También podría gustarte
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Motor 1 KZ SensoresDocumento18 páginasMotor 1 KZ Sensoresmiriam75% (4)
- Sfi M9CT02Documento30 páginasSfi M9CT02Josue PeñaAún no hay calificaciones
- Brazo Robotico Labview+ArduinoDocumento16 páginasBrazo Robotico Labview+ArduinoGio Rmz100% (5)
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Monitoreo, control y adquisición de datos con arduino y visual basic .netDe EverandMonitoreo, control y adquisición de datos con arduino y visual basic .netAún no hay calificaciones
- Robot Seguidor Resuelve LaberintosDocumento9 páginasRobot Seguidor Resuelve LaberintosAlejandro RojasAún no hay calificaciones
- Practica#7 LabDSMDocumento6 páginasPractica#7 LabDSMAngel AldapeAún no hay calificaciones
- Ejemplo Control y Motores Carro Con ArduinoDocumento4 páginasEjemplo Control y Motores Carro Con ArduinoDaniela MatizAún no hay calificaciones
- Borrador 3 PenduloDocumento14 páginasBorrador 3 PenduloManuel Blanco MendozaAún no hay calificaciones
- Paper Pan & TiltDocumento5 páginasPaper Pan & TiltRolan DiazAún no hay calificaciones
- Control ServoDocumento6 páginasControl ServoDulce AraizaAún no hay calificaciones
- Informe 1 de Servomecanismos - Cañarte-España-Gualtor-PantojaDocumento12 páginasInforme 1 de Servomecanismos - Cañarte-España-Gualtor-PantojaCristian EspañaAún no hay calificaciones
- Practica 4 ServoDocumento14 páginasPractica 4 Servogilberto chavez0% (1)
- Practica#6 LabDSMDocumento7 páginasPractica#6 LabDSMAngel AldapeAún no hay calificaciones
- Practica de Laboratorio 8Documento12 páginasPractica de Laboratorio 8Jaiyim villalobosAún no hay calificaciones
- PRA2 MicroprocesadoresDocumento10 páginasPRA2 MicroprocesadorescristinadelapenasantiagoAún no hay calificaciones
- Control de Un Motor Con - PWMDocumento3 páginasControl de Un Motor Con - PWMRafael Aguilar RiosAún no hay calificaciones
- Practica 1 PercepcionDocumento9 páginasPractica 1 PercepcionJulio Cesar Solano GonzalezAún no hay calificaciones
- MTSMF 5a p2 (Perez Pasillas)Documento5 páginasMTSMF 5a p2 (Perez Pasillas)PAOLA AZENETH PEREZ PASILLASAún no hay calificaciones
- Actividad 6. Proyecto de Uso de Motores EléctricosDocumento5 páginasActividad 6. Proyecto de Uso de Motores Eléctricosjesusmdelgado000Aún no hay calificaciones
- Act9 Proyecto Final Pablo CervantesDocumento8 páginasAct9 Proyecto Final Pablo Cervantespabloing.tecinfoAún no hay calificaciones
- Proyecto BobinadoraDocumento6 páginasProyecto BobinadoraRichard Rojas LduAún no hay calificaciones
- Practica 2 Equipo 6Documento7 páginasPractica 2 Equipo 6Jair GonzalezAún no hay calificaciones
- Practica 2 ServoDocumento13 páginasPractica 2 Servogilberto chavezAún no hay calificaciones
- Electronicafinal PDFDocumento9 páginasElectronicafinal PDFA L E X0% (1)
- Plan de AuditoriaDocumento6 páginasPlan de Auditoriagrant tapia floresAún no hay calificaciones
- Sistema de Autodiagnóstico para Localizar Fallas en VideograbadorasDocumento8 páginasSistema de Autodiagnóstico para Localizar Fallas en VideograbadorasJose PadronAún no hay calificaciones
- Control 1Documento20 páginasControl 1Alan Del PalacioAún no hay calificaciones
- Practica#4 LabDSMDocumento6 páginasPractica#4 LabDSMAngel AldapeAún no hay calificaciones
- Carro Evita ObstaculosDocumento5 páginasCarro Evita ObstaculosGemy Carolina Zam VidalAún no hay calificaciones
- RP 19 - MotorreductorDocumento9 páginasRP 19 - MotorreductorJonathan ReyesAún no hay calificaciones
- Brazo Robotico Labview ArduinoDocumento17 páginasBrazo Robotico Labview ArduinoAdry CamachoAún no hay calificaciones
- Practica 13Documento6 páginasPractica 13Eva DiazAún no hay calificaciones
- Practica#5 LabDSMDocumento6 páginasPractica#5 LabDSMAngel AldapeAún no hay calificaciones
- EEID-418 - CUADERNOdeINF 6Documento9 páginasEEID-418 - CUADERNOdeINF 6David Villa MagallanesAún no hay calificaciones
- Practica Actuadores Eléctricos - 4-Aldahir CalderónDocumento4 páginasPractica Actuadores Eléctricos - 4-Aldahir Calderónaldahir calderon cruzAún no hay calificaciones
- Seguidor de Sol Con Sensores LDRDocumento8 páginasSeguidor de Sol Con Sensores LDRManuel LeonAún no hay calificaciones
- Practica 5 LDSMDocumento12 páginasPractica 5 LDSMOscar MedellinAún no hay calificaciones
- GuiaDocumento13 páginasGuiaDANIEL ARTURO VEGA CASTROAún no hay calificaciones
- Practica 3 "Control de Motorreductores"Documento10 páginasPractica 3 "Control de Motorreductores"Victor ServinAún no hay calificaciones
- Práctico 3 Del Curso Microprocesadores y MicrocontroladoresDocumento14 páginasPráctico 3 Del Curso Microprocesadores y MicrocontroladoresIvan BolañoAún no hay calificaciones
- Lab01 Instrumentos IndustrialesDocumento17 páginasLab01 Instrumentos IndustrialesBrayan Arapa ApazaAún no hay calificaciones
- Practicas Daniel COMPLETASDocumento10 páginasPracticas Daniel COMPLETASKarla roblesAún no hay calificaciones
- P2 1RuizMendezGerardoDocumento11 páginasP2 1RuizMendezGerardoGerardo Ruiz Méndez :cAún no hay calificaciones
- Práctica#11Documento6 páginasPráctica#11guido becerraAún no hay calificaciones
- Pratica UnoDocumento8 páginasPratica UnoRICARDO ELI SALAS ARANDAAún no hay calificaciones
- Guía Encender ECUDocumento5 páginasGuía Encender ECUWilliam Santiago CH TenesacaAún no hay calificaciones
- Lab4 ActuadoresDocumento3 páginasLab4 ActuadoressebastianAún no hay calificaciones
- Formatos Informes CNCDocumento5 páginasFormatos Informes CNCROBINSON PRADO VILLEGASAún no hay calificaciones
- Informe Trabajo 2 Con IDF0Documento9 páginasInforme Trabajo 2 Con IDF0CAMILO RIVERA OROZCOAún no hay calificaciones
- Javier Tenesaca - Proyecto Control PIDDocumento6 páginasJavier Tenesaca - Proyecto Control PIDJavier Tenesaca Ch.Aún no hay calificaciones
- 3.4 Control de Motor Paso A PasoDocumento5 páginas3.4 Control de Motor Paso A PasoManuel De Jesus ValenzuelaAún no hay calificaciones
- U2 Hacer ZmedDocumento18 páginasU2 Hacer ZmedEddy ZacariasAún no hay calificaciones
- Colab Control IIDocumento11 páginasColab Control IIHector Rosales BlancasAún no hay calificaciones
- Practica 3 Lab DSMDocumento16 páginasPractica 3 Lab DSMAlex ToledoAún no hay calificaciones
- Trabajo Final de ElectronicaDocumento13 páginasTrabajo Final de ElectronicaKevin RomeroAún no hay calificaciones
- Arduino y El Driver de Motores Paso A Paso de Pololu - Fábrica DigitalDocumento16 páginasArduino y El Driver de Motores Paso A Paso de Pololu - Fábrica DigitalJuanCarbajalJaraAún no hay calificaciones
- Proyecto de Grado 3ro Técnico (2) Ichau EdisonDocumento11 páginasProyecto de Grado 3ro Técnico (2) Ichau EdisonJEFF PUPIALESSAún no hay calificaciones
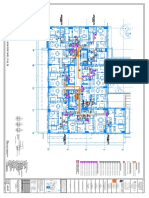
- Aa-20 Planta Tipo Departamentos High Rise Nivel 18 Al 26 TDocumento1 páginaAa-20 Planta Tipo Departamentos High Rise Nivel 18 Al 26 TGabriel Yañez JimenezAún no hay calificaciones
- CompletosConConcordanciaspdf1096694 - REFÃ RMESE LA RESOLUCIÃ N No C D 516 Y RDocumento14 páginasCompletosConConcordanciaspdf1096694 - REFÃ RMESE LA RESOLUCIÃ N No C D 516 Y Rlalfonsoal.97Aún no hay calificaciones
- Word - Lecccion1-Descripcion de WordDocumento24 páginasWord - Lecccion1-Descripcion de WordKenia LopezAún no hay calificaciones
- Lab 03 - Interruptores Fotoelectricos CompletoDocumento7 páginasLab 03 - Interruptores Fotoelectricos CompletoLuis MessaAún no hay calificaciones
- Medidores BidireccionalesDocumento4 páginasMedidores BidireccionalesLizeth Karla Gonzales TancaraAún no hay calificaciones
- Introduccion A Los Procesos Aca 1Documento18 páginasIntroduccion A Los Procesos Aca 1Karen GonzálezAún no hay calificaciones
- Aspectos Constructivos de Componentes de Mecanismos MciDocumento9 páginasAspectos Constructivos de Componentes de Mecanismos MciJuan TiconaAún no hay calificaciones
- Img 20201116 0003 PDFDocumento1 páginaImg 20201116 0003 PDFJhurry Luis CruzAún no hay calificaciones
- Ideas Creativas OdsDocumento6 páginasIdeas Creativas OdsJose Rick Prada GuzmanAún no hay calificaciones
- Planeacion Importancia y Sus PrincipiosDocumento6 páginasPlaneacion Importancia y Sus PrincipiosMurdocSandovalAún no hay calificaciones
- Tarea Academica Semana 2 Grupal - Gestion Del RiesgoDocumento5 páginasTarea Academica Semana 2 Grupal - Gestion Del RiesgoGiomar Guillen BorjaAún no hay calificaciones
- P HPG: Fuerza de FlotaciónDocumento7 páginasP HPG: Fuerza de FlotaciónWilfredo Penate FigueroaAún no hay calificaciones
- FT - Frixo 315Documento3 páginasFT - Frixo 315Calidad RancheritosAún no hay calificaciones
- Telesentinel Junio Juklio PDFDocumento3 páginasTelesentinel Junio Juklio PDFSymmetry RecordsAún no hay calificaciones
- RT 02 PT Ona 001Documento2 páginasRT 02 PT Ona 001Nicole Hernandez De ValerioAún no hay calificaciones
- Manual CamaraDocumento6 páginasManual CamaraCésarAún no hay calificaciones
- Manual 2020 - Elaboración Proyecto de Tesis PDFDocumento32 páginasManual 2020 - Elaboración Proyecto de Tesis PDFDiego Carlos Leon Leon100% (1)
- Alvenius EspañolDocumento4 páginasAlvenius EspañolJOSE HUAMANIAún no hay calificaciones
- Calculo de Tamaño de Muestra-Plantilla de ExcelDocumento2 páginasCalculo de Tamaño de Muestra-Plantilla de ExcelMagda Ramos adrianoAún no hay calificaciones
- Tecnicas de Elaboracion de Informes ScribDocumento3 páginasTecnicas de Elaboracion de Informes ScribMYRIAM YANETH GUTIERREZ LEONAún no hay calificaciones
- DD 8 4 EspDocumento16 páginasDD 8 4 Espparaqqq3Aún no hay calificaciones
- Asignación 27Documento4 páginasAsignación 27Fabrizio GiacobbeAún no hay calificaciones
- DocDatosGenerales 97205 3A1 8 1 2019 02 06 15 02 33 590 1Documento2 páginasDocDatosGenerales 97205 3A1 8 1 2019 02 06 15 02 33 590 1Ricardo TorresAún no hay calificaciones
- Equipo 10 Sistema de Gestión Logístico para Procesos de ServiciosDocumento21 páginasEquipo 10 Sistema de Gestión Logístico para Procesos de ServiciosEsmeralda lisseth merino rojasAún no hay calificaciones
- Cómo Cambiar - Pastillas de Freno de La Parte Trasera - TOYOTA HILUX III Pick-Up (TGN1 - , GGN2 - , GGN1 - , KUN2 - , KUN1 - ) - Guía de SustituciónDocumento13 páginasCómo Cambiar - Pastillas de Freno de La Parte Trasera - TOYOTA HILUX III Pick-Up (TGN1 - , GGN2 - , GGN1 - , KUN2 - , KUN1 - ) - Guía de SustituciónJaime Alejandro Gallegos YoungAún no hay calificaciones
- Informe Mensual Y Semanal de Calidad Y Ssoma Del Mes Mayo 2023, Aprobado en Aconex 03) I.E Villa MariaDocumento1 páginaInforme Mensual Y Semanal de Calidad Y Ssoma Del Mes Mayo 2023, Aprobado en Aconex 03) I.E Villa MariaMarco MartinezAún no hay calificaciones
- Guía de Álgebra y Geometría - Imprimir - OctavoDocumento6 páginasGuía de Álgebra y Geometría - Imprimir - OctavoJose MoraAún no hay calificaciones
- Project-Charter - Acta de ConstituciónDocumento4 páginasProject-Charter - Acta de ConstituciónEdward Jonatan Quispe GomezAún no hay calificaciones
- Pasos A Seguir para Dar Referencia A Videos de YoutubeDocumento3 páginasPasos A Seguir para Dar Referencia A Videos de YoutubeJohslyn Dayana Mendoza TuestaAún no hay calificaciones
- Mvmeter2 Manual - En.esDocumento5 páginasMvmeter2 Manual - En.esHernan GonzalezAún no hay calificaciones