También podría gustarte
- Diseño e Implementación Del Control Electrónico Digital Del Motor de Un Coche EléctricoDocumento65 páginasDiseño e Implementación Del Control Electrónico Digital Del Motor de Un Coche EléctricoRaulJoseRainieriAún no hay calificaciones
- TAREA07Documento9 páginasTAREA07gonzalo lopezAún no hay calificaciones
- Qué Es Una ECUDocumento71 páginasQué Es Una ECUJohnny Palacios75% (4)
- Robot Balancin-Ingenieria de ControlDocumento25 páginasRobot Balancin-Ingenieria de ControlJorge Carlos Mogollon Rojas50% (2)
- Auto ClimaDocumento21 páginasAuto ClimaJuancho VargasAún no hay calificaciones
- Practica 4 ServoDocumento14 páginasPractica 4 Servogilberto chavez0% (1)
- Glab S05 Ralva 2019 02 C10 1Documento5 páginasGlab S05 Ralva 2019 02 C10 1Ellis Gerson Vasquez ChaconAún no hay calificaciones
- Control de semáforo, faja transportadora y calidad con PLCDocumento5 páginasControl de semáforo, faja transportadora y calidad con PLCEllis Gerson Vasquez ChaconAún no hay calificaciones
- Control Motor Stepper Labview ArduinoDocumento8 páginasControl Motor Stepper Labview ArduinoJorge Santiago Montiel100% (1)
- Informe de Laboratorio #5Documento8 páginasInforme de Laboratorio #5Lil GaugeAún no hay calificaciones
- Informe Practica 4 Grupo3Documento6 páginasInforme Practica 4 Grupo3Paola VillalbaAún no hay calificaciones
- Práctica #4 EncoderDocumento10 páginasPráctica #4 EncoderCarlos Eduardo De La Rosa VillaAún no hay calificaciones
- Pract2 DSMDocumento9 páginasPract2 DSMMiguel SalasAún no hay calificaciones
- Practica 3. Operacion de Motores SecuanciadosDocumento11 páginasPractica 3. Operacion de Motores SecuanciadosFranciscoAún no hay calificaciones
- Practica de Laboratorio 8Documento12 páginasPractica de Laboratorio 8Jaiyim villalobosAún no hay calificaciones
- Reporte Robot CopaDocumento22 páginasReporte Robot CopanekokanamealexisAún no hay calificaciones
- Informe Encoder Alcoser AldanaDocumento6 páginasInforme Encoder Alcoser AldanaEfra AlcoserAún no hay calificaciones
- Manual ServomotoresDocumento16 páginasManual ServomotoresErik SilvaAún no hay calificaciones
- Motor Paso A Paso en ArduinoDocumento14 páginasMotor Paso A Paso en ArduinoPabloCárdenasGAún no hay calificaciones
- Control de Maquinas Electricas II4Documento4 páginasControl de Maquinas Electricas II4Alfredo RodriguezAún no hay calificaciones
- Servomecanismos AF4 Implementación de Una Tarjeta de Control de Servomotor.Documento11 páginasServomecanismos AF4 Implementación de Una Tarjeta de Control de Servomotor.Edwin IsraelAún no hay calificaciones
- Robot Codigo en Matlab 3.3Documento76 páginasRobot Codigo en Matlab 3.3Axel HernandezAún no hay calificaciones
- El Sector de La AutomociónDocumento97 páginasEl Sector de La Automociónbernard_28Aún no hay calificaciones
- Motor Paso A Paso (Parte 2.1Documento14 páginasMotor Paso A Paso (Parte 2.1EDUARDO GARCIA CORTÉSAún no hay calificaciones
- Proyecto Chasis 2wd A Adaptación Arduino (Recuperado Automáticamente)Documento24 páginasProyecto Chasis 2wd A Adaptación Arduino (Recuperado Automáticamente)jhoanAún no hay calificaciones
- LABORATORIO TacómetroDocumento11 páginasLABORATORIO TacómetroDennis JaramilloAún no hay calificaciones
- Laboratorio Nº1automata PLCDocumento15 páginasLaboratorio Nº1automata PLCMaximo RagnarAún no hay calificaciones
- Equipo 4 Práctica 3 PLC AvanzadoDocumento18 páginasEquipo 4 Práctica 3 PLC AvanzadoHector OleaAún no hay calificaciones
- 1IEE09 L6 GuiaTeorica Asm 2021 01Documento17 páginas1IEE09 L6 GuiaTeorica Asm 2021 01AlexsandraJ.CorderoDonaireAún no hay calificaciones
- Motor PasoDocumento38 páginasMotor PasolizbethAún no hay calificaciones
- Club 84Documento84 páginasClub 84Daniel Avecilla100% (8)
- Practica#6 LabDSMDocumento7 páginasPractica#6 LabDSMAngel AldapeAún no hay calificaciones
- Practica 4 Lab. DSMDocumento10 páginasPractica 4 Lab. DSMSalvador Sanchez RosasAún no hay calificaciones
- Trabajo Final de ElectronicaDocumento13 páginasTrabajo Final de ElectronicaKevin RomeroAún no hay calificaciones
- Borrador 3 PenduloDocumento14 páginasBorrador 3 PenduloManuel Blanco MendozaAún no hay calificaciones
- Trabajo Grado - Yamid EspinelDocumento83 páginasTrabajo Grado - Yamid EspinelRoroAún no hay calificaciones
- BetoDocumento22 páginasBetoTatiana Rina0% (1)
- Practica 4 Lds MDocumento9 páginasPractica 4 Lds MOscar MedellinAún no hay calificaciones
- Práctica #1 Lab Sensores y ActuadoresDocumento19 páginasPráctica #1 Lab Sensores y ActuadoresOscar Sánchez100% (1)
- Actividad 3 Servomecanismos ClaseDocumento14 páginasActividad 3 Servomecanismos ClaseElizabethAún no hay calificaciones
- Practica 1 Motor A PasosDocumento10 páginasPractica 1 Motor A Pasoscsar_grana2100% (1)
- Plan de AuditoriaDocumento6 páginasPlan de Auditoriagrant tapia floresAún no hay calificaciones
- MotoresDocumento7 páginasMotoresAlejandro MartinezAún no hay calificaciones
- Reporte Arranque y Paro Con TimmerDocumento14 páginasReporte Arranque y Paro Con TimmerClaudio Martinez CastroAún no hay calificaciones
- Pratica UnoDocumento8 páginasPratica UnoRICARDO ELI SALAS ARANDAAún no hay calificaciones
- Informe Control Motor DCDocumento13 páginasInforme Control Motor DCJimmyGallegosAún no hay calificaciones
- Actividad 6Documento8 páginasActividad 6Omar PeñaAún no hay calificaciones
- Proyecto Integrador Auto Autónomo, Facultad UTEC, UruguayDocumento29 páginasProyecto Integrador Auto Autónomo, Facultad UTEC, UruguayJoaquin QuinterosAún no hay calificaciones
- Colab Control IIDocumento11 páginasColab Control IIHector Rosales BlancasAún no hay calificaciones
- CFGBNMDocumento5 páginasCFGBNMAnonymous SrpvDZo5CAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- Guía de instalación para viviendasDe EverandGuía de instalación para viviendasCalificación: 5 de 5 estrellas5/5 (1)
- Guía de instalación para locales de pública concurrenciaDe EverandGuía de instalación para locales de pública concurrenciaCalificación: 5 de 5 estrellas5/5 (1)
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaDe EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaCalificación: 5 de 5 estrellas5/5 (1)
- Arduino. Guía práctica de fundamentos y simulación: RobóticaDe EverandArduino. Guía práctica de fundamentos y simulación: RobóticaCalificación: 4.5 de 5 estrellas4.5/5 (5)
- UF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosDe EverandUF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosAún no hay calificaciones
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Saber Hacer 2 Unidad 1Documento7 páginasSaber Hacer 2 Unidad 1Eddy ZacariasAún no hay calificaciones
- FISICADocumento2 páginasFISICAEddy ZacariasAún no hay calificaciones
- FISICADocumento7 páginasFISICAEddy ZacariasAún no hay calificaciones
- Manufactura FlexibleDocumento14 páginasManufactura FlexibleEddy ZacariasAún no hay calificaciones
- Sistemas DigitalesDocumento16 páginasSistemas DigitalesEddy ZacariasAún no hay calificaciones
- Manufactura FlexibleDocumento29 páginasManufactura FlexibleEddy ZacariasAún no hay calificaciones
- SaberDocumento14 páginasSaberEddy ZacariasAún no hay calificaciones
- Unidad 1 Saber 3Documento9 páginasUnidad 1 Saber 3Eddy ZacariasAún no hay calificaciones
- Calidad y MetodologiasDocumento10 páginasCalidad y MetodologiasEddy ZacariasAún no hay calificaciones
- Ecuaciones DiferencialesDocumento12 páginasEcuaciones DiferencialesEddy ZacariasAún no hay calificaciones
- Unidad 1 Saber 2Documento8 páginasUnidad 1 Saber 2Eddy ZacariasAún no hay calificaciones
- U2 Saber ZmedDocumento22 páginasU2 Saber ZmedEddy ZacariasAún no hay calificaciones
- Saber Hacer 1 Unidad 3Documento3 páginasSaber Hacer 1 Unidad 3Eddy ZacariasAún no hay calificaciones
- U3 Saber ZmedDocumento24 páginasU3 Saber ZmedEddy ZacariasAún no hay calificaciones
- Curso Basico de LabViewDocumento265 páginasCurso Basico de LabViewMafer Ruiz EstudilloAún no hay calificaciones
- Labview V 3.2Documento167 páginasLabview V 3.2Eddy ZacariasAún no hay calificaciones
- Curso Basico de LabViewDocumento265 páginasCurso Basico de LabViewMafer Ruiz EstudilloAún no hay calificaciones
- Zacarias Marin Saber Hacer Unidad 1Documento13 páginasZacarias Marin Saber Hacer Unidad 1Eddy ZacariasAún no hay calificaciones
- 8617 41 8 PDFDocumento368 páginas8617 41 8 PDFLuis Gerardo Escandon AlcazarAún no hay calificaciones
- Zacarias Marin Saber Hacer Unidad 1Documento13 páginasZacarias Marin Saber Hacer Unidad 1Eddy ZacariasAún no hay calificaciones
- Manual de Instalación de Detector de Humos Por Aspiración y CONCEPTOSDocumento60 páginasManual de Instalación de Detector de Humos Por Aspiración y CONCEPTOSFRANKAún no hay calificaciones
- Practica 2Documento10 páginasPractica 2Diego NegreteAún no hay calificaciones
- Simbologia 60617 IeeeDocumento5 páginasSimbologia 60617 IeeecesardarevalogAún no hay calificaciones
- Ejercicios de Amplificadores de PotenciaDocumento14 páginasEjercicios de Amplificadores de PotenciaAlberth VieraAún no hay calificaciones
- Balastos PhilipsDocumento6 páginasBalastos PhilipsandressebasAún no hay calificaciones
- Formato de Checklist Site SurveyDocumento14 páginasFormato de Checklist Site SurveyAndrea LopezAún no hay calificaciones
- Informe 2 Diodo SemiconductorDocumento7 páginasInforme 2 Diodo SemiconductorGeral HernandezAún no hay calificaciones
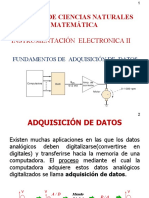
- Clase1 AdquisicionDocumento18 páginasClase1 AdquisicionandersonAún no hay calificaciones
- 14 - Guia de Laboratorio - #14Documento7 páginas14 - Guia de Laboratorio - #14EDWARD ABEL LUGO HUERTAAún no hay calificaciones
- Modulo de RedesDocumento75 páginasModulo de Redescarmenamarilis100% (1)
- Conductores de cobre Ultraflex multiconductor para 1 kVDocumento2 páginasConductores de cobre Ultraflex multiconductor para 1 kVManuel OchoaAún no hay calificaciones
- Instalaciones de Alumbrado Guia1 - CEC4044Documento8 páginasInstalaciones de Alumbrado Guia1 - CEC4044Ale González TorresAún no hay calificaciones
- Sensores SCRDocumento30 páginasSensores SCRedadel23Aún no hay calificaciones
- Medición de resistencia de aislamiento, índice de polarización y absorción dieléctrica en laboratorio 1Documento20 páginasMedición de resistencia de aislamiento, índice de polarización y absorción dieléctrica en laboratorio 1NESTOR HUINCHO LEONAún no hay calificaciones
- Programacion AtmegaDocumento6 páginasProgramacion AtmegaJuan G Mamani FernandezAún no hay calificaciones
- CKPDocumento39 páginasCKPFernando VargasAún no hay calificaciones
- Visualizador Del Examen - Chapter 11 Exam - IT Essentials (Versión 4.0)Documento4 páginasVisualizador Del Examen - Chapter 11 Exam - IT Essentials (Versión 4.0)Alexander MagnusAún no hay calificaciones
- Reporte IEI #1Documento8 páginasReporte IEI #1William BarahonaAún no hay calificaciones
- Apqd Apqd-332 ContenidosDocumento6 páginasApqd Apqd-332 ContenidosChristian MeierAún no hay calificaciones
- Ilukon Panel BacklightDocumento1 páginaIlukon Panel BacklightRoberto PlateroAún no hay calificaciones
- Guia 1 - (1f, 2h, Monofasico) - Prueba Vectorial y Prueba Rapida-cet-Aes El SalvadorDocumento5 páginasGuia 1 - (1f, 2h, Monofasico) - Prueba Vectorial y Prueba Rapida-cet-Aes El SalvadorGuillermo NajarroAún no hay calificaciones
- Electrónica Analógica I U MendozaDocumento6 páginasElectrónica Analógica I U MendozaCarlos VillegasAún no hay calificaciones
- Cuestionario #2Documento2 páginasCuestionario #2arliz jaquezAún no hay calificaciones
- Un Circuito Que Actúa Como Filtro Se Diseña para Dejar Pasar Señales de Un Determinado Rango de Frecuencias y para Rechazar o Atenuar Señales Cuyo Espectro de Frecuencia Está Fuera de Dicho RangoDocumento17 páginasUn Circuito Que Actúa Como Filtro Se Diseña para Dejar Pasar Señales de Un Determinado Rango de Frecuencias y para Rechazar o Atenuar Señales Cuyo Espectro de Frecuencia Está Fuera de Dicho RangoRonald SalloAún no hay calificaciones
- Instrumentación Electronica I - Puentes de MediciónDocumento11 páginasInstrumentación Electronica I - Puentes de MediciónAlfredo Di LauroAún no hay calificaciones
- Sistemas Digitales y Ensambladores FinalDocumento24 páginasSistemas Digitales y Ensambladores FinalDaniela Sofía WilsonAún no hay calificaciones
- Reglamento Resesate 2013 ArequipaDocumento113 páginasReglamento Resesate 2013 ArequipaPercy Niño Vasquez0% (1)
- Capítulo III 20b-III ParteDocumento22 páginasCapítulo III 20b-III ParteEr IckAún no hay calificaciones
- Instalaciones Eléctricas IndustrialesDocumento4 páginasInstalaciones Eléctricas IndustrialesJordano Isla RamosAún no hay calificaciones
- Actividad 09Documento12 páginasActividad 09jcsaadfAún no hay calificaciones