaq - Ficha - Tecnica - A4 - 6x2 (1) - CompressedJose Eduardo Garcia SalasAún no hay calificaciones
- Esquema de Luces Opel CorsaDocumento5 páginasEsquema de Luces Opel CorsaCamilo Alejandro García EspinosaAún no hay calificaciones
- Cambio Sincronizador EatonDocumento16 páginasCambio Sincronizador EatonMauricio Galvez Menendez80% (5)
- T5 CTVDocumento9 páginasT5 CTVJefferson ChipantizaAún no hay calificaciones
- BITM0233-00 Regulación de Strip Wears Del Círculo y Hoja - 24HMDocumento7 páginasBITM0233-00 Regulación de Strip Wears Del Círculo y Hoja - 24HMPercy Herrera ZeballosAún no hay calificaciones
- Versa Manual 12 PDFDocumento1 páginaVersa Manual 12 PDFJarehAún no hay calificaciones
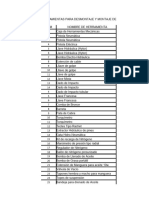
- Herramientas para Desmontaje y Montaje de Suspensión DelanteraDocumento4 páginasHerramientas para Desmontaje y Montaje de Suspensión Delanterarobing8m8cueva8obispAún no hay calificaciones
- Reporte de TelemetriaDocumento7 páginasReporte de TelemetriaMateo Camilo AstudilloAún no hay calificaciones
- Check Los VolqueteDocumento2 páginasCheck Los Volqueteyithian riveraAún no hay calificaciones
- Autos Camiones de Chihuahua S.A. de C.V.Documento2 páginasAutos Camiones de Chihuahua S.A. de C.V.Omar CarrilloAún no hay calificaciones
- Thunder CatalogoDocumento5 páginasThunder Catalogoappsheetspc PanamaAún no hay calificaciones