También podría gustarte
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Control de Motores Con Rele TemporizadoresDocumento9 páginasControl de Motores Con Rele TemporizadoresAlfredo Esobar Tino100% (1)
- CAM - Unidad 1 - Tema 6 - Conceptos Básicos de ControlDocumento11 páginasCAM - Unidad 1 - Tema 6 - Conceptos Básicos de ControlAreas de GradoAún no hay calificaciones
- Micro PLC - Tarea Unidad II - Andrada - SergioDocumento2 páginasMicro PLC - Tarea Unidad II - Andrada - SergiosergitoandradaAún no hay calificaciones
- Practica Con Rele TemporizadorDocumento8 páginasPractica Con Rele TemporizadorAlfredo Esobar Tino0% (1)
- Control Eléctrico ConvencionalDocumento12 páginasControl Eléctrico ConvencionalPierinaAún no hay calificaciones
- Control IndustrialDocumento49 páginasControl IndustrialMaría Belén Añazco SalazarAún no hay calificaciones
- Actividad 1Documento17 páginasActividad 1sharonAún no hay calificaciones
- Control IndustrialDocumento49 páginasControl IndustrialDavid BravoAún no hay calificaciones
- La Automatización Es La Sustitución de La Acción Humana Por Mecanismos Movidos Por Una Fuente Externa de EnergíaDocumento16 páginasLa Automatización Es La Sustitución de La Acción Humana Por Mecanismos Movidos Por Una Fuente Externa de EnergíaRichar GuzmanAún no hay calificaciones
- ElectroneumáticaDocumento4 páginasElectroneumáticaalanAún no hay calificaciones
- Lab 5 - ElectroneumáticaDocumento11 páginasLab 5 - Electroneumáticalaura cortesAún no hay calificaciones
- Esquemas ElectricosDocumento141 páginasEsquemas ElectricosCarlos Martin100% (3)
- Evidencia 2. Taller. Interpretar Los Componentes en Un Sistema de Control.Documento5 páginasEvidencia 2. Taller. Interpretar Los Componentes en Un Sistema de Control.Wilmer RuizAún no hay calificaciones
- Tarea Unidad Ii - Leandro OchoaDocumento3 páginasTarea Unidad Ii - Leandro Ochoaleandroochoa1Aún no hay calificaciones
- Elementos ElectricosDocumento17 páginasElementos Electricosgersontelule838Aún no hay calificaciones
- Formas de Reprecentar AutomatismosDocumento10 páginasFormas de Reprecentar Automatismossusana_290493Aún no hay calificaciones
- Unidad 4 Ing - Control ClasicoDocumento41 páginasUnidad 4 Ing - Control ClasicoJORGESOLANOIEM100% (3)
- Resumen ActuadoresDocumento8 páginasResumen ActuadoresSandra PerezAún no hay calificaciones
- AutomatismoDocumento71 páginasAutomatismoChloe LambAún no hay calificaciones
- Elementos o Dispositivos Que Forman Un AutomatismoDocumento2 páginasElementos o Dispositivos Que Forman Un AutomatismoArturo Razo RosalesAún no hay calificaciones
- Automatismos EléctricosDocumento28 páginasAutomatismos EléctricosJorge Carlos AlpireAún no hay calificaciones
- SENSORESDocumento26 páginasSENSORESJohn Saavedra PaltaAún no hay calificaciones
- 03 Esquemas Eléctricos de Mando de Potencia y Arranque de Motores IndustrialesDocumento2 páginas03 Esquemas Eléctricos de Mando de Potencia y Arranque de Motores IndustrialesJTN16Aún no hay calificaciones
- Controladores de CorrienteDocumento11 páginasControladores de CorrienteAreas de GradoAún no hay calificaciones
- Sistema de Control 4°3Documento11 páginasSistema de Control 4°3Luly GuardattiAún no hay calificaciones
- AutoDocumento10 páginasAutoJhulian VillafuerteAún no hay calificaciones
- Esquemas ElectricosDocumento141 páginasEsquemas ElectricosCarlos Martin100% (1)
- Informe N2Documento11 páginasInforme N2Jhulian VillafuerteAún no hay calificaciones
- Elementos de Control y Protección de MotoresDocumento8 páginasElementos de Control y Protección de Motoresadiel leonAún no hay calificaciones
- Control (Electricidad)Documento8 páginasControl (Electricidad)Dann RhapsodyAún no hay calificaciones
- Automatismos EléctricosDocumento30 páginasAutomatismos EléctricosJose Gabriel Jerez AlvarezAún no hay calificaciones
- Entregable 2Documento15 páginasEntregable 2Marlon Bastidas SeguraAún no hay calificaciones
- Curso de Instalación, Arranque y Encendido de Motores TrifasicosDocumento83 páginasCurso de Instalación, Arranque y Encendido de Motores TrifasicosJR CarreroAún no hay calificaciones
- ElectrotecniaDocumento5 páginasElectrotecniaangie cuatinAún no hay calificaciones
- Fases EléctricasDocumento6 páginasFases EléctricasAndres OrtegaAún no hay calificaciones
- Definición Y Clasificación de RelésDocumento6 páginasDefinición Y Clasificación de RelésFrancisco Gomez SdvsfAún no hay calificaciones
- Automatismos EléctricosDocumento41 páginasAutomatismos EléctricosAlex David100% (1)
- Arranque Directo de Motor TrifásicoDocumento22 páginasArranque Directo de Motor TrifásicoanyerAún no hay calificaciones
- Informe Previo 7Documento11 páginasInforme Previo 7Luis Fernando Osorio SanchezAún no hay calificaciones
- Automatismos EléctricosDocumento43 páginasAutomatismos EléctricosEdison Mayo MayoAún no hay calificaciones
- emas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas deDocumento61 páginasemas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas dejenson100% (2)
- Trifasico CadesimuDocumento6 páginasTrifasico CadesimujealromaAún no hay calificaciones
- Reporte P1 U1 Equipo 1Documento20 páginasReporte P1 U1 Equipo 1José Francisco Hernández GalvánAún no hay calificaciones
- Automatismos ElectricosDocumento30 páginasAutomatismos ElectricosGirenia Martinez0% (1)
- Evidencia 5 Ejercicios de Electroneumatica y Evidencia de Practicas en El LaboratorioDocumento26 páginasEvidencia 5 Ejercicios de Electroneumatica y Evidencia de Practicas en El LaboratorioVICTOR LUIS MORON CENTENOAún no hay calificaciones
- Accionador EsDocumento13 páginasAccionador EsCarla Yánez RodríguezAún no hay calificaciones
- Aplicaciones de La Electro NeumáticaDocumento3 páginasAplicaciones de La Electro Neumáticacarlos acostaAún no hay calificaciones
- Investigación Unidad 4 InstrumentacionDocumento27 páginasInvestigación Unidad 4 InstrumentacionDanna LopezAún no hay calificaciones
- Práctica 6 Control A Tension Reducida de Motor ElectricoDocumento23 páginasPráctica 6 Control A Tension Reducida de Motor ElectricoAntonio Joksan Palacios IñiguezAún no hay calificaciones
- Controles Automaticos ComponentesDocumento26 páginasControles Automaticos ComponentesAugusto SerrisuelaAún no hay calificaciones
- Informe I - Control IndustrialDocumento6 páginasInforme I - Control IndustrialEsteban PazmiñoAún no hay calificaciones
- Secuencia Forzada LifodocxDocumento15 páginasSecuencia Forzada LifodocxhmacrAún no hay calificaciones
- Que Es Un Sistema de ControlDocumento12 páginasQue Es Un Sistema de ControlMargenis CoelloAún no hay calificaciones
- PAE Clase 1Documento4 páginasPAE Clase 1Adrián SuárezAún no hay calificaciones
- Conceptos Básicos DE SISTEMA DE CONTROLDocumento8 páginasConceptos Básicos DE SISTEMA DE CONTROLrachelAún no hay calificaciones
- Automatismos EléctricosDocumento45 páginasAutomatismos EléctricosYuliana MaríaAún no hay calificaciones
- U2 Informe Electroneumatica CascadaDocumento6 páginasU2 Informe Electroneumatica CascadaEdwin BunciAún no hay calificaciones
- Trabajo Lazo CerradoDocumento16 páginasTrabajo Lazo CerradochicotonyxdAún no hay calificaciones
- Elementos de Control y MandoDocumento10 páginasElementos de Control y MandoHernandez Moises75% (4)
- Tarea Unidad VIDocumento3 páginasTarea Unidad VIGuillermo CarreraAún no hay calificaciones
- Análisis Institucional - FinalDocumento4 páginasAnálisis Institucional - FinalGuillermo CarreraAún no hay calificaciones
- Actividad Final - PedagogíaDocumento4 páginasActividad Final - PedagogíaGuillermo CarreraAún no hay calificaciones
- Carrera Guillermo DPRE TF 04Documento7 páginasCarrera Guillermo DPRE TF 04Guillermo CarreraAún no hay calificaciones
- Simbología SoldaduraDocumento4 páginasSimbología SoldaduraGuillermo Carrera0% (1)
- Instructivo 2023-1 MAE Economia FIN Nov2021Documento10 páginasInstructivo 2023-1 MAE Economia FIN Nov2021Eliana AlvarezAún no hay calificaciones
- FinancieraDocumento11 páginasFinancieraLinares SaraAún no hay calificaciones
- Mantenimiento Centrado en La ConfiabilidadDocumento3 páginasMantenimiento Centrado en La Confiabilidadmelow chipAún no hay calificaciones
- Cultura MocheDocumento54 páginasCultura MocheMilnert Vp100% (1)
- Reactividad de MetalesDocumento7 páginasReactividad de MetalesKarla Valderrama CardozoAún no hay calificaciones
- Trabajo MaizDocumento17 páginasTrabajo MaizSaida Julieth Galeano DuarteAún no hay calificaciones
- BitácoraDocumento15 páginasBitácorajfegioteamriton3Aún no hay calificaciones
- Parcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Documento8 páginasParcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Lady BonAún no hay calificaciones
- Plan de NegocioDocumento13 páginasPlan de NegocioJaime Pelaez100% (1)
- Tap - Ullpuy Cereales AndinosDocumento87 páginasTap - Ullpuy Cereales AndinosJulio Fernandez IparraguirreAún no hay calificaciones
- Unidad I Programacion Computacional IVDocumento71 páginasUnidad I Programacion Computacional IVEmerson Humberto Lopez CruzAún no hay calificaciones
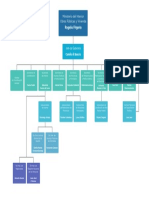
- Organigrama Ministerio Del Interior 1 - ARGENTINADocumento1 páginaOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozAún no hay calificaciones
- ARGUMENTOS PARA DEBATE Considera Ideal Que Necesariamente Debemos Optar Por El Uso de Las Energías RenovablesDocumento3 páginasARGUMENTOS PARA DEBATE Considera Ideal Que Necesariamente Debemos Optar Por El Uso de Las Energías RenovablesRuth Nelida Aquise QuispeAún no hay calificaciones
- Costo Beneficio de Una CarreteraDocumento6 páginasCosto Beneficio de Una CarreteraVeronica MartinezAún no hay calificaciones
- Rítmica. Iniciacion Musical PDFDocumento53 páginasRítmica. Iniciacion Musical PDFJonathan kazanAún no hay calificaciones
- 3.0. Diagrama PourbaixDocumento40 páginas3.0. Diagrama PourbaixJair Jhosue Zavala Rojas100% (1)
- Manual Tecnologico 2021Documento45 páginasManual Tecnologico 2021hgpAún no hay calificaciones
- Cracker Book by Vlad Acid Raven El PadrinoDocumento169 páginasCracker Book by Vlad Acid Raven El Padrinodsdsfgfdgfd100% (1)
- Según JacksonDocumento2 páginasSegún JacksonAnthony HMAún no hay calificaciones
- Diapositivas Accodc AyshmDocumento41 páginasDiapositivas Accodc AyshmRogger JAckAún no hay calificaciones
- D-100-Reglamento de Perforacion Teck CDADocumento23 páginasD-100-Reglamento de Perforacion Teck CDAhugoDiaz1981Aún no hay calificaciones
- ¿Qué Es El Método DELPHI y Cómo Se AplicaDocumento9 páginas¿Qué Es El Método DELPHI y Cómo Se AplicaCESAR/RIJO CRISTIAN RAFAEL100% (1)
- 10mo Rubrica Proyecto 3-1-14424532Documento2 páginas10mo Rubrica Proyecto 3-1-14424532LexaAún no hay calificaciones
- Une 20323 1978Documento4 páginasUne 20323 1978haroldalconzAún no hay calificaciones
- La Pobre AnastasiaDocumento22 páginasLa Pobre AnastasiaAnita Pérez0% (1)
- Ogunda MafunDocumento3 páginasOgunda MafunbobdiazfrancoAún no hay calificaciones
- Seguridad Electrica 2024Documento21 páginasSeguridad Electrica 2024Alex MuñozAún no hay calificaciones
- Actividad Virtual N°3 - Revisión de IntentosDocumento4 páginasActividad Virtual N°3 - Revisión de IntentosEDU PALOMINO MENDOZAAún no hay calificaciones
- El Proyecto VenusDocumento1 páginaEl Proyecto VenusAnonymous ko3kUoAún no hay calificaciones