También podría gustarte
- Evolucion de La CarreteraDocumento1 páginaEvolucion de La CarreteraAlexis Rafael Asipali Cohelo100% (3)
- Formulario FísicaDocumento2 páginasFormulario FísicaAlan Jesus Sanchez PerezAún no hay calificaciones
- UBA E1 15 F Compuesta 2020Documento5 páginasUBA E1 15 F Compuesta 2020Yessica OliveroAún no hay calificaciones
- Formulario Referencial MEC-258Documento13 páginasFormulario Referencial MEC-258Daniel Esteban Hormazábal LópezAún no hay calificaciones
- Flexion CompuestaDocumento6 páginasFlexion Compuestamar q.Aún no hay calificaciones
- Formulario-Mecanica de MaterialesDocumento13 páginasFormulario-Mecanica de MaterialesSamuel RuelasAún no hay calificaciones
- Problemas de Dinámica ResueltosDocumento6 páginasProblemas de Dinámica ResueltosJeanAún no hay calificaciones
- Formulario Engranes RectosDocumento13 páginasFormulario Engranes RectosDanielAún no hay calificaciones
- Formulario - Física 1Documento3 páginasFormulario - Física 1Rodrigo RamónAún no hay calificaciones
- Ejercicio Teorema de La Conservación de La Energía Mecánica y Sus AplicacionesDocumento4 páginasEjercicio Teorema de La Conservación de La Energía Mecánica y Sus AplicacionesDanilo VergaraAún no hay calificaciones
- Ecuaciones Factor FriccionDocumento2 páginasEcuaciones Factor FriccionManuel JesúsAún no hay calificaciones
- Fórmulas Física I (Fuerza, Energía y Potencia) AaaaaaaDocumento2 páginasFórmulas Física I (Fuerza, Energía y Potencia) AaaaaaaMoon PieAún no hay calificaciones
- FORMULARIO CinemáticaDocumento2 páginasFORMULARIO CinemáticaSilvia Carreón MirandaAún no hay calificaciones
- Formulario Fisica AppolDocumento1 páginaFormulario Fisica AppolMartin Oswaldo Dominguez RiveraAún no hay calificaciones
- FormulasDocumento1 páginaFormulasNatalia CastilloAdroverAún no hay calificaciones
- Campo Eléctrico de Una Distribucion Continua de CargaDocumento2 páginasCampo Eléctrico de Una Distribucion Continua de CargaRoger S. Sutta MamaniAún no hay calificaciones
- Trabajo Práctico 2 Termodinamica Ibarrola TobiasDocumento4 páginasTrabajo Práctico 2 Termodinamica Ibarrola TobiasTobi IbarrolaAún no hay calificaciones
- S4 Física - Resolución DirigidasDocumento19 páginasS4 Física - Resolución DirigidascargaelectricanegativaAún no hay calificaciones
- Formulario Fisica IsaccDocumento1 páginaFormulario Fisica Isaccanthoni cajamarcaAún no hay calificaciones
- DEBER-3 y 4Documento4 páginasDEBER-3 y 4Ricardo Armijos CabreraAún no hay calificaciones
- Formulario de Física - DinámicaDocumento1 páginaFormulario de Física - DinámicaYussell MontalvoAún no hay calificaciones
- Zona 1Documento1 páginaZona 1David HernándezAún no hay calificaciones
- Formulario FísicaDocumento3 páginasFormulario FísicaMichael EstradaAún no hay calificaciones
- Formula RioDocumento4 páginasFormula RioVinct Maco PeniAún no hay calificaciones
- 11 ExcentricidadesDocumento40 páginas11 ExcentricidadesLEIDY VIVIANA GUTIERREZ GALINDOAún no hay calificaciones
- Formulario 02 Atomo 2 BachDocumento1 páginaFormulario 02 Atomo 2 BachNuclearcakeAún no hay calificaciones
- Electro-Tarea N1.6-Ecuación de Nerst-Kdrb-196479Documento3 páginasElectro-Tarea N1.6-Ecuación de Nerst-Kdrb-196479Daniela RodriguezAún no hay calificaciones
- Formulario de FisicaDocumento1 páginaFormulario de FisicaEnrique Guzman100% (1)
- FinalDocumento63 páginasFinalALEX CILIOAún no hay calificaciones
- Formulario Tema 3Documento4 páginasFormulario Tema 3dsfdssdddAún no hay calificaciones
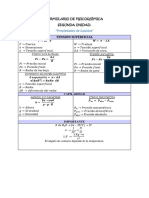
- Fisicoquimica - Formulario 2Documento8 páginasFisicoquimica - Formulario 2LeslieAsipuelaAún no hay calificaciones
- Formulario de Hidráulica de Máquinas y TransitorioDocumento1 páginaFormulario de Hidráulica de Máquinas y TransitorioAngel CarrascoAún no hay calificaciones
- Formulario Física Ii 2023BDocumento1 páginaFormulario Física Ii 2023Brosasnicole2006Aún no hay calificaciones
- Formulario Examen Final 2020-2021Documento4 páginasFormulario Examen Final 2020-2021FranAún no hay calificaciones
- Engranajes Rectos PDFDocumento2 páginasEngranajes Rectos PDFMiltonAún no hay calificaciones
- P1 BMEC12020 FinalfDocumento4 páginasP1 BMEC12020 FinalfVilma LopezAún no hay calificaciones
- 5-Dinamica Del Cuerpo RigidoDocumento4 páginas5-Dinamica Del Cuerpo Rigidonicolas acostaAún no hay calificaciones
- Diapositiva de Laboratorio 5 de Física IDocumento13 páginasDiapositiva de Laboratorio 5 de Física IJefferson Quispe PaicoAún no hay calificaciones
- TAREA Conservacion de La EnergiaDocumento2 páginasTAREA Conservacion de La EnergiaCarol Daniela Mamani RamosAún no hay calificaciones
- Solución Practico N°7Documento17 páginasSolución Practico N°7Cristóbal Vásquez QuezadaAún no hay calificaciones
- Lab 07 - Conservacion de MomentoDocumento5 páginasLab 07 - Conservacion de MomentoCristhianAún no hay calificaciones
- Cap ESTABILIDAD DE VOLTAJEDocumento12 páginasCap ESTABILIDAD DE VOLTAJEPac ManAún no hay calificaciones
- Formualrio Fallas Por Fatiga Debido A Cargas Variables 2021Documento13 páginasFormualrio Fallas Por Fatiga Debido A Cargas Variables 2021Huascar Ezequiel Lima TiconaAún no hay calificaciones
- Tema2-Prob11 SOLUCIÓN MUELLE FORZADODocumento5 páginasTema2-Prob11 SOLUCIÓN MUELLE FORZADOadria.pascual.iAún no hay calificaciones
- Envio3 2020 2Documento4 páginasEnvio3 2020 2Daniel OrellanaAún no hay calificaciones
- Formulario Universo y Sus CamposDocumento5 páginasFormulario Universo y Sus CamposRodrigo sanchez burgosAún no hay calificaciones
- 8043042-Gulag-Free 2Documento2 páginas8043042-Gulag-Free 2inmaariza6Aún no hay calificaciones
- Cuaderno de MatricialDocumento75 páginasCuaderno de Matricialboris galoAún no hay calificaciones
- RepasoDocumento9 páginasRepasoCarlos A. PinzónAún no hay calificaciones
- Fuerza Magnetica Que Actua Sobre Un Conductor Qu Transporta CorrienteDocumento11 páginasFuerza Magnetica Que Actua Sobre Un Conductor Qu Transporta CorrienteHelena Romero100% (1)
- Diapositiva de Laboratorio 5 de Física IDocumento13 páginasDiapositiva de Laboratorio 5 de Física IDārlēnē MüllerAún no hay calificaciones
- Tema 4 Segunda Ley de La TermodinámicaDocumento18 páginasTema 4 Segunda Ley de La Termodinámicanes.gonzlsAún no hay calificaciones
- Envio 3Documento4 páginasEnvio 3KIESER DE LA PEÑA GASPARAún no hay calificaciones
- Otto CycleDocumento17 páginasOtto CycleJohan Steven Briceño PulidoAún no hay calificaciones
- Formulario Fisica 295590 Downloable 1854689Documento3 páginasFormulario Fisica 295590 Downloable 1854689Kaori Karime GUutierrez ValdesAún no hay calificaciones
- Pieza 2A - DI - FADUDocumento3 páginasPieza 2A - DI - FADUGenesis VigoAún no hay calificaciones
- Tecnologia de Materiales PresentacionDocumento137 páginasTecnologia de Materiales PresentacionGenesis VigoAún no hay calificaciones
- TP4B y 4C - Fisica - DI - FADUDocumento2 páginasTP4B y 4C - Fisica - DI - FADUGenesis VigoAún no hay calificaciones
- TP1C-G12 - Di - FaduDocumento8 páginasTP1C-G12 - Di - FaduGenesis VigoAún no hay calificaciones
- TP1B - Fisica - Diseño IndustrialDocumento3 páginasTP1B - Fisica - Diseño IndustrialGenesis VigoAún no hay calificaciones
- Asociación Argentina de Perinatología (ASAPER)Documento3 páginasAsociación Argentina de Perinatología (ASAPER)Genesis VigoAún no hay calificaciones
- Ministerio de SaludDocumento15 páginasMinisterio de SaludGenesis VigoAún no hay calificaciones
- Fase 5Documento10 páginasFase 5Leonardo MorenoAún no hay calificaciones
- Jacinto FJDocumento191 páginasJacinto FJAlci-des Huacho OsorioAún no hay calificaciones
- Catálogo 2015 - INDALCO 2016Documento9 páginasCatálogo 2015 - INDALCO 2016Richard Antonio QuitianAún no hay calificaciones
- Encuesta Interes Programa A EstudiarDocumento4 páginasEncuesta Interes Programa A EstudiarDIEGO ORTEGONAún no hay calificaciones
- Contador Compuertas LogicasDocumento3 páginasContador Compuertas LogicasFer SegundoAún no hay calificaciones
- MSA SCBA ComponentsDocumento16 páginasMSA SCBA Componentsluis LopezAún no hay calificaciones
- Tesis II - AvanceDocumento94 páginasTesis II - AvanceDiegomego01Aún no hay calificaciones
- Linea de Productos y Servicios - Clientes - MilpoDocumento8 páginasLinea de Productos y Servicios - Clientes - MilpoRoger EnriqueAún no hay calificaciones
- Tabla de ProtocolosDocumento3 páginasTabla de ProtocolosItzayana Niiño0% (2)
- CartografiaDocumento22 páginasCartografiaHenry Santiago FloresAún no hay calificaciones
- Programa Resistencia de Materiales 1 2019Documento5 páginasPrograma Resistencia de Materiales 1 2019Mishel LópezAún no hay calificaciones
- 03 - Inventario Vial Pav Calles SisaDocumento4 páginas03 - Inventario Vial Pav Calles SisaRafael Tello SandovalAún no hay calificaciones
- 4 - Liquidación de ConductorDocumento2 páginas4 - Liquidación de ConductorCHRISTIAN CHICAAún no hay calificaciones
- Memoria Descriptiva de Arquitectura......Documento4 páginasMemoria Descriptiva de Arquitectura......juan mendozaAún no hay calificaciones
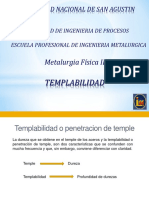
- Templabilidad II RegistroDocumento38 páginasTemplabilidad II RegistroLuis TorresAún no hay calificaciones
- Adminitracion de Proyectos Semana 4Documento3 páginasAdminitracion de Proyectos Semana 4Diego Benitez CarrascoAún no hay calificaciones
- Cuadro Sinoptico Fundamentos Sobre Quimica Ambiental El AguaDocumento8 páginasCuadro Sinoptico Fundamentos Sobre Quimica Ambiental El AguaSantiago Magaña Escobedo100% (1)
- Hidrologia Qda. AminioDocumento24 páginasHidrologia Qda. AminioBenjamin Lopez CahuazaAún no hay calificaciones
- DistribuciónDocumento6 páginasDistribuciónEdwin ChavezAún no hay calificaciones
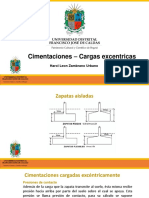
- Zapatas AisladasDocumento11 páginasZapatas AisladasMariana MarinAún no hay calificaciones
- Practica 5 El VenturimetroDocumento15 páginasPractica 5 El VenturimetroAllan Reyes100% (1)
- Teja EspañolaDocumento11 páginasTeja EspañolaMarcela Medina HuertasAún no hay calificaciones
- Especificaciones Técnicas Del Parque PrincipalDocumento117 páginasEspecificaciones Técnicas Del Parque Principalleon velasquezAún no hay calificaciones
- Memoria GNRE 2012Documento108 páginasMemoria GNRE 2012Gerard SalazarAún no hay calificaciones
- Mision Vision ExperienciasDocumento3 páginasMision Vision ExperienciasmiguelAún no hay calificaciones
- Bently Nevada Asset Condition Monitoring Fallas PrincipalesDocumento36 páginasBently Nevada Asset Condition Monitoring Fallas PrincipalesPedroAún no hay calificaciones
- Clase 15 - Protección en El Transformador de PotenciaDocumento25 páginasClase 15 - Protección en El Transformador de PotenciaRony CalderonAún no hay calificaciones
- Proceso 1 InventarioDocumento4 páginasProceso 1 Inventariojorge diazAún no hay calificaciones
- Diseño de Cimentaciones en Roca 2020Documento120 páginasDiseño de Cimentaciones en Roca 2020Segundo Velayarce LlanosAún no hay calificaciones